基于變速傳動(dòng)裝置實(shí)現(xiàn)的主動(dòng)式轉(zhuǎn)向系統(tǒng)綜述*
2021-06-04 07:51:06葛文龍屈小貞馮浩軒孫飛宇邢建黨王暢金慶祥
汽車實(shí)用技術(shù) 2021年10期
關(guān)鍵詞:系統(tǒng)
葛文龍,屈小貞,馮浩軒,孫飛宇,邢建黨,王暢,金慶祥
(遼寧工業(yè)大學(xué)汽車與交通工程學(xué)院,遼寧 錦州 121001)
前言
汽車常規(guī)轉(zhuǎn)向系統(tǒng)的轉(zhuǎn)向傳動(dòng)比始終是固定不變的,無論車輛在低速下或高速下行駛很難平衡轉(zhuǎn)向系統(tǒng)的輕便性和穩(wěn)定性問題。而主動(dòng)式轉(zhuǎn)向系統(tǒng)在任意車速下都能提供理想的轉(zhuǎn)向輪轉(zhuǎn)角,可保障汽車在較低的車速范圍內(nèi)使轉(zhuǎn)向操控變得更加靈活和在較高的車速范圍內(nèi)會(huì)使轉(zhuǎn)向系統(tǒng)操控變得更加穩(wěn)定可靠[1-2]。目前主動(dòng)式轉(zhuǎn)向系統(tǒng)主要是通過增設(shè)變速傳動(dòng)裝置實(shí)現(xiàn)轉(zhuǎn)向傳動(dòng)比可變,確保車輛在任何速度下都能提供理想的轉(zhuǎn)向傳動(dòng)比。
1 變速傳動(dòng)裝置
基于變速傳動(dòng)裝置實(shí)現(xiàn)的主動(dòng)式轉(zhuǎn)向系統(tǒng)主要是通過變速傳動(dòng)裝置實(shí)現(xiàn)的轉(zhuǎn)向傳動(dòng)比可變,此類變速傳動(dòng)裝置具有同步差速功能,保障轉(zhuǎn)向系統(tǒng)工作過程中從轉(zhuǎn)向盤輸入到轉(zhuǎn)向車輪輸出的連續(xù)性。
如圖1所示的變速傳動(dòng)裝置通過雙排行星齒輪的相互嚙合來實(shí)現(xiàn)變速傳遞的,通過約束或鎖止行星齒輪機(jī)構(gòu)中的不同部件來實(shí)現(xiàn)不同的傳動(dòng)比大小。
如圖2所示的變速傳動(dòng)裝置是通過齒輪的相互嚙合來實(shí)現(xiàn)變速傳遞的,該變速傳動(dòng)裝置內(nèi)設(shè)置三組常嚙合齒輪,通過鎖環(huán)式同步器改變變速傳動(dòng)裝置內(nèi)的齒輪傳動(dòng)路徑來改變傳動(dòng)比大小。

圖1 行星齒輪變速傳動(dòng)裝置簡圖
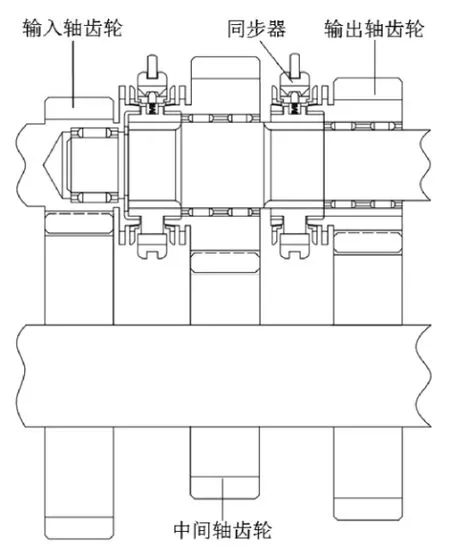
圖2 齒輪變速傳動(dòng)裝置簡圖
2 基于變速傳動(dòng)裝置的主動(dòng)式轉(zhuǎn)向系統(tǒng)
