登錄月背與月面釋放:驚心動(dòng)魄24小時(shí)
2021-06-08 21:28:46北京航天飛行控制中心
現(xiàn)代閱讀 2021年2期


環(huán)月降軌
從距離月球38萬千米之遙的地球到距離月背100千米的環(huán)月軌道,“嫦娥四號(hào)”離月背越來越近了。
根據(jù)既定方案,“嫦娥四號(hào)”要從距月面15千米處開始動(dòng)力下降。因此,飛控中心首先要對(duì)它進(jìn)行環(huán)月降軌控制,將“嫦娥四號(hào)”的飛行軌道從100千米×100千米的圓形軌道調(diào)整為100千米×15千米的橢圓軌道。
實(shí)施降軌控制前,飛控軌道專家們經(jīng)過反復(fù)測(cè)算發(fā)現(xiàn),按照當(dāng)前的飛行狀態(tài),“嫦娥四號(hào)”雖然可以準(zhǔn)確進(jìn)入動(dòng)力下降的起始點(diǎn),但是時(shí)間上會(huì)比預(yù)定計(jì)劃晚50秒。盡管這個(gè)時(shí)間滿足不超過1分鐘的誤差約定,完全在可控范圍內(nèi),但飛控軌道專家們綜合考量后續(xù)可能產(chǎn)生的控制誤差,決定再次調(diào)整環(huán)月降軌控制策略,進(jìn)一步提高控制精度,修正時(shí)間偏差。
2018年12月30日8時(shí)53分許,“嫦娥四號(hào)”發(fā)動(dòng)機(jī)點(diǎn)火,按照飛控中心新制訂的策略實(shí)施15千米環(huán)月降軌控制。5分鐘后,軌控標(biāo)定結(jié)果顯示,“嫦娥四號(hào)”成功進(jìn)入100千米×15
千米的環(huán)月橢圓軌道。根據(jù)最新的軌道參數(shù)推算,“嫦娥四號(hào)”進(jìn)入動(dòng)力下降起始點(diǎn)的時(shí)間偏差不會(huì)超過20秒,遠(yuǎn)遠(yuǎn)滿足任務(wù)精度要求。
倒計(jì)時(shí)6小時(shí)
2019年1月3日凌晨4時(shí)左右,距離“嫦娥四號(hào)”實(shí)施動(dòng)力下降還有6小時(shí)。
又一個(gè)新的情況出現(xiàn)了,根據(jù)最新地形文件及動(dòng)力下降打靶分析結(jié)果,發(fā)現(xiàn)預(yù)定著陸點(diǎn)附近的地形不利于探測(cè)器落月,需要將落點(diǎn)位置向南調(diào)整1.7千米。
根據(jù)“嫦娥四號(hào)”運(yùn)行軌道分析,只能通過調(diào)整動(dòng)力下降時(shí)刻來規(guī)避不利地形。軌道專家組立刻展開“動(dòng)力下降時(shí)刻對(duì)落點(diǎn)影響”的分析。調(diào)整參數(shù)、輸入模型、計(jì)算分析……在不到10分鐘的時(shí)間里,一個(gè)將動(dòng)力下降時(shí)刻推遲1秒鐘以實(shí)現(xiàn)落點(diǎn)向南調(diào)整1.7千米的嶄新方案出爐,并交由任務(wù)現(xiàn)場(chǎng)的飛控組專家們審議確定其可行性。
凌晨5點(diǎn),新的動(dòng)力下降注入數(shù)據(jù)迅速生成并通過復(fù)核,一切準(zhǔn)備就緒。
2019年1月3日上午10時(shí)15分,激動(dòng)人心的時(shí)刻終于到來了,動(dòng)力下降開始的指令從飛控大廳里發(fā)出,通過“鵲橋”中繼星,發(fā)送至遠(yuǎn)在38萬千米之外的環(huán)月軌道上的“嫦娥四號(hào)”,7500牛變推力發(fā)動(dòng)機(jī)準(zhǔn)確開機(jī),動(dòng)力下降開始。
