無人機的智能機巢設計
2021-06-08 14:32:13劉茂豐王偉陸昱丞
中國新通信 2021年3期
劉茂豐 王偉 陸昱丞
【摘要】? ? 為解決現無人機執行任務時,由于電池電量限制,而無法長久執行任務的弊端,本文設計一種可以自動更換電池的智能機巢。該系統以SIMATIC S7-200SMART作為系統核心處理單元,系統主要通過光電傳感器檢測無人機位置,PLC控制及時做出相應,控制機械手操作電池盒,進行更換電池操作。并且利用高精度定位系統RTK進行誘導降落。經過實驗測試表明,本系統具備自主更換電池功能和誘導降落功能。
【關鍵詞】? ? PLC? ? 光電傳感器? ? 機械手? ? RTK
引言
隨著無人機快速發展和廣泛應用,無人機技術很好地解決了人們對工作上的需求[1]。在工作上,人們利用無人機進行架空電路的巡檢,但因其電池影響,不能長久工作,需要人工更換電池,極大的降低了工作效率。傳統的固定機巢,只具備控制無人機起降功能,保護無人機避免損傷。傳統固定機巢以一塊四平八穩的平臺供無人機起降,該平臺具備升降功能,在不需使用的時候,可以將無人機收納在內部,可以有效保護無人機。
隨著科技不斷的發展以及市場需求的變化,傳統的固定機巢不能滿足人們對工作上的需求。傳統的固定機巢需要人為選址放置,一般情況不輕易改變機巢位置,并且必須選取空曠且平穩的地方安置,因為無人機降落的時候會有誤差,無法保證在降落的時候,不會碰撞周邊物件,其作業范圍有一定限制 [2]。而智能機巢指的是以合理的機械結構設計為基礎,基于PLC控制,兩者相輔相成,利用PLC控制機械手抓取電池或放入電池。利用STM32F405芯片搭建智信息交互的智能處理單元,高精度定位系統RTK和智能處理單元之間采用CAN通信[3-4],PLC控制和智能處理單元之間采用串口通信,高精度定位系統RTK獲取當前智能機巢的經緯度位置,通過智能處理單元發送經緯度位置給無人機,來誘導無人機降落。因此研究巡檢無人機的智能機巢具有重要意義。
一、系統總體方案設計
該系統框圖如圖1所示,該系統主要由智能處理單元(MCU)、RTK、PLC控制、機械手部分組成。其中MCU采用的是STM32F405芯片,主要負責數據的中轉;RTK板卡部分主要提供精確的經緯度信息;PLC控制部分主要功能是接受到指令后,操作機械手;機械手的功能是抓取電池。
