托卡馬克實驗裝置的實驗大廳移動輻射監測機器人設計
2021-06-14 10:53:10吳欣揚陳玉慶謝遠來胡純棟
同位素 2021年3期
吳 斌,楊 振,吳欣揚,陳玉慶,李 軍,謝遠來,胡純棟
(1.中國科學院等離子體物理研究所,安徽 合肥 230031; 2.安徽省合肥市第九中學,安徽 合肥 230001)
聚變能是最具希望解決人類未來能源需求的終極能源,托卡馬克磁約束聚變裝置則最有可能實現聚變能商業應用。在托卡馬克裝置運行期間,高溫聚變等離子體會產生大量的聚變中子、 γ射線以及高能硬 X 射線輻射,確保周邊環境和人員的電離輻射安全是聚變能開發研究中的重要環節。全超導非圓截面托卡馬克裝置(experimental advanced superconducting tokamak, EAST )是我國獨立設計、建造,并于2005年成功投入實驗運行[1-3]。主要開展氘等離子體放電實驗,每年運行4~6個月。采用脈沖放電運行模式,每個脈沖持續時間約10 s(長脈沖運行模式已超過400 s),每天約進行100次脈沖放電實驗。除托卡馬克裝置本身歐姆場加熱外,已建成的輔助加熱系統還包括低雜波(lower hybrid wave, LHW,源功率10 MW)、離子回旋(ion cyclotron resonance heating, ICRH, 源功率12 MW)、電子回旋共振(electron cyclotron resonance heating, ECRH,源功率1 MW)和中性束注入(neutral beam injector, NBI,源功率8 MW)加熱系統,已實現等離子體電子溫度超過一億度,密度大于5.0×1019m-3,以及100 s以上的高約束模放電。
EAST 裝置放電運行時會有多種射線產生。在高功率 NBI 注入加熱情況下, D-D聚變中子產額已超過1.0×1014s-1。在低密度、逃逸以及放電破裂時,高能逃逸電子會與裝置器壁發生厚靶韌致輻射,產生能量高達10 MeV以上的硬X射線。高能硬X射線與裝置結構材料發生光核反應,也會產生大量的光致中子。除了高溫等離子體內部核反應過程產生的γ射線外,中子在輸運過程中與外圍結構材料發生非彈性散射或俘獲反應也會產生大量的γ射線。為防止實驗過程中產生的各種射線對周邊環境和實驗人員造成影響,EAST主機大廳四周采用1.5 m厚的混凝土屏蔽墻,頂部混凝土屏蔽層也達到1 m。