此時(shí),“嫦娥四號(hào)”在距離月背表面15千米的近月點(diǎn)以大約1.7千米/秒的速度環(huán)月飛行,在7500牛發(fā)動(dòng)機(jī)反推作用下,相對(duì)月球的飛行速度正逐步下降。
約5分鐘后,“嫦娥四號(hào)”攜帶的降落相機(jī)開機(jī),圖像通過“鵲橋”中繼星傳回地面,此時(shí),它已經(jīng)可以清晰地看見月背這片神秘之地了。38萬千米外的飛控大廳里,大家都屏住呼吸,緊盯著眼前的巨型液晶屏,期待著能夠盡快親眼見證降落月背的壯觀景象。
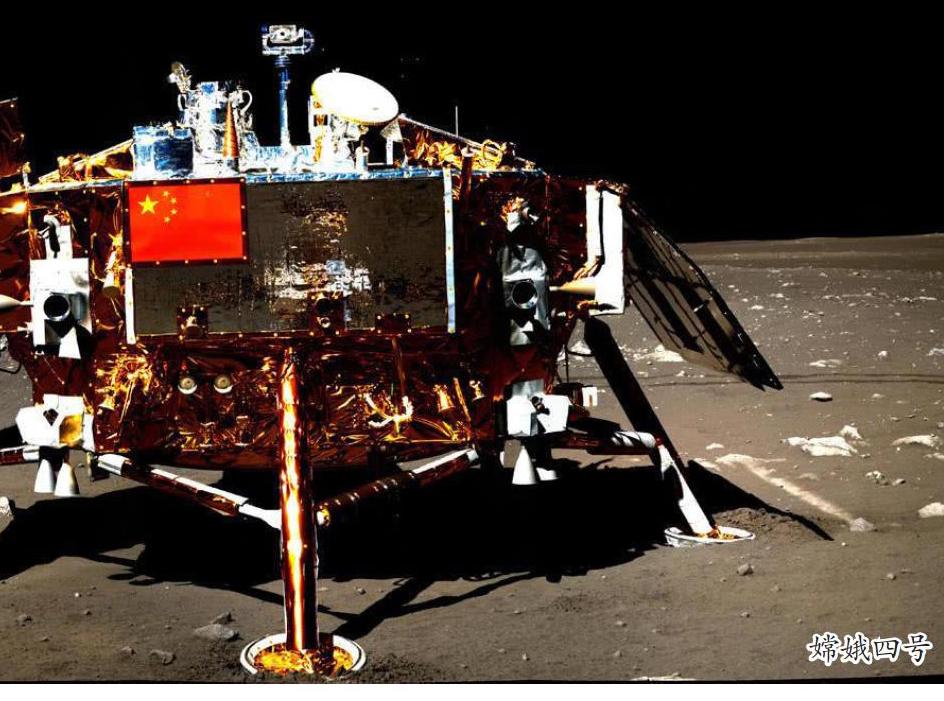
月面越來越近,2019年1月3日10時(shí)26分,“嫦娥四號(hào)”穩(wěn)穩(wěn)地落在月球背面南極—艾特肯盆地內(nèi)的馮·卡門撞擊坑內(nèi),中國成為世界上第一個(gè)成功實(shí)現(xiàn)月球背面軟著陸的國家!
經(jīng)過飛控中心的精確計(jì)算,中國首次獲得“嫦娥四號(hào)”的落月點(diǎn)的坐標(biāo)為東經(jīng)177.5991°、南緯45.4446°,這也是人類首次到達(dá)月背的精確位置坐標(biāo),在人類探月征程中具有重要的里程碑意義!
科普時(shí)間:“嫦娥四號(hào)”的著陸點(diǎn)坐標(biāo)是怎么計(jì)算出來的?
“嫦娥四號(hào)”要著陸月球背面,由于月球遮擋,傳統(tǒng)的測(cè)距、測(cè)速及甚長基線干涉測(cè)量技術(shù)在“嫦娥四號(hào)”動(dòng)力下降階段無法發(fā)揮作用,整個(gè)降落過程中無法獲得無線電的定位結(jié)果。因此,基于視覺的定位技術(shù)成為“嫦娥四號(hào)”著陸點(diǎn)快速、高精度定位的主要技術(shù)手段。“嫦娥四號(hào)”是該技術(shù)首次。
在執(zhí)行任務(wù)前,飛控中心利用“嫦娥二號(hào)”獲取的高分辨率數(shù)字正射影像圖(DOM圖),制作了覆蓋范圍約51千米×30千米的無縫高精度預(yù)選著陸區(qū)高清底圖,為“嫦娥四號(hào)”基于視覺的著陸點(diǎn)定位及著陸區(qū)的地形分析提供了重要的基礎(chǔ)數(shù)據(jù)。
接下來的工作就是運(yùn)用計(jì)算機(jī)視覺技術(shù)將著陸過程中的降落序列圖像與著陸區(qū)高清底圖進(jìn)行匹配,從而求解著陸點(diǎn)的位置信息。由于著陸過程實(shí)時(shí)下傳的降落圖像斑塊效應(yīng)嚴(yán)重,我們?cè)谄ヅ涠ㄎ惶幚砬耙霋佄锞€模型對(duì)圖像進(jìn)行了增強(qiáng)處理,有效提升了圖像質(zhì)量。
2019年1月3日10時(shí)23分03秒,“嫦娥四號(hào)”向飛控中心下傳了其降落相機(jī)拍攝的月球背面的第一張圖像,標(biāo)志著“嫦娥四號(hào)”正在一步步地接近月球背面,后續(xù)“嫦娥四號(hào)”陸續(xù)傳回多幅圖像,整個(gè)過程約10分鐘。
根據(jù)下傳地面的圖像信息可以判斷“嫦娥四號(hào)”實(shí)際降落區(qū)域就在我們的預(yù)選著陸區(qū)高清底圖內(nèi),具備定位條件。20分鐘后,根據(jù)高壓縮比的降落圖像,飛控中心計(jì)算得到了初始落月位置。在“嫦娥四號(hào)”著陸后的第二天,即北京時(shí)間2019年1月4日,“嫦娥四號(hào)”再次下傳了一部分低壓縮比的降落圖像。利用這些數(shù)據(jù),飛控中心進(jìn)一步精細(xì)化了著陸點(diǎn)的定位結(jié)果。