二、系統硬件設計
2.1 智能處理單元
智能處理單元采用ST公司的STM32F405系列芯片,該芯片是ARM的Cortex-M4系列內核,最高工作頻率可達168 MHz,工作電壓在 2.0V-3.6V。該芯片具有192KB的SRAM、512KB的FLASH,該系列芯片擁有高性價比、低功耗等特點。在此基礎上搭載SIM7600CE-L的4G通信模塊,該模塊支持多種頻段,用于和無人機進行數據交互。
2.2 高精度定位系統RTK
如下圖2所示,RTK板卡采用諾瓦泰多頻單側板卡,支持多頻測向和定位解算,同時支持雙天線輸入。
2.3 PLC控制系統
PLC控制系統采用SIMATIC S7-200SMART作為主控。S7-200有5中CPU模塊,CPU226自帶24輸入和16輸出,同時具有良好的可擴展性,使用中小型控制系統中,用于本課題所設計的智能機巢,已經足夠。
2.4智能機巢設計
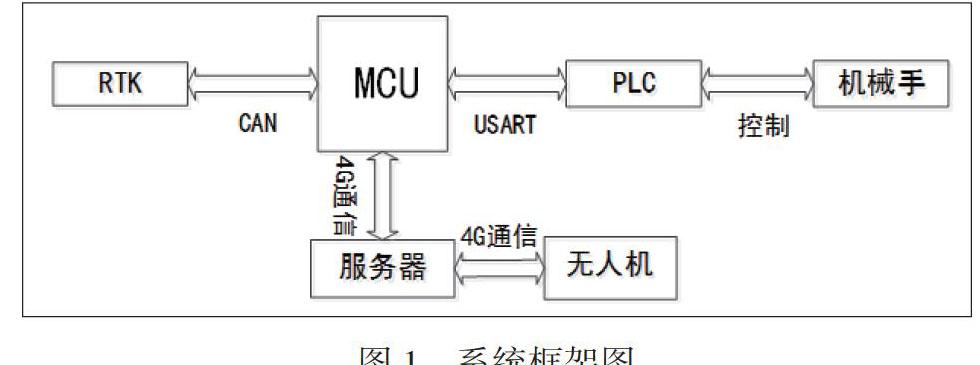
智能機巢由起降平臺、機械手和電池倉組成。起降平臺供無人機更換電池和起降。機械手為3軸自由度,分別X軸、Y軸和Z軸,每一個軸的機械手下方都安裝兩個光電傳感器,一個在起點位置,一個在終點位置,可以判定機械手的移動狀態。通過PLC控制電機轉動,從而帶動對應的機械手動作,最終可以完成更換電池操作[5]。如圖3所示。
2.5 機械臂設計
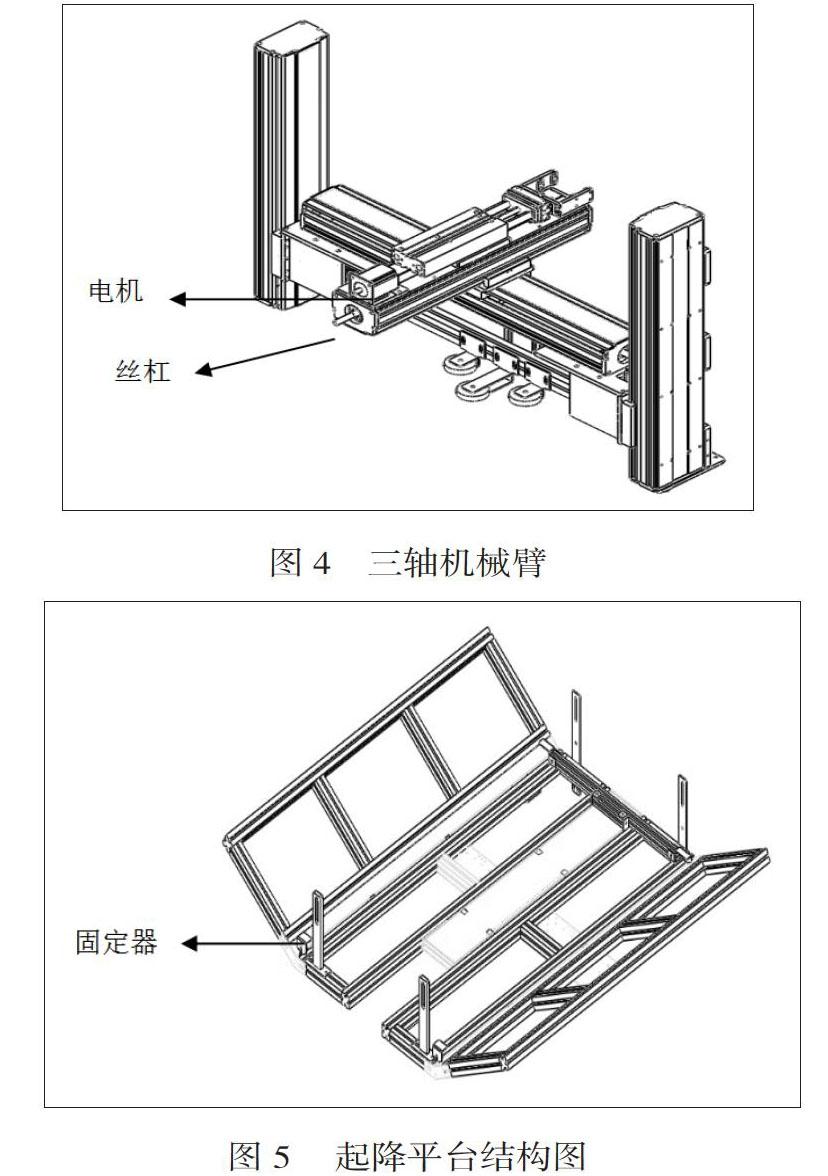
三軸機械臂均由絲杠帶動,從而向上、向下、向左、向右、向前和向后運動。絲杠由電機帶動,如圖4所示。
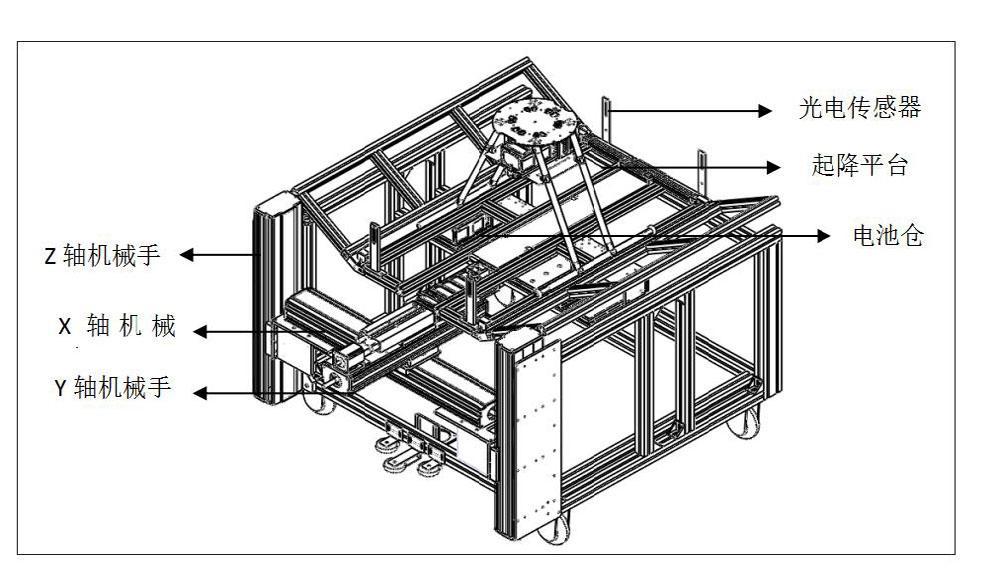
2.6 起降平臺設計
起降平臺有斜板和平板構成,斜板可以用作,無人機降落后,出現左右位置偏差,可以通過這種坡面,滑動至平板上,平板上有4處固定器,光電傳感器檢測到無人機降落后,固定器會自動向中間合攏,鎖緊無人機。固定器由氣缸帶動。如圖5所示。
三、系統功能實現
系統軟件部分主要流程包括以下步驟:
(1)系統初始化,該過程主要包括機械臂初始化,機械臂歸位于初始位置,等待指令下發。智能處理單元初始化,連接網絡,后臺控制中心可以獲取到當前機巢的信息。RTK獲取當前智能機巢經緯度位置。