人員以及設備通道大門均采用1.5 m 厚的屏蔽水門[4]。可注入含硼水,進一步吸收慢化后的熱中子。在 EAST 裝置大廳及周邊實驗場所的敏感區域,安裝了13 組中子、γ劑量率在線實時監測儀,對等離子體放電期間以及實驗間隙期的輻射劑量率進行連續測量[5]。為確保實驗場所和職業人員的輻射劑量安全,還布設了累積式劑量計,對中子、γ總輻射劑量進行被動累積測量[6]。基于六輪移動救援機器人底盤,研制EAST實驗大廳移動輻射監測機器人,搭載X、γ輻射在線監測儀,機器人可利用同步定位與建圖技術(SLAM)構建環境地圖自主移動或通過高清圖像遠程控制,將輻射劑量超閾聲光和實時劑量率發送給控制大廳內的上位機。此外,移動輻射監測機器人可以對EAST裝置大廳內進行連續巡視監測,及時監測發現巡測路徑上的劑量率異常,向周圍附近的工作人員發出警示報警,確保周邊工作人員的輻射劑量安全。
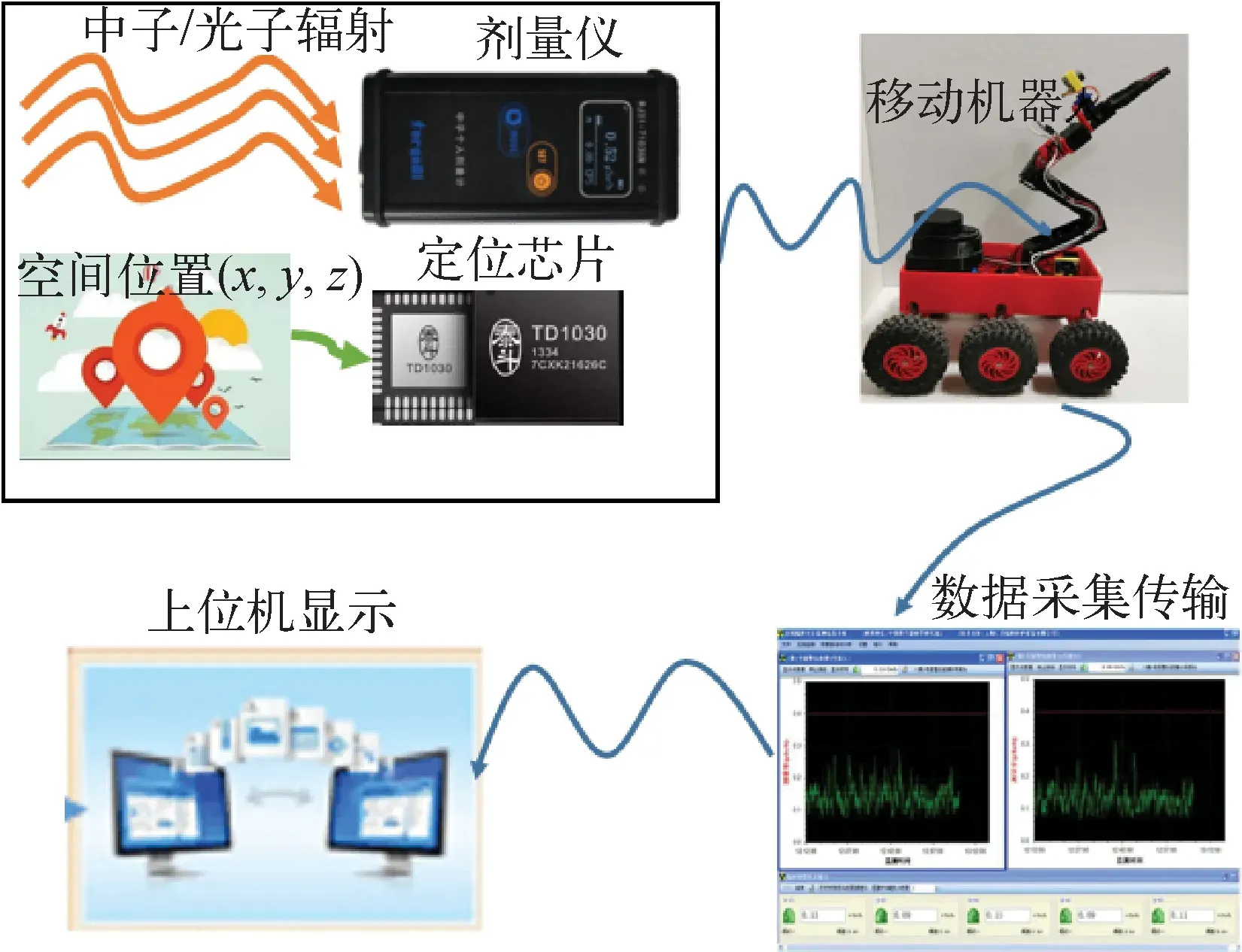
圖1 移動式輻射監測設計原理Fig.1 Principle of mobile radiation monitoring
1 設計原理
移動式輻射監測設計原理示于圖1。為實時了解不同場所的輻射劑量率,以此判斷維修方案與現場滯留時間,利用移動機器人攜帶中子光子現場輻射劑量儀,同時搭載采集周圍環境圖像信息的高清圖像采集系統,將采集的位置信息與輻射劑量率值通過網絡或RS485通訊協議與上位機進行通訊,便于控制人員及時了解大廳內不同位置、不同時刻的輻射劑量率。
2 結構與功能設計
2.1 機器人結構設計
移動輻射監測機器人整體結構示于圖2。機器人由車體、機械臂、車載電子設備組成。車體包括車架、懸架、車輪、車廂等部件組成。車體采用六輪驅動,并采用了大扭矩的電機驅動。

圖2 移動輻射監測機器人整體結構Fig.2 Overall structure of mobile radiation monitoring robot
移動輻射監測機器人在復雜的地形下有較強通過能力。移動機器人通常采用履帶式或輪式底盤,履帶式底盤與地面接觸面積大,在不平地面上性能較好,穩定性強,越障性能優越,但速度不如輪式快,且能量損耗大,綜合考慮輪式底盤在一定程度上可以滿足全超導非圓截面托卡馬克裝置(EAST)大廳地面境對機器人的要求。機器人的車輪設計減震彈性懸掛系統,安裝橡膠海綿充氣輪胎,在減震彈簧作用下,車輪盡可能與地面接觸,提供有效的驅動力。采用六輪驅動,相對于四輪驅動的機器人,六輪驅動的機器人由于驅動輪數目多,即使有少數車輪懸空,仍會有足夠數目的車輪可以提供抓地力,可以有效提高在復雜地形下的通過能力[6-8]。