從“嫦娥四號(hào)”安全著陸月面那一刻開始,飛控中心的駕駛員立即進(jìn)入了緊張的工作狀態(tài)。現(xiàn)場(chǎng)的每個(gè)人都盯著屏幕上著陸器(“嫦娥四號(hào)”)和巡視器(“玉兔二號(hào)”)的位置姿態(tài)信息,偏航、滾動(dòng)和俯仰角度都很理想,按照任務(wù)確定的“兩器分離”10條準(zhǔn)則,姿態(tài)這一關(guān)算是過了,可以按計(jì)劃實(shí)施“玉兔二號(hào)”月球車月面釋放后續(xù)程序。
月面釋放,所有可能都想到了嗎?
“兩器分離”是決定“嫦娥四號(hào)”任務(wù)成敗的關(guān)鍵環(huán)節(jié)。分離前后工作還有哪些問題?所有的可能都想到了嗎?
在實(shí)施任務(wù)前,我們做了最壞的打算,如果一旦出現(xiàn)故障,不能實(shí)現(xiàn)“兩器分離”,“玉兔二號(hào)”無法駛到月面,我們?cè)凇版隙鹚奶?hào)”頂部也要完成拍照,并下傳至地面。
“嫦娥四號(hào)”登陸月背時(shí)是南向著陸,“玉兔二號(hào)”要從“嫦娥四號(hào)”的南側(cè)踏上月背。“兩器分離”前會(huì)使用“玉兔二號(hào)”的導(dǎo)航相機(jī)對(duì)周邊地形進(jìn)行感知。最初設(shè)計(jì)的飛行程序中,只對(duì)“嫦娥四號(hào)”南側(cè)(“玉兔二號(hào)”駛離“嫦娥四號(hào)”一側(cè))實(shí)施兩次成像,每次成像的俯仰角度不同,分別用于看近處和稍遠(yuǎn)處,而不進(jìn)行北側(cè)地形感知。專家給出的理由是“玉兔二號(hào)”導(dǎo)航相機(jī)對(duì)南部成像主要用于“玉兔二號(hào)”駛離“嫦娥四號(hào)”作策略選擇;導(dǎo)航相機(jī)如果360°環(huán)拍兩圈,成像和下傳耗時(shí)增加則會(huì)推遲“兩器分離”時(shí)間,此時(shí)正值月午,擔(dān)心“玉兔二號(hào)”散熱不及時(shí)而發(fā)生故障。
我們當(dāng)時(shí)分析必須進(jìn)行360°環(huán)拍,如果不對(duì)“嫦娥四號(hào)”北側(cè)及周邊地形進(jìn)行考察,將無法全面掌握“嫦娥四號(hào)”周邊地形,若“玉兔二號(hào)”駛離“嫦娥四號(hào)”后按照錯(cuò)誤方向環(huán)繞“嫦娥四號(hào)”,將嚴(yán)重影響月晝下午行駛到“嫦娥四號(hào)”北面完成“兩器互拍”的任務(wù)。經(jīng)與探測(cè)器系統(tǒng)專家分析研究,提出了調(diào)整導(dǎo)航相機(jī)俯仰角度進(jìn)行環(huán)拍一圈的策略,在不增加成像耗時(shí)的基礎(chǔ)上,確保對(duì)南北向及周邊環(huán)境的成像感知,一舉兩得。
按照制定的環(huán)拍策略完成“嫦娥四號(hào)”頂部環(huán)拍后,所有人都焦急地等待地形數(shù)據(jù)處理結(jié)果。2019年1月3日19時(shí)40分,地形產(chǎn)品終于制作完成。
從環(huán)拍成像結(jié)果上看,“嫦娥四號(hào)”南面東側(cè)只有一個(gè)已經(jīng)退化的撞擊坑T3,地形條件可能比西側(cè)更好,按照此前的后續(xù)移動(dòng)策略,可能會(huì)選擇東側(cè)路徑。但是從“嫦娥四號(hào)”北面看,東側(cè)后續(xù)將無路可走,無法到達(dá)原定“兩器互拍”點(diǎn)。當(dāng)看到這張圖的時(shí)候,所有人都驚出了一身冷汗。若是沒有進(jìn)行環(huán)拍,按原計(jì)劃從東側(cè)向北部繞行是極可能誤入歧途的。幸好我們作出了正確的決定。
