共享任務(wù)對(duì)汽車安全性和軟件可用性的影響
2021-06-06 08:42:42景春暉支錦亦
西南交通大學(xué)學(xué)報(bào) 2021年2期
景春暉 ,支錦亦
(西南交通大學(xué)建筑與設(shè)計(jì)學(xué)院,四川 成都 611756)
駕駛時(shí)使用手機(jī)對(duì)駕駛安全有重大影響[1-6],司機(jī)在使用手機(jī)過程中出車禍的概率為42%[7]. 反向來看,駕駛?cè)蝿?wù)也對(duì)手機(jī)交互可用性產(chǎn)生了影響,即“逆向效應(yīng)”[8-11]. 如今,由于以汽車共享經(jīng)濟(jì)為代表的“零工經(jīng)濟(jì)”(gig economy)的出現(xiàn),開車時(shí)使用手機(jī)的情況更加有所增加[12]. 中國國家信息中心共享經(jīng)濟(jì)研究中心發(fā)布的《2019年度中國共享經(jīng)濟(jì)年度報(bào)告》[13]提到,2015年—2018年網(wǎng)上出租車乘客數(shù)量從9.5%增加到36.3%. 截至2018年底,滴滴出行已連接4.5億多乘客和2100萬司機(jī),每天收到74.3億份訂單,完成2500多萬份訂單,服務(wù)城市超過400個(gè). 這將導(dǎo)致一系列與手機(jī)分心駕駛(mobile phone distracted driving,MPDD)和雙任務(wù)干擾相關(guān)的問題[11]. 然而,目前關(guān)于汽車共享任務(wù)的研究較少. 關(guān)于車內(nèi)使用手機(jī)的研究主要集中在通話任務(wù)上(近60%),其次是發(fā)短信任務(wù)(近38%)[11]. 因此,亟需關(guān)于共享汽車軟件對(duì)駕駛安全性和交互可用性的研究.
目前,關(guān)于車內(nèi)使用手機(jī)的研究主要集中在手機(jī)交互任務(wù)對(duì)駕駛安全性的影響上. 例如,執(zhí)行音樂搜索或?qū)Ш饺蝿?wù)對(duì)駕駛員視覺注意力和駕駛能力的影響[12-15],免提和手持移動(dòng)電話對(duì)駕駛性能的影響等[16]. 在車內(nèi)使用手機(jī)會(huì)增加反應(yīng)時(shí)間[17-18],損害視覺注意力分布[19-20],減少車道變換頻率[21],增加跟車距離[18],以及降低行駛速度[22]等. 這些干擾都將導(dǎo)致駕駛安全風(fēng)險(xiǎn)的增加.
但近年來,對(duì)逆向效應(yīng)的研究開始出現(xiàn)[11]. 保持車輛橫向控制穩(wěn)定將導(dǎo)致人的語言交互能力的降低[8],駕駛會(huì)影響手機(jī)的交互響應(yīng)時(shí)間[23],駕駛?cè)蝿?wù)會(huì)影響發(fā)短信的準(zhǔn)確性[10]. 然而,目前,類似的研究還遠(yuǎn)遠(yuǎn)少于駕駛安全性的研究,因此有必要在進(jìn)行駕駛安全性研究的同時(shí)進(jìn)行交互可用性研究.
在現(xiàn)有研究中,駕駛安全性可以用以下變量反映:速度偏差(使用手機(jī)會(huì)導(dǎo)致更高的速度偏差和橫向加速度可變性)[11,24]、車速(開車時(shí)說話/撥號(hào)/發(fā)短信會(huì)導(dǎo)致速度降低)[11]、制動(dòng)響應(yīng)時(shí)間和剎車時(shí)間[25-29]、駕駛錯(cuò)誤[30]、認(rèn)知負(fù)荷[31]、方向盤修正量[32]等. 為了在汽車共享任務(wù)中確定這些變量的表現(xiàn),本研究選取車速、駕駛錯(cuò)誤、方向盤修正次數(shù)以及制動(dòng)時(shí)間等參數(shù)作為駕駛安全性變量. 對(duì)于反映交互可用性的變量,Harrison等[33]指出最常見的可用性變量是有效性、效率和滿意度(超過50%). 另外,認(rèn)知負(fù)荷也被認(rèn)為是可用性的一個(gè)重要方面[34]. 交互時(shí)間和交互錯(cuò)誤也可以被用作衡量交互績效[35]. 因此,本研究選取交互錯(cuò)誤(效度)、交互時(shí)間(效率)、滿意度、認(rèn)知負(fù)荷作為交互可用性變量.