基于行星齒輪變速傳動(dòng)裝置實(shí)現(xiàn)的主動(dòng)式轉(zhuǎn)向系統(tǒng)是在轉(zhuǎn)向軸與轉(zhuǎn)向器之間加裝一組如圖3所示的雙行星齒輪機(jī)構(gòu)與蝸輪蝸桿機(jī)構(gòu)[3],該主動(dòng)式轉(zhuǎn)向系統(tǒng)是通過電機(jī)對蝸輪蝸桿調(diào)節(jié)雙行星齒輪機(jī)構(gòu)的運(yùn)動(dòng)關(guān)系,實(shí)現(xiàn)獨(dú)立于駕駛員操縱轉(zhuǎn)向盤轉(zhuǎn)角的轉(zhuǎn)向疊加功能,以實(shí)現(xiàn)改變轉(zhuǎn)向系統(tǒng)的轉(zhuǎn)向傳動(dòng)比。當(dāng)車速在低速范圍時(shí),雙行星齒輪機(jī)構(gòu)伺服電機(jī)的調(diào)整角和方向盤轉(zhuǎn)角同向輸入,使得系統(tǒng)的傳動(dòng)比變小;當(dāng)車速到達(dá)中高速范圍時(shí),伺服電機(jī)的調(diào)整角和方向盤轉(zhuǎn)角反向輸入使得系統(tǒng)的傳動(dòng)比變大,提高轉(zhuǎn)向時(shí)汽車的穩(wěn)定性。
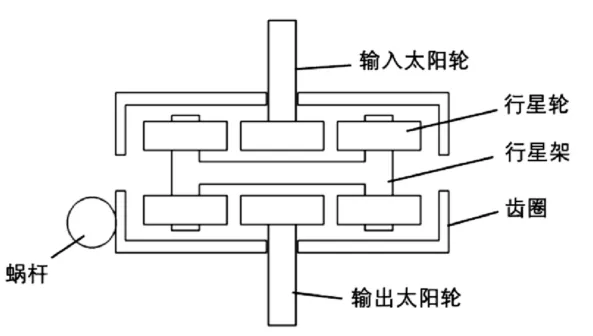
圖3 雙行星齒輪變速傳動(dòng)裝置結(jié)構(gòu)圖
基于行星齒輪變速傳動(dòng)裝置實(shí)現(xiàn)的另一種主動(dòng)式轉(zhuǎn)向系統(tǒng)是在轉(zhuǎn)向軸與轉(zhuǎn)向器之間加裝一組如圖4所示的雙排行星齒輪機(jī)構(gòu)[4],其行星齒輪布置簡圖如圖 1所示。該主動(dòng)式轉(zhuǎn)向系統(tǒng)是通過鎖止器實(shí)現(xiàn)對大太陽輪或行星架的鎖止?fàn)顟B(tài)來改變變速傳動(dòng)裝置的傳動(dòng)比。當(dāng)車輛在起步或較低車速范圍內(nèi)行駛時(shí),大太陽輪和行星架同時(shí)處于鎖死狀態(tài),整個(gè)行星齒輪組作為一個(gè)整體機(jī)構(gòu)同步運(yùn)轉(zhuǎn),實(shí)現(xiàn)直接轉(zhuǎn)向傳動(dòng)比;當(dāng)車輛行駛至中速范圍區(qū)間時(shí),大太陽輪處于鎖死狀態(tài),小太陽輪作為主動(dòng)件驅(qū)動(dòng)長短行星輪隨行星架一起同步轉(zhuǎn)動(dòng),進(jìn)而驅(qū)動(dòng)齒圈及齒圈輸出架一起隨小太陽輪同向轉(zhuǎn)動(dòng),以實(shí)現(xiàn)相同的轉(zhuǎn)向盤轉(zhuǎn)角輸入對應(yīng)相對較小的轉(zhuǎn)向輪轉(zhuǎn)向角,以滿足車輛行駛的轉(zhuǎn)向操控輕便性和穩(wěn)定性需求;當(dāng)車輛行駛至中高速及以上范圍區(qū)間時(shí),行星架處于鎖死狀態(tài),小太陽輪作為主動(dòng)件驅(qū)動(dòng)長短行星輪自轉(zhuǎn),長行星輪驅(qū)動(dòng)齒圈及齒圈輸出架一起隨小太陽輪同向轉(zhuǎn)動(dòng),以實(shí)現(xiàn)相同的轉(zhuǎn)向盤轉(zhuǎn)角輸入對應(yīng)最小的轉(zhuǎn)向輪轉(zhuǎn)向角,以滿足車輛行駛的轉(zhuǎn)向操控穩(wěn)定性需求。
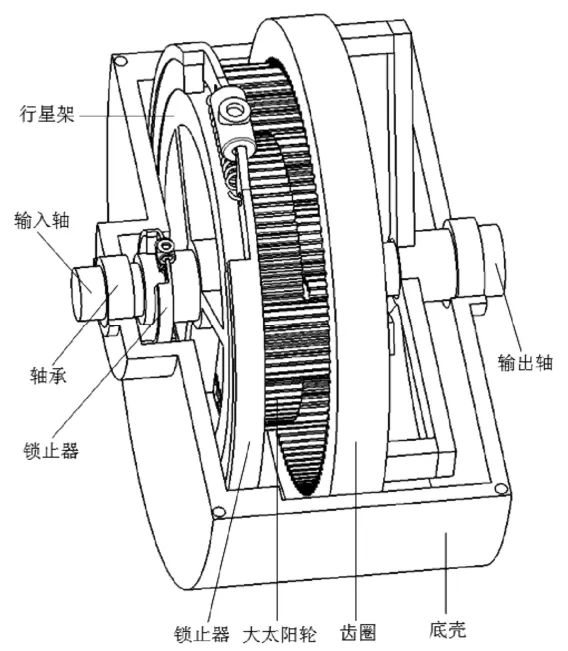
圖4 雙排行星齒輪變速傳動(dòng)裝置結(jié)構(gòu)圖
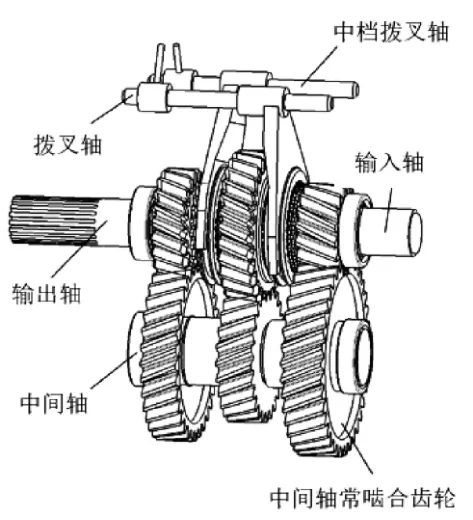
圖5 齒輪變速傳動(dòng)裝置結(jié)構(gòu)圖
基于齒輪變速傳動(dòng)裝置實(shí)現(xiàn)的一種主動(dòng)式轉(zhuǎn)向系統(tǒng)是在轉(zhuǎn)向軸與轉(zhuǎn)向器之間加裝一組如圖5所示的齒輪變速傳動(dòng)裝置[5],齒輪變速是由如圖6所示的換擋驅(qū)動(dòng)結(jié)構(gòu)來完成的。當(dāng)車輛在低速范圍下行駛時(shí),傳動(dòng)變速箱內(nèi)的同步器處于初始位置,輸入軸與輸出軸連接為一體,此時(shí)可實(shí)現(xiàn)直接轉(zhuǎn)向傳動(dòng)比;當(dāng)車輛由低速行駛到中高速范圍時(shí),步進(jìn)電機(jī)通過減速齒輪組驅(qū)動(dòng)換擋鼓轉(zhuǎn)動(dòng),撥叉銷將會(huì)隨滑槽的轉(zhuǎn)動(dòng)而沿軸向方向滑移,此時(shí)相同工況下的方向盤角輸入對應(yīng)相對較小的轉(zhuǎn)向輪轉(zhuǎn)向角,以滿足車輛行駛的操縱方便和穩(wěn)定性需求。
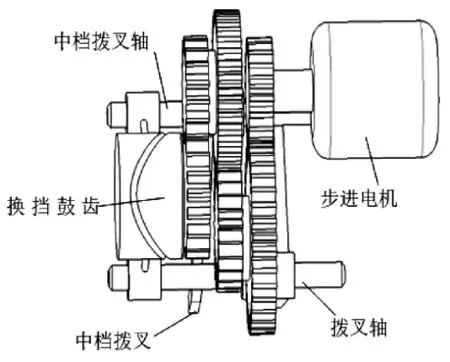
圖6 換擋驅(qū)動(dòng)結(jié)構(gòu)圖
變速傳動(dòng)裝置的增設(shè)改變了轉(zhuǎn)向系統(tǒng)從轉(zhuǎn)向盤到轉(zhuǎn)向器的轉(zhuǎn)向傳動(dòng)比,保障了車輛不同車速下行駛時(shí)的轉(zhuǎn)向傳動(dòng)比需求,很好地解決了車輛在低速行駛時(shí)的靈活性問題與車輛在高速行駛時(shí)的穩(wěn)定性問題。
3 結(jié)論
論文基于齒輪變速傳動(dòng)裝置和行星齒輪變速傳動(dòng)裝置實(shí)現(xiàn)的主動(dòng)式轉(zhuǎn)向系統(tǒng),均實(shí)現(xiàn)了汽車行駛過程中的轉(zhuǎn)向傳動(dòng)比可變,保障不同車速下相同轉(zhuǎn)向盤轉(zhuǎn)角輸入下對應(yīng)不同的轉(zhuǎn)向輪轉(zhuǎn)角,滿足車輛行駛中低速下的轉(zhuǎn)向輕便性和高速下的轉(zhuǎn)向穩(wěn)定性需求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