突如其來的多徑效應(yīng)
異常總是不期而遇,飛控中心在進(jìn)行測(cè)控遮擋和駛離區(qū)域地形分析的工作時(shí),突然發(fā)現(xiàn)“玉兔二號(hào)”全向天線B機(jī)AGC(自動(dòng)增益控制)電平在太陽翼展開、桅桿展開、桅桿動(dòng)作以及移動(dòng)時(shí)都會(huì)產(chǎn)生波動(dòng),影響指令發(fā)送和遙測(cè)信息接收。由于整個(gè)過程都未發(fā)現(xiàn)天線遮擋,因此懷疑是由于“嫦娥四號(hào)”桅桿和定向天線反射的中繼星電磁波造成了多徑效應(yīng),由相位相反的反射信號(hào)抵消了部分直射信號(hào)的功率,造成接收信號(hào)減弱。
大家的神經(jīng)一下子就緊張起來,如果“玉兔二號(hào)”不能正常接收地面遙控指令,就可能永遠(yuǎn)停在“嫦娥四號(hào)”的陰影里,如果出現(xiàn)這種情況,后果將是災(zāi)難性的。
定位分析完成后,最終決策將桅桿收攏以完成后續(xù)分離過程。2019年1月3日22時(shí)26分,地面發(fā)令實(shí)施桅桿收攏,后續(xù)AGC電平雖仍有變化,但未再接近門限值,整個(gè)分離過程中繼鏈路鎖定正常,指令接收正常。“玉兔二號(hào)”終于“低著頭”安全駛下“嫦娥四號(hào)”,大家都松了一口氣。
向左還是向右
成功釋放“玉兔二號(hào)”后,它向哪里走非常關(guān)鍵,既要盡快駛離“嫦娥四號(hào)”陰影區(qū),又不能出現(xiàn)行走安全問題。“玉兔二號(hào)”有3個(gè)選擇:直行、左轉(zhuǎn)、右轉(zhuǎn)。實(shí)際任務(wù)中,須對(duì)測(cè)控遮擋、陰影情況和月面地形進(jìn)行綜合判斷,并最終確定駛離策略。
第一階段決策:根據(jù)中繼星的位置信息,“玉兔二號(hào)”隨“嫦娥四號(hào)”的轉(zhuǎn)移機(jī)構(gòu)下降到月面上時(shí),可能存在“嫦娥四號(hào)”對(duì)“玉兔二號(hào)”的測(cè)控遮擋。進(jìn)一步分析表明,“嫦娥四號(hào)”南向的地形信息顯示路徑左轉(zhuǎn)向和右轉(zhuǎn)向均存在障礙,直行路徑上無障礙。
因此,最后決策采用自主直行不避障的方式駛離。事實(shí)上為了確保萬無一失,我們?yōu)榉乐钩霈F(xiàn)控制系統(tǒng)故障,“玉兔二號(hào)”要一直開向前方的大坑,但為避免進(jìn)入大坑,需要在“玉兔二號(hào)”安全駛離“嫦娥四號(hào)”后,地面立即發(fā)送遙控指令刪除直行指令。
第二階段決策:2019年1月3日21時(shí)58分左右,轉(zhuǎn)移機(jī)構(gòu)下降到月面,開始第二階段決策過程,考慮“嫦娥四號(hào)”不遮擋“玉兔二號(hào)”中繼鏈路,建議采用地面控制“玉兔二號(hào)”移動(dòng)3000毫米的方式駛離轉(zhuǎn)移機(jī)構(gòu)。22時(shí)11分,最終駛離方式確認(rèn),地面刪除了之前上注的自主直行走出陰影區(qū)的指令,采用地面控制方式駛離。
從上面的控制過程可以看出,控制方案雖然在任務(wù)前已制定完成,但在著陸月面后,須根據(jù)實(shí)際情況分階段地不斷進(jìn)行調(diào)整,這也是月面遙操作的復(fù)雜之處。
A點(diǎn)成像