如Choudhary等[36]所述,目前關(guān)于手機(jī)和駕駛相互影響的研究大多在發(fā)達(dá)國家開展,在發(fā)展中國家開展的工作很少. 然而,在發(fā)展中國家駕駛時(shí)使用手機(jī)的情況非常常見[1]. 此外,種族、習(xí)慣和文化因素會(huì)導(dǎo)致交互和駕駛表現(xiàn)的不同. 例如,Nakano等[37]指出美國和日本用戶在搜索習(xí)慣和搜索速度上就存在差異. 因此,有必要在中國(人口最多的發(fā)展中國家)進(jìn)行研究.
綜上,關(guān)于汽車共享的駕駛安全性和交互可用性研究面臨以下問題:
1) 在駕駛時(shí)使用汽車共享軟件是否會(huì)對(duì)駕駛安全性產(chǎn)生影響;
2) 逆向來看,駕駛?cè)蝿?wù)是否會(huì)影響汽車共享軟件的交互可用性績效;
3) 影響的績效指標(biāo)和影響機(jī)制尚不明確.
1 研究方法
1.1 試驗(yàn)材料
研究采用現(xiàn)場觀察和問卷的方法對(duì)30名經(jīng)驗(yàn)豐富的中國司機(jī)進(jìn)行了調(diào)查. 駕駛員的年齡為20~45歲(均值為36.56歲,標(biāo)準(zhǔn)差為5.24歲). 被試對(duì)汽車共享軟件的交互流程進(jìn)行了排序,共獲得11項(xiàng)主要功能,包括呼叫乘客、個(gè)人信息、訂購等. 參與者通過排序最終確定了3個(gè)最常見的功能,對(duì)應(yīng)試驗(yàn)交互任務(wù)T1~T3:接單(任務(wù)T1)、確認(rèn)信息(乘客信息、目的地等)(任務(wù)T2)、目的地搜索(通過平移或縮放確定手機(jī)屏幕地圖上的目標(biāo)位置)(任務(wù)T3).開發(fā)了3個(gè)試驗(yàn)測試demo,如圖1所示.
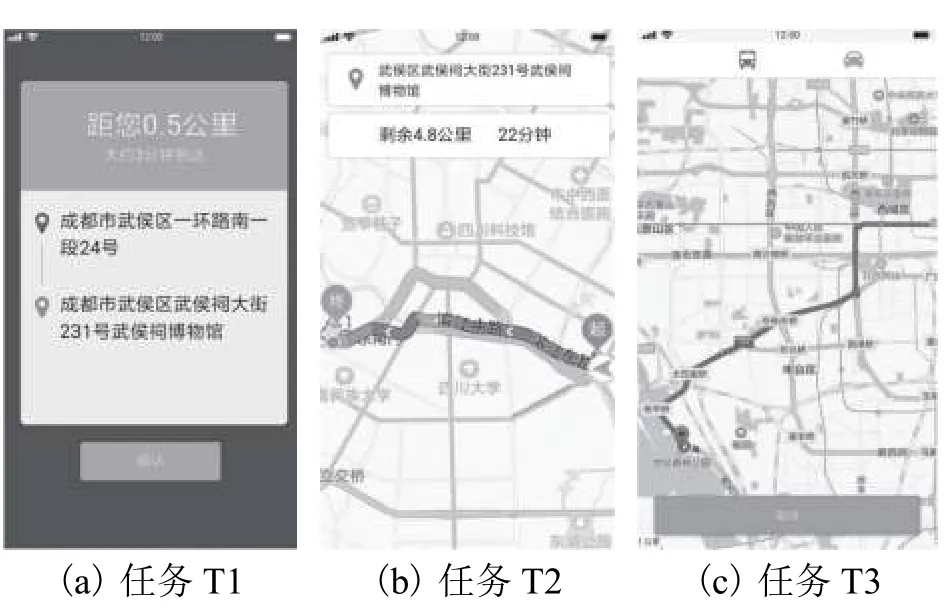
圖1 試驗(yàn)demo界面Fig. 1 Three experimental demo interfaces
1.2 實(shí)證研究
1.2.1 參與者
研究招募了24名熟練使用滴滴出行軟件的司機(jī)作為參與者,均為20~45歲(均值為33.43歲,標(biāo)準(zhǔn)差為6.32歲)的右撇子男性,每周駕駛3次以上,每天駕駛10 h以上,持續(xù)5年以上(司機(jī)擁有足夠的經(jīng)驗(yàn),從而消除經(jīng)驗(yàn)不足引發(fā)的影響). 所有被試都身體健康,視力正常,駕駛小型手動(dòng)車,并且有使用汽車共享軟件的經(jīng)驗(yàn). 為了排除年齡對(duì)感知可用性的潛在影響,選擇了相同年齡組的參與者[12].