車架采用箱式車架,分3段安裝6個獨立懸架。懸架采用獨立懸架,每一側的車輪可以單獨通過彈性阻尼懸架與車架連接,兩側車輪可以單獨跳動,互不影響,保證車輪在復雜地形下有效接觸地面,提供可靠的抓地力,以提高機器人在現場的通過能力。懸架由懸臂和彈性阻尼減震器組成,懸架通過軸承和防松螺母與車架連接,保障懸架系統可靠工作。減震器帶有彈簧和液壓阻尼,并可以調節減震器的彈性,以適應不同的路況要求。車輪由輪胎、輪輞以及聯軸器組成。輪胎選用86 mm橡膠海綿輪胎。直徑較大的輪胎可提高在復雜地形下的通過能力。機械臂具有5個自由度,采用雙軸數字舵機LX-16A,使用串口總線減少了機械臂上的線纜數目,末端執行器采用二指夾爪,機械臂末端安裝攝像頭,用于近距離觀察外界環境。
在機器人的原型設計階段,大量采用3D打印制造機器人的零部件,大幅度降低了機器人的建造成本,加快了機器人的設計與制造速度,3D打印采用聚乳酸(PLA)熱塑性材料,具有良好的拉伸強度和高剛度比,3D打印可一次打印出形狀和結構非常復雜的零件,可大幅度降低機械零件的數目和重量,省去大量的螺絲螺母等固定件。通過優化結構設計,在同樣動力配置的情況下,增加機器人的動作執行速度,提高機器人的機動性。
采用3D建模軟件OpenSCAD開展機器人的機械結構設計,將機器人的主要參數如車體的尺寸、軸距、壁厚等定義為變量,設計過程可以方便地修改這些參數,加快設計優化進度。
2.2 車載電子設備
移動輻射監測機器人系統硬件結構圖示于圖3。

圖3 移動輻射監測機器人系統硬件結構圖Fig.3 Hardware structure diagram of mobile radiation monitoring robot system
1) 機器人動力。包括6個370減速電機,電機采用高轉速大功率的直流電機,工作電壓12 V,額定電流350 mA,轉速17 000 r/min,輸出軸轉速500 r/min,額定力矩5 kg·cm。直流減速電機價格便宜,動力強,更適合機器人在復雜路況下的運動。電機驅動采用4塊TB6612電機驅動模塊,可以驅動6個370電機和2個減速電機,用于驅動機器人的底盤電機和機械手上的電機運動。開發了Arduino擴展板用于連接Arduino Mega 2560和TB6612電機驅動模塊、減速電機、數字舵機等器件。
