視覺的機器人分揀系統的設計與研究
2021-06-08 14:32:13鄭燦香
中國新通信 2021年3期
鄭燦香

【摘要】? ? 現在事情都會用機器人代替人工,如同分揀工作中的物料識別和定位都是通過機器視覺結合工業機器人,對于動物視覺的定位方法和物料測距問題的提出。其主要工作原理就是根據工業機器人末端的攝像頭移動后產生的,主要是對不同坐標、不同位置作出連續單點拍攝,然后獲得與眼睛視覺測距的重要參數,從而保證了運動測距和定位功能的實現。
【關鍵詞】? ? 視覺庫? ? 機器人? ? 分揀系統? ? 自動? ? 識別
引言
現在我國生產制造業開始向柔性加工方向發展。我國工業機器人開始到自動化生產線中進行工作,使用最多的是器械物料裝配、碼垛、焊接等場景。機器人的使用降低了生產成本,并有效提高了企業柔性加工生產水平。
為進一步加強工業機器人的加工柔韌性,必須要提升工業機器人的自主性。將機器視覺技術應用于工業機器人上,可以設計出基于機器視覺的自動分揀系統。該系統可以有效提高分揀成功率,能為企業做出更大的貢獻。
本文從攝像頭彈幕測量、雙目測距以及運動立體測距原理進行分析,然后對當下固定式單目相機自動分揀系統中得到單目移動視覺的測距方法和定位方法進行論述,還通過相關實驗實現了產品位置和特征的識別,為機器人的抓取提供了具體坐標。
一、攝像頭測距原理
1.1單目測量
圖1為單目相機成像的基本原理,這種原理的性質與三角形相近。
由圖1所示,攝像機到拍攝屏幕的距離用d表示,攝像機的焦距用f表示。將拍攝物體擺放到拍攝平面,拍攝物體的物理長度為L,則成像后的長度則表示為L。因此,單目像機的成像過程可以表示為:
為了更好的表示拍攝物體與成像物體之間的關系,特建立了四個坐標系。四個坐標系分別為圖像像素坐標系Cp,圖像物理坐標系C,相機坐標系Cc和世界坐標系Cw。因此,物體和圖像之間的關系可以如公式(2)所示。
如公式(4)表示,xw,yw,zw是世界坐標系的三個維度,其主要用來表示相機的位置。R表示一個旋轉矩陣,而T表示一個平移矩陣。
所以,如果我們把世界坐標系融入到圖像像素坐標系會得到什么,如公式(5)所示:
單目測距是根據現實生活中標定物進行世界坐標向圖像坐標的方向進行轉變,當我們知曉Zc的特質后我們就可以通過相機圖像中對實際事物圖片其中的一個點進行空間位置的確認。可是,一旦相機焦距確定后,那么圖像中物體更深層次的信息就不能得到解釋[3]。
1.2雙目測距
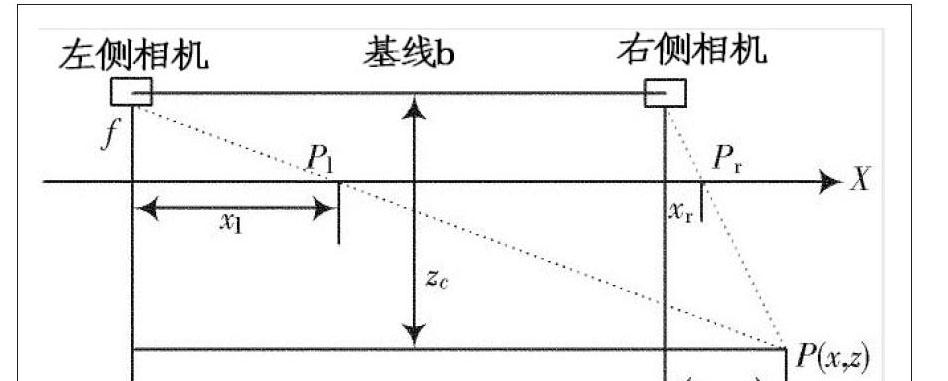
圖2是雙目測距的原理。其實雙目相機與人類眼睛是一樣的,因此,雙目小雞是通過眼睛視覺差下的深度相機,將相機安裝在物體的左邊和郵編,然后根據成像視覺差對世界坐標系統的雙目相機和觀測點的距離行計算。