1.2.2試驗(yàn)設(shè)備與環(huán)境
本文選用駕駛模擬器而不是在真實(shí)環(huán)境中進(jìn)行試驗(yàn)研究. 盡管有研究認(rèn)為模擬器缺乏真實(shí)感[11],但模擬器較為安全,控制駕駛參數(shù)很容易[32]. 此外,駕駛模擬器的效度并不比真車自然駕駛差[7].
在MPDD相關(guān)研究中,駕駛模擬器試驗(yàn)的道路環(huán)境大都選擇了雙車道道路[6,32],文本選取一條模擬中國城市的雙車道道路作為試驗(yàn)道路. 道路負(fù)荷較低,從而避免對(duì)駕駛的意外影響. 根據(jù)中國市區(qū)道路法規(guī),最高車速限制為60 km/h[38].
使用的手機(jī)為5.7英寸(1920像素 × 1080像素)觸摸屏,使用滴滴司機(jī)常用的可旋轉(zhuǎn)手機(jī)支架架設(shè)在滴滴司機(jī)最常放置的位置:右側(cè)空調(diào)出風(fēng)口處,如圖2所示.

圖2 試驗(yàn)設(shè)備Fig. 2 Experimental equipment
此外,還使用了調(diào)查問卷、高清攝像機(jī)和筆記本電腦等設(shè)備.
1.2.3 測試內(nèi)容
因變量包括駕駛安全性變量和交互可用性變量.
駕駛安全性變量包括制動(dòng)響應(yīng)時(shí)間、制動(dòng)停車時(shí)間、車速、認(rèn)知負(fù)荷、方向盤修正幅度和次數(shù)、駕駛錯(cuò)誤. 制動(dòng)響應(yīng)時(shí)間為司機(jī)自收到制動(dòng)信號(hào)到做出制動(dòng)動(dòng)作的時(shí)間;制動(dòng)停車時(shí)間為司機(jī)在做出制動(dòng)反應(yīng)后到車輛減速至20 km/h的時(shí)間;車速為司機(jī)執(zhí)行任務(wù)時(shí)的車輛平均速度;認(rèn)知負(fù)荷是通過NASATLX量表確定[39];方向盤校正幅度和次數(shù)分別為駕駛員在10 s內(nèi)執(zhí)行交互任務(wù)時(shí)調(diào)整方向盤的平均角度和總次數(shù);駕駛錯(cuò)誤為檢測到的車輛越過道路基線的次數(shù).
交互可用性變量包括交互時(shí)間(效率)、交互錯(cuò)誤(效度)、認(rèn)知負(fù)荷和滿意度. 交互時(shí)間為完成交互任務(wù)所需的時(shí)間;交互錯(cuò)誤為交互任務(wù)執(zhí)行錯(cuò)誤的次數(shù);認(rèn)知負(fù)荷和滿意度分別使用認(rèn)知負(fù)荷問卷和滿意度問卷[40]確定.