(2)當無人機只想任務結束后,無人機通過4G通信模塊,將即將降落的信息發送至服務器,服務器將該條信息轉發至智能機巢,智能機巢獲取到信息后,發送RTK已經獲取到的機巢的經緯度至服務器,服務器將經緯度信息轉發至無人機,至此,形成一個閉環。無人機開始降落,在降落的過程實時接受智能機巢發送來的經緯度信息,隨時調整降落位置。
(3)無人機降落平穩后,智能機巢的起降平臺上安裝由固定器。無人機降落會影響光電傳感器獲取光源的數量,因此判斷無人機已經降落,PLC會控制起降平臺上的固定器將無人機腳架鎖緊。
(4)PLC控制會發送控制命令,首先會移動X軸機械手向中間移動,當X軸機械手移動至終點位置時,光電傳感器會檢測到光亮的變化,從而獲取到X軸機械手的位置狀態。Z軸和Y軸的移動過程大致相同,不在描述。Y軸機械手上安裝抓手,當三軸全部移動到指定位置后,PLC控制抓手抓取電池。抓手獲取無人機電池后,PLC在控制3軸機械手原路返回,最終將電池插入機巢的電池倉中。系統在更具電池倉中電池的電量,選擇符合要求的電池,利用抓手抓出后,在通過機械手送回無人機中。實現自主更換電池。
(5)當無人機重新獲取充足電能后,首先先將準備指令發送至服務器,服務器獲取后,轉發指令到智能機巢,機巢松開固定器。無人機可以起飛。
四、結束語
針對市場的需求,本系統PLC作為核心控制,設計智能機巢。利用4G通信模塊和高精度定位系統RTK,實時誘導無人機降落,可以將無人機的降落精度精確到厘米級。并且具備自主更換電池、成本低廉、操作簡單等優點。該智能機巢在無人機巡檢領域有較大的市場和應用價值。
參? 考? 文? 獻
[1]. 胡智敏,李凱,湯國鋒,等.一種輸電線路無人機“巢-巢”巡檢新模式[J].江西電力,2018
[2] 韋舒天,李龍,岳靈平,等.輸電通道人機協同巡檢方式的探索[J].浙江電力,2016.
[3] 柴大帥. 高頻單歷元GNSS動態差分定位技術研究[D].山東科技大學,2017
[4] 李成鋼.網絡GPS/VRS系統高精度差分改正信息生成與發布研究[D].西南交通大學,2007. [5] 張波,李衛民,尚銳.多功能上下料用機械手液壓系統 [J]. 液壓與氣動,2012(8):31-32.