在左側和右側分別放置一臺相機,沿著兩臺相機的中點畫一條線-基線b。假設物體為P(xc,zc),那么該物體的投影點分別為pl(xl,yl),pr(xr,yr)。因此,物體與像之間的關系可以如公式(6)所示:
通過公式(7)可以看出深度(z)和視覺差值(xl-xr)之間的關系是反比關系。視覺差結果會由距離的遠近決定。通過移位差x得到相機像素就越高,水平位移的精準度就越高,所以,如果距離是一樣的那么測距的精準度就越高。
1.3運動立體測距
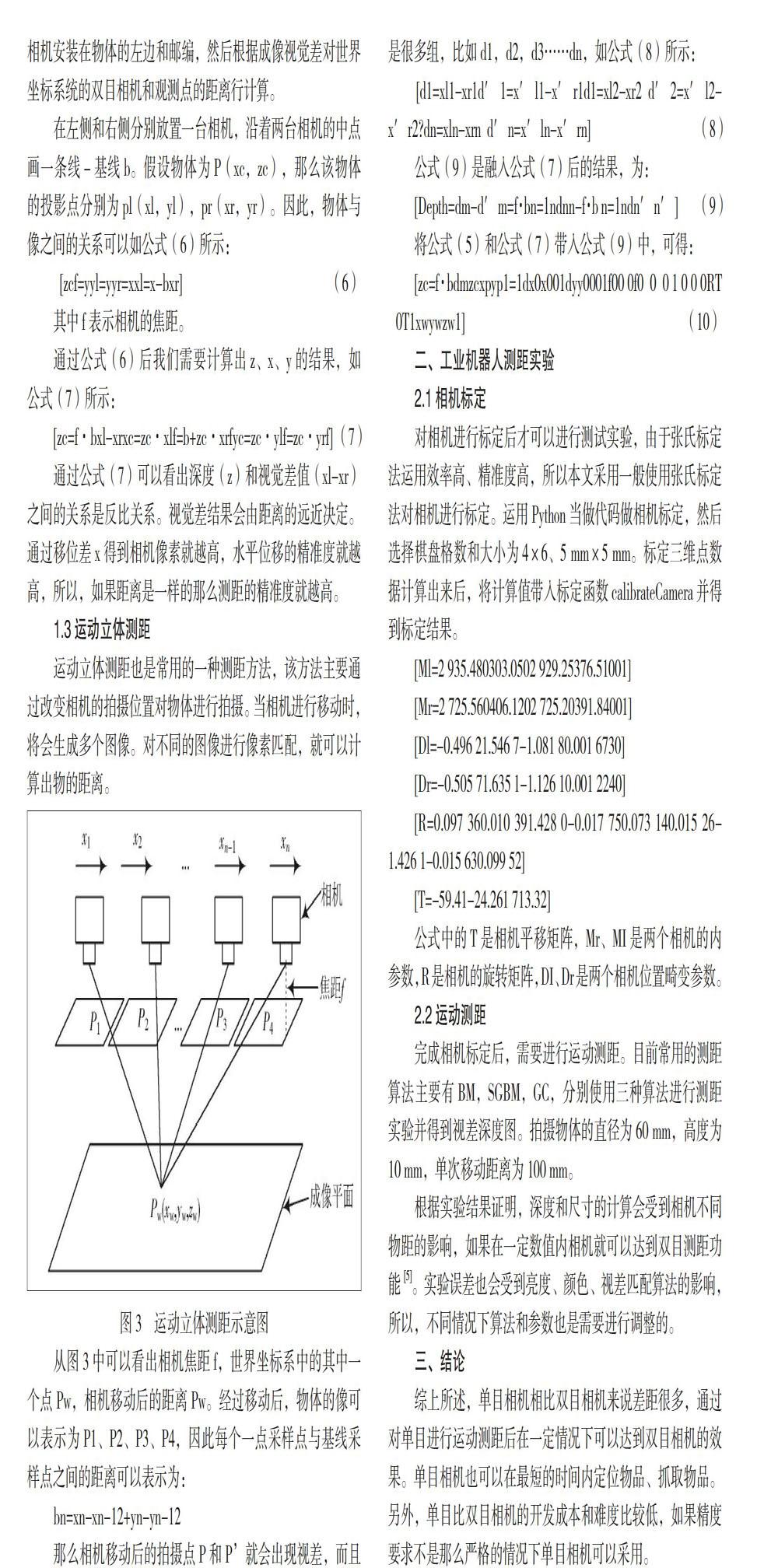
運動立體測距也是常用的一種測距方法,該方法主要通過改變相機的拍攝位置對物體進行拍攝。當相機進行移動時,將會生成多個圖像。對不同的圖像進行像素匹配,就可以計算出物的距離。
從圖3中可以看出相機焦距f,世界坐標系中的其中一個點Pw,相機移動后的距離Pw。經過移動后,物體的像可以表示為P1、P2、P3、P4,因此每個一點采樣點與基線采樣點之間的距離可以表示為:
二、工業機器人測距實驗
2.1相機標定
對相機進行標定后才可以進行測試實驗,由于張氏標定法運用效率高、精準度高,所以本文采用一般使用張氏標定法對相機進行標定。運用Python當做代碼做相機標定,然后選擇棋盤格數和大小為4×6、5 mm×5 mm。標定三維點數據計算出來后,將計算值帶入標定函數calibrateCamera并得到標定結果。
2.2運動測距
完成相機標定后,需要進行運動測距。目前常用的測距算法主要有BM,SGBM,GC,分別使用三種算法進行測距實驗并得到視差深度圖。拍攝物體的直徑為60 mm,高度為10 mm,單次移動距離為100 mm。
根據實驗結果證明,深度和尺寸的計算會受到相機不同物距的影響,如果在一定數值內相機就可以達到雙目測距功能[5]。實驗誤差也會受到亮度、顏色、視差匹配算法的影響,所以,不同情況下算法和參數也是需要進行調整的。
三、結論
綜上所述,單目相機相比雙目相機來說差距很多,通過對單目進行運動測距后在一定情況下可以達到雙目相機的效果。單目相機也可以在最短的時間內定位物品、抓取物品。另外,單目比雙目相機的開發成本和難度比較低,如果精度要求不是那么嚴格的情況下單目相機可以采用。
參? 考? 文? 獻
[1]王捷,金明河,張國亮,胡海鷹,劉宏.視覺引導下機器人任意軌跡跟蹤試驗研究[J].機械與電子,2015(03):3-6.
[2]視覺SLAM中圖像特征點提取與匹配算法研究[J].陳慶偉,李民東,羅川,周軍,皇攀凌,李蕾.現代制造工程.2019(10)
[3]蘇劍波.ADRC理論和技術在機器人無標定視覺伺服中的應用和發展[J].控制與決策,2015,01:1-8.
[4]任福繼,孫曉.智能機器人的現狀及發展[J].科技導報,2015,21:32-38.
[5]盛華軍,等.視覺圖像技術與機器人工件抓取的協作應用[J].自動化與儀表,2020,35(2):37-46.