1.2.4 試驗(yàn)任務(wù)和程序
1) 任務(wù)T1:參與者在收到開始命令后,查看手機(jī)屏幕上顯示的文字信息,當(dāng)信息被確認(rèn)后,點(diǎn)擊“確認(rèn)”按鈕;按鈕被點(diǎn)擊后信息消失(圖1(a));此任務(wù)需要少量手指和視覺交互.
2) 任務(wù)T2:參與者在收到開始命令后,在駕駛的同時(shí)通過手機(jī)屏幕檢查路線信息(路線信息提供了距離目標(biāo)的距離和路線的方向等信息)(圖1(b));此任務(wù)只需要視覺交互但是需要記住相關(guān)信息.
3) 任務(wù)T3:參與者在駕駛時(shí)收到開始命令后,立即查看手機(jī)屏幕上的目的地信息,目的地在屏幕外,因此參與者應(yīng)通過拖動(dòng)或縮放(基于個(gè)人習(xí)慣)將標(biāo)記的目的地圖標(biāo)移動(dòng)到屏幕內(nèi)[41](圖1(c));這項(xiàng)任務(wù)需要相對(duì)較多的手指和視覺交互.
試驗(yàn)步驟如下:
步驟1收集被試的基本信息,如駕齡、年齡、性別、駕駛習(xí)慣、車型、汽車共享軟件使用經(jīng)驗(yàn)等.
步驟2告知被試駕駛和交互任務(wù),并訓(xùn)練15 min以便熟悉交互任務(wù)和駕駛?cè)蝿?wù). 當(dāng)被試完成駕駛互動(dòng)任務(wù)后,需要完成認(rèn)知負(fù)荷和滿意度量表.
步驟3調(diào)整手機(jī)位置和座椅位置. 當(dāng)汽車處于停車狀態(tài)時(shí),對(duì)參與者進(jìn)行T1~T3測試,每項(xiàng)任務(wù)完成后,完成認(rèn)知負(fù)荷量表和滿意度量表.
步驟4在中國典型的低交通負(fù)荷城市雙車道道路上以40~50 km/h的正常速度行駛. 在正常駕駛5 min后,被試在駕駛狀態(tài)下依次接受T1~T3任務(wù)測試. 每項(xiàng)任務(wù)完成后,完成認(rèn)知負(fù)荷量表和滿意度量表.
步驟5為避免固定試驗(yàn)順序?qū)υ囼?yàn)結(jié)果的影響,被試的試驗(yàn)順序不同.
在試驗(yàn)數(shù)據(jù)基礎(chǔ)上,采用配對(duì)樣本t檢驗(yàn)方法,考察了汽車共享任務(wù)對(duì)交互可用性和駕駛安全性的影響.
2 交互可用性
2.1 交互時(shí)間
對(duì)停車交互和駕駛中交互兩種狀態(tài)下的交互時(shí)間進(jìn)行了比較.t檢驗(yàn)結(jié)果為:任務(wù)T1的t值為2.650,P值為0.014;任務(wù)T2的t值為4.826,P值為0;任務(wù)T3的t值為2.937,P值為0.007;說明停車和駕駛中的交互時(shí)間均存在顯著差異. 如圖3所示,在任務(wù)T1~T3中,駕駛中的交互時(shí)間比停車狀態(tài)下的交互時(shí)間長24%~87%,這說明駕駛行為在所有交互場景中都會(huì)顯著增加交互時(shí)間.