“玉兔二號(hào)”移動(dòng)至月面到達(dá)X點(diǎn)后,馬上開始了X點(diǎn)定位計(jì)算和X點(diǎn)向A點(diǎn)(“玉兔二號(hào)”在“嫦娥四號(hào)”南側(cè)預(yù)定成像點(diǎn))感知規(guī)劃。在這一節(jié)點(diǎn)上,必須確保X點(diǎn)對(duì)A點(diǎn)完成感知且數(shù)據(jù)下傳完成,并在下一次進(jìn)站之前完成X點(diǎn)向A點(diǎn)移動(dòng)規(guī)劃。
開始實(shí)施X點(diǎn)對(duì)A點(diǎn)感知時(shí)距離出站設(shè)置還有2小時(shí),X點(diǎn)對(duì)A點(diǎn)成像結(jié)果下傳時(shí)距離出站設(shè)置還有30分鐘。大家都盯著屏幕上一幅幅傳來的圖像。30分鐘完成傳圖,時(shí)間上應(yīng)該是夠的,但是已經(jīng)基本沒有余量,如果傳圖期間發(fā)生任何一個(gè)意外,對(duì)整個(gè)工作計(jì)劃就會(huì)產(chǎn)生較大的影響。
時(shí)間一秒一秒地流逝,最后一幅圖像下傳完成之后,也到了該進(jìn)行出站設(shè)置的時(shí)間,所有人的心都踏實(shí)了。突然,圖像分析人員報(bào)告圖像描述文件中成像機(jī)構(gòu)角度信息查詢數(shù)據(jù)庫返回錯(cuò)誤,無法自動(dòng)生成圖像描述文件。這又是一個(gè)始料未及的突發(fā)狀況,若是圖像描述文件無法建立,后面就沒有辦法生成地形圖,會(huì)直接影響后續(xù)的路徑規(guī)劃工作。
經(jīng)過分析,得知是備份節(jié)點(diǎn)上數(shù)據(jù)庫存在異常,此時(shí)如果等待數(shù)據(jù)庫恢復(fù)再自動(dòng)生成描述文件顯然已經(jīng)來不及。大家在虛驚一場(chǎng)后,迅速開始一行一行地手動(dòng)編輯生成圖像描述文件,最終順利完成了圖像描述文件的編輯和校對(duì)工作,確保了進(jìn)站前路徑規(guī)劃工作的完成。
由于時(shí)間緊迫,沒來得及把“嫦娥四號(hào)”的桅桿直立,“玉兔二號(hào)”的這張“歪脖”照多少留下了一些遺憾,而這是“嫦娥四號(hào)”最后一次機(jī)會(huì)拍攝“玉兔二號(hào)”順光正面照。
科普時(shí)間:月球車為什么要“午休”?
當(dāng)太陽在月球上升到最高點(diǎn)前后,月午來臨時(shí),月球表面氣溫達(dá)到最高,“玉兔二號(hào)”表面的溫度將超過100℃。此外,再加上真空和強(qiáng)輻射等極端環(huán)境,如果月球車在此時(shí)運(yùn)行,可能會(huì)導(dǎo)致設(shè)備故障和車體受損。
“玉兔二號(hào)”在月午前會(huì)轉(zhuǎn)動(dòng)車頭向西,并進(jìn)入最小工作模式,只保留綜合電子分系統(tǒng)、電源分系統(tǒng)、測(cè)控分系統(tǒng)工作的基本要求,關(guān)閉其他所有設(shè)備,進(jìn)入月午“避暑”。之后,地面若是發(fā)現(xiàn)車體溫度仍然很高,會(huì)豎起太陽翼進(jìn)行“遮陽”降溫。
(摘自北京科學(xué)技術(shù)出版社《月背征途:中國探月國家隊(duì)記錄人類首次登陸月球背面全過程》??? 作者:北京航天飛行控制中心)
(圖注:嫦娥四號(hào);飛控大廳內(nèi)緊張工作的飛控團(tuán)隊(duì);“玉兔二號(hào)”頂部環(huán)拍地形圖;“嫦娥四號(hào)”動(dòng)力下降過程拍攝的圖像;“玉兔二號(hào)”駛離“嫦娥四號(hào)”。這是人類探測(cè)器在月球背面留下 的第一履足跡)