2) 機械臂舵機。采用Lobot智能串口雙軸數字舵機LX-16A,由于使用的串行總線舵機采用半雙工串行總線,而Arduino下位機只提供全雙工串行總線,因此采用和串行總線舵機配套的控制板。通過該控制板,舵機的通信方式轉變為全雙工模式,以適應Arduino下位機的要求。
3) Arduino。作為機器人系統的下位機,采用Arduino Mega 2560 進行機器人的運動控制。Arduino通過串行接口接收樹莓派上位機的指令,使用數字I/O接口控制電機旋轉方向、脈沖寬度調制(pulse width modulation ,PWM)控制電機功率,從而控制機器人的運動。通過串行接口對機械臂上的舵機發出指令、獲取舵機狀態,定時向上位機報告,有效地控制機械臂的操作。
4) 樹莓派。采用樹莓派3B作為機器人的上位機,主要負責網絡通信和圖像傳輸、處理。樹莓派3B使用串行接口與Arduino下位機通信,通過支持802.11 n、5.8 GHz的WiFi模塊與計算機采用服務器-客戶機模式進行通信,傳輸攝像頭圖像,接收控制信息。同時樹莓派3B提供了4個USB2.0接口,用于連接攝像頭,監控機器人周圍的環境。
2.3 數據控制軟件系統構建
機器人是一種自動化程度很高的機器,具有感知、動作、規劃和協同等智能。控制系統是機器人的核心部分之一,控制系統方案的設計直接關系機器人性能要求,是機器人智能的主要表現。
控制系統方案的設計取決于控制對象和控制目標。本文中控制對象為機器人,使機器人按照操作人員的控制命令在復雜的環境中運動,實時傳回周圍環境信息和自身的狀態信息。機器人采用主從式控制系統,操縱端為主控制計算機,車載端為從控制計算機。其中,主控制計算機完成坐標變換、地圖創建、人機交互等功能,從控制計算機主要負責采集傳感器信息、控制命令收發、底層控制命令解析生成等。主從控制計算機通過無線網絡通信和交互。移動輻射監測機器人主要由運動控制子系統、在線輻射監測子系統、自主導航子系統、視頻監控子系統、生命探測子系統、聲光報警子系統、電源子系統和通信子系統組成。
移動輻射監測機器人系統的軟件架構圖示于圖4。機器人下位機主要用于接收輻射信號和位置信號來源,包括劑量儀器的示數、SLAM 位置圖像傳輸數據、控制機器人的運動軌跡等。機器人上位機主要是工作人員發布指令和接收下位機傳輸的數據,并進行機器人軌跡和劑量判斷,用于現場警報。控制臺主要開發數據的可視化顯示,并實現探頭、上位機和下位機通訊連接等功能。