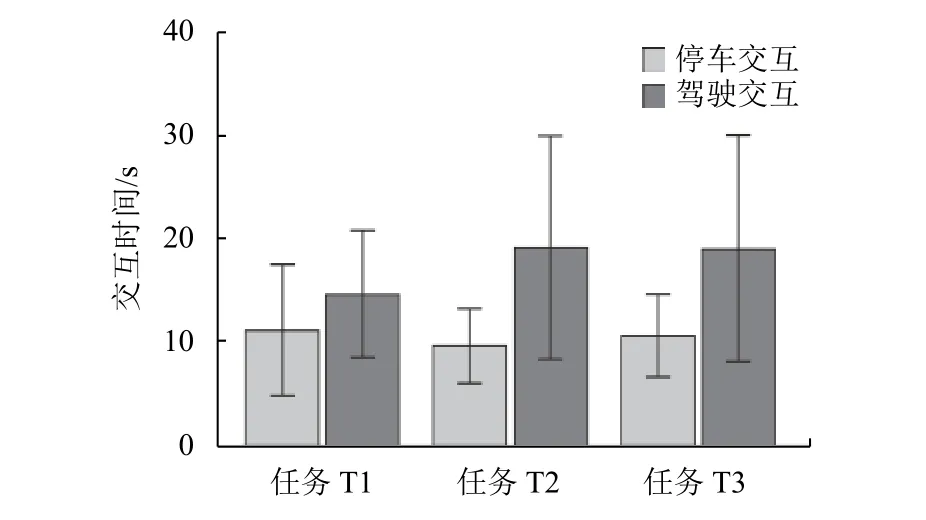
圖3 交互時(shí)間Fig. 3 Interaction time
2.2 滿意度
對(duì)停車交互和駕駛中交互兩種狀態(tài)下的滿意度進(jìn)行比較,t檢驗(yàn)結(jié)果為:任務(wù)T1的t值為3.246,P值為0.014,任務(wù)T2的t值為2.807,P值為0.010;這反映出在任務(wù)T1和T2中,停車交互與駕駛中交互的滿意度存在顯著差異. 如圖4所示,任務(wù)T1在駕駛交互時(shí)的滿意度為6.597 ± 2.539,低于停車交互時(shí)的滿意度7.758 ± 2.294;任務(wù)T2在駕駛交互時(shí)的滿意度為6.404 ± 2.660,低于停車交互時(shí)的滿意度7.571 ± 2.237. 駕駛交互時(shí)的滿意度比停車交互時(shí)降低了15%,這說明駕駛分心和認(rèn)知負(fù)荷的增加會(huì)造成主觀滿意度的降低. 但在任務(wù)T3中停車交互和駕駛中交互的主觀滿意度沒有顯著差異,結(jié)合試驗(yàn)后的用戶訪談發(fā)現(xiàn),這可能是因?yàn)樵诓僮魅蝿?wù)T3時(shí)需要較多的視覺瀏覽和手指交互,較為復(fù)雜,即使在停車狀態(tài)下也占用了用戶相當(dāng)大的注意力,因此用戶難以通過主觀感覺分辨停車狀態(tài)和駕駛狀態(tài)下的滿意度差異.
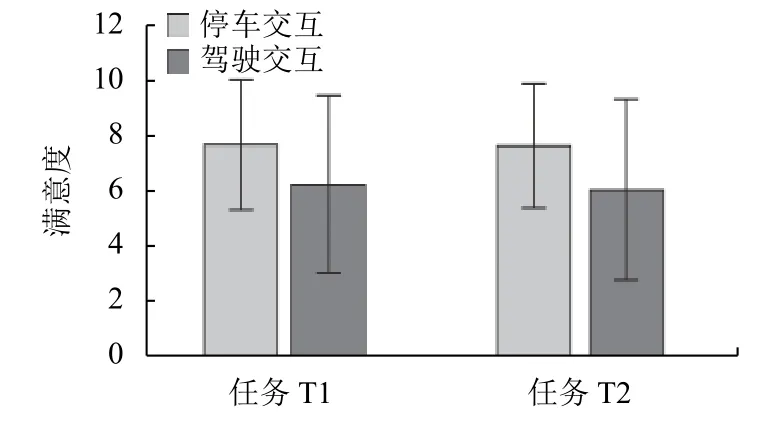
圖4 滿意度Fig. 4 Satisfaction rating
2.3 認(rèn)知負(fù)荷
對(duì)停車交互和駕駛交互兩種狀態(tài)下的認(rèn)知負(fù)荷進(jìn)行比較,t檢驗(yàn)結(jié)果為:任務(wù)T2的t值為3.309,P值為0.003,任務(wù)T3的t值為4.895,P值為0;這反映出在任務(wù)T2和T3中,停車交互與駕駛中交互的認(rèn)知負(fù)荷存在顯著差異. 如圖5所示,任務(wù)T2在駕駛交互時(shí)的認(rèn)知負(fù)荷為4.022 ± 2.670,高于停車交互時(shí)的認(rèn)知負(fù)荷3.024 ± 2.042;任務(wù)T3在駕駛交互時(shí)的認(rèn)知負(fù)荷為4.108 ± 2.347,高于停車交互時(shí)的認(rèn)知負(fù)荷2.550 ± 1.665,駕駛狀態(tài)下的認(rèn)知負(fù)荷比停車狀態(tài)增加了33%~61%. 這說明駕駛行為會(huì)造成認(rèn)知負(fù)荷的增加.
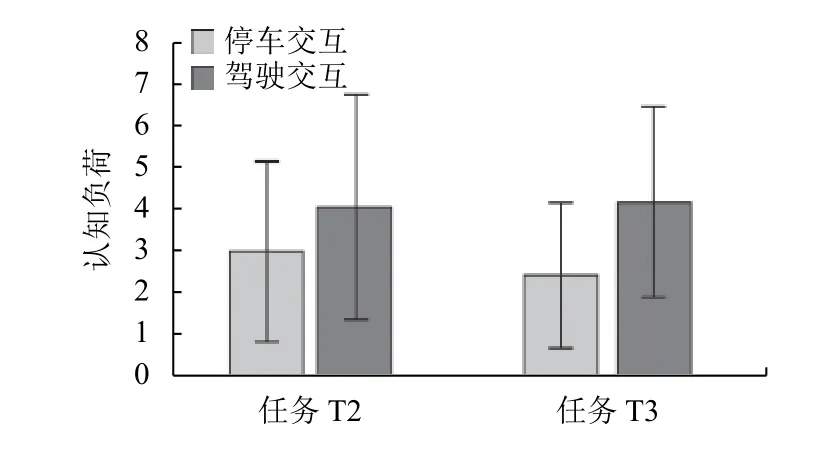
圖5 認(rèn)知負(fù)荷Fig. 5 Cognitive load
2.4 交互錯(cuò)誤
對(duì)停車交互和駕駛中交互兩種狀態(tài)下的交互錯(cuò)誤比較發(fā)現(xiàn):各任務(wù)中的交互錯(cuò)誤都不存在顯著差異.
3 駕駛安全性
3.1 車速
對(duì)駕駛不操作軟件(driving without operating software,DWOS)、駕駛的同時(shí)操作軟件(operating software while driving,OSWD)兩種狀態(tài)下的車速進(jìn)行了比較. 結(jié)果發(fā)現(xiàn),任務(wù)T2的t檢驗(yàn)結(jié)果為:t值為2.257,P值為0.034,車速存在顯著差異. 如圖6所示,在DWOS狀態(tài)下的車速為(50.40 ± 5.36) km/h,高于在OSWD狀態(tài)下的車速(46.54 ± 7.16) km/h.這說明駕駛時(shí)操作軟件會(huì)導(dǎo)致車速的降低,這可能是因?yàn)樗緳C(jī)意識(shí)到了風(fēng)險(xiǎn)而采取的補(bǔ)償措施[9,23].
3.2 方向盤調(diào)整角度、方向盤調(diào)整次數(shù)
對(duì)DWOS、OSWD狀態(tài)下的方向盤調(diào)整角度和調(diào)整次數(shù)進(jìn)行了比較.
方向盤調(diào)整角度的t檢驗(yàn)結(jié)果為:任務(wù)T1的t值為2.255,P值為0.034,任務(wù)T2的t值為3.037,P值為0.006,任務(wù)T3的t值為4.213,P值為0. 任務(wù)T1~T3在 OSWD、DWOS兩種狀態(tài)下均存在顯著差異. 如圖7所示, OSWD狀態(tài)下比DWOS狀態(tài)下的方向盤調(diào)整角度增加了25%~66%.
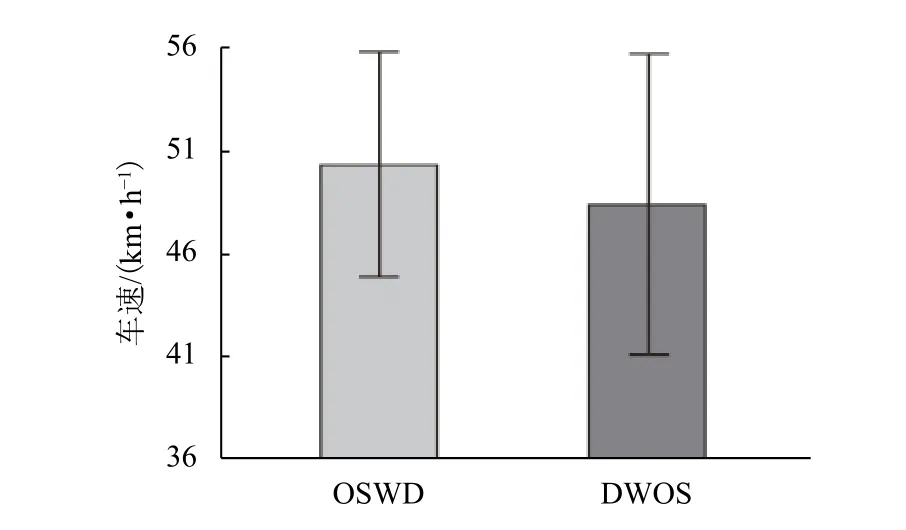
圖6 任務(wù)T2的車速Fig. 6 Driving speed of task T2
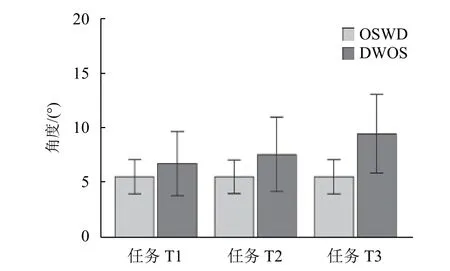
圖7 方向盤調(diào)整角度Fig. 7 Steering wheel adjustment angle
方向盤調(diào)整次數(shù)的t檢驗(yàn)結(jié)果為:任務(wù)T1的t值為2.731,P值為0.012,任務(wù)T3的t值為4.513,P值為0. 如表1所示,OSWD狀態(tài)下比DWOS狀態(tài)下的方向盤調(diào)整次數(shù)增加了217%~761%,這說明駕駛時(shí)操作軟件對(duì)于司機(jī)控制方向盤的能力有顯著影響.
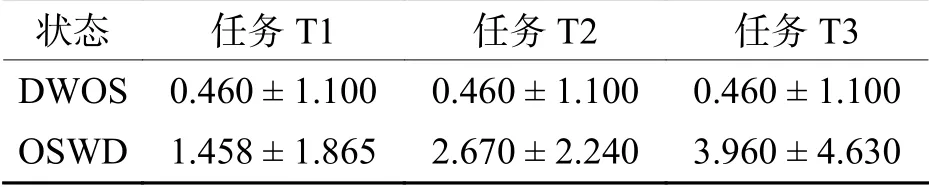
表 1 方向盤調(diào)整次數(shù)Tab. 1 Times of adjusting steering wheel 次
3.3 駕駛錯(cuò)誤
DWOS、OSWD狀態(tài)下的駕駛錯(cuò)誤的t檢驗(yàn)結(jié)果為:任務(wù)T1~T3的P值均為0,t值分別為4.764、5.572、5.264;說明任務(wù)T1~T3在DWOS、OSWD狀態(tài)下均存在顯著差異. 如表2所示,在OSWD狀態(tài)下的駕駛錯(cuò)誤比在DWOS狀態(tài)下的駕駛錯(cuò)誤增加了512%~1053%,這說明駕駛時(shí)操作軟件容易導(dǎo)致司機(jī)駕駛錯(cuò)誤的出現(xiàn).
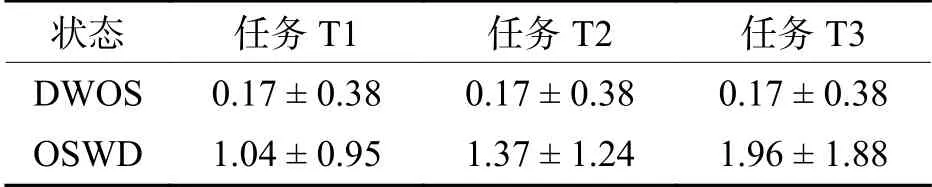
表2 駕駛錯(cuò)誤Tab. 2 Driving errors 次
3.4 反應(yīng)時(shí)間和制動(dòng)時(shí)間
對(duì)DWOS、OSWD兩種狀態(tài)下的反應(yīng)時(shí)間和制動(dòng)時(shí)間進(jìn)行了比較. 結(jié)果發(fā)現(xiàn),任務(wù)T3的t檢驗(yàn)結(jié)果為t值為2.585,P值為0.017,DWOS、OSWD兩種狀態(tài)存在顯著差異. 如圖8所示,OSWD狀態(tài)下的反應(yīng)時(shí)間比DWOS狀態(tài)下增加了45%. 具體來看,任務(wù)T3在OSWD狀態(tài)下的反應(yīng)時(shí)間為(0.81 ±0.52) s,高于在DWOS狀態(tài)下的反應(yīng)時(shí)間(0.56 ±0.32) s. 這可能是因?yàn)槿蝿?wù)T3相對(duì)任務(wù)T1和T2更為復(fù)雜,有較多的離開方向盤的手指交互操作和視覺瀏覽操作,這說明交互壓力更大的任務(wù)會(huì)更為顯著的影響制動(dòng)反應(yīng)時(shí)間. 對(duì)于制動(dòng)時(shí)間來說,在各任務(wù)中都不存在顯著差異.
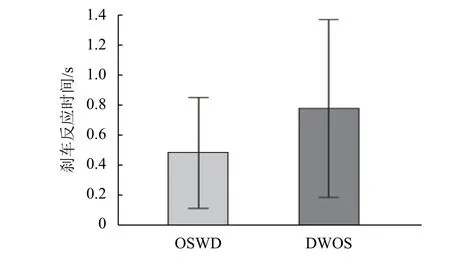
圖8 任務(wù)T3的反應(yīng)時(shí)間Fig. 8 Reaction time of task T3
4 結(jié) 論
1) 在駕駛狀態(tài)下操作汽車共享軟件會(huì)顯著影響手機(jī)交互績效. 具體來看,會(huì)導(dǎo)致駕駛員交互時(shí)間增加、滿意度降低和認(rèn)知負(fù)荷增加,但不會(huì)導(dǎo)致交互錯(cuò)誤的增加.
2) 此外,發(fā)現(xiàn)相對(duì)駕駛時(shí)不操作軟件,駕駛時(shí)操作軟件會(huì)顯著影響駕駛安全性. 具體表現(xiàn)為制動(dòng)反應(yīng)時(shí)間增加、方向盤保持能力的下降、駕駛錯(cuò)誤的增加、車速的降低. 但如果司機(jī)已經(jīng)做出制動(dòng)反應(yīng)行為后,在制動(dòng)時(shí)間上,駕駛的同時(shí)是否操作軟件沒有顯著差異. 這說明汽車共享軟件導(dǎo)致的駕駛分心只影響反應(yīng)時(shí)間,而不會(huì)影響制動(dòng)行為. 但更為具體的影響機(jī)制還需要進(jìn)一步研究確定.
本研究的結(jié)果能為汽車共享軟件的智能化設(shè)計(jì)、汽車共享軟件場景中的駕駛安全性補(bǔ)償設(shè)計(jì)提供理論借鑒,也可為汽車共享駕駛員的準(zhǔn)入和培訓(xùn)標(biāo)準(zhǔn)提供一定參考.
致謝:西南交通大學(xué)美國研究中心2020年度項(xiàng)目(ARC2020006);工效學(xué)會(huì)-津發(fā)優(yōu)秀青年學(xué)者聯(lián)合研究基金(CES-Kingfar-2019-001)資助.
猜你喜歡
工會(huì)博覽(2023年3期)2023-04-06 15:52:34
現(xiàn)代儀器與醫(yī)療(2022年2期)2022-08-11 09:51:40
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
汽車工程師(2021年12期)2022-01-18 06:02:43
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
小康(2021年7期)2021-03-15 05:29:03
科技傳播(2019年22期)2020-01-14 03:06:54
活力(2019年19期)2020-01-06 07:34:38
雜文月刊(2019年15期)2019-09-26 00:53:54
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24