2.4 移動輻射監測系統
由于EAST中性束注入的束能量一般為30~70 keV。注入時EAST大廳的劑量率可達到10 mSv/h,停機后大廳的劑量率為本底水平。而NBI打靶測試時,其光子的最大能量與束能量相當。故機器人輻射監測系統采用HA1100Med塑料閃爍體X、γ輻射在線監測儀,其能量范圍30 keV~3 MeV,響應時間<2 s,可以滿足EAST實驗大廳光子實時劑量率測量需求。機器人攜帶的中子探頭一般采用He-3計數管加聚乙烯樹脂慢化球類型。探頭獲取的輻射劑量率通過RS485接口與上位機通訊,實現輻射劑量率數據傳輸。圖5為輻射監測用到的光子探頭,也可搭配中子探頭。

圖5 輻射監測探頭Fig.5 Radiation monitoring probe
機器人輻射監測劑量率系統與環境自主建圖系統配合,完成輻射劑量率超標位置在環境地圖中的標定。環境自主建圖系統采用基于激光雷達的機器人操作系統(robot operating system, ROS)架構,實現高精度的SLAM。機器人配有Rplidar A1改進版激光雷達,半徑掃描范圍12 m,可實現SLAM導航應用輻射測量激光雷達SLAM建圖(圖6)。ROS 為適用于機器人的開源操作系統,它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞,以及包管理。也提供用于獲取、編譯、編寫、跨計算機運行代碼所需的工具和庫函數。

圖6 輻射測量激光雷達SLAM建圖Fig.6 Construction of LIDAR SLAM for radiation measurement
環境自主建圖系統的軟件結構圖示于圖7。機器人還搭載高清圖像傳輸系統用于機器人的遠程操控,紅外圖像和CO2傳感器等生命探測設備用于實驗大廳現場工作人員位置確定,確保人員安全。紅外熱像儀采用MLX90640紅外熱像儀傳感器模塊來檢測物體。該模塊紅外接近傳感器具有32×24溫度格傳感器。采用OpenCV處理輸入到網絡攝像頭mjpg-streamer的視頻流,可以用于識別二維碼位置標志等視頻處理。
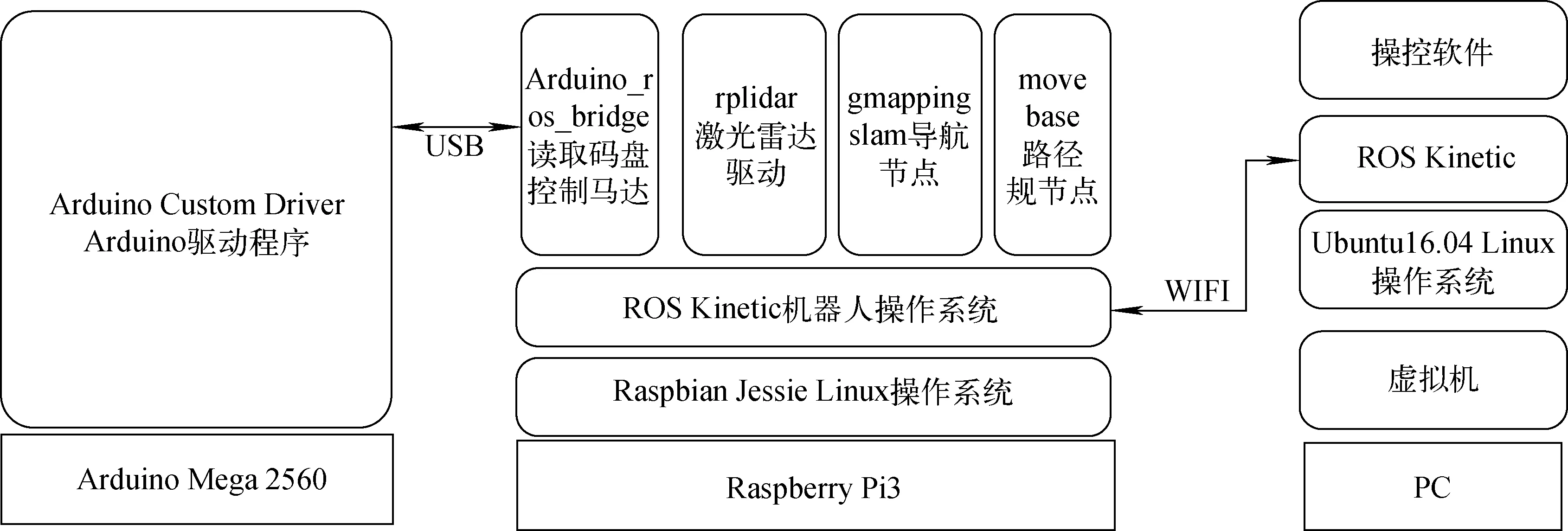
圖7 環境自主建圖系統的軟件結構圖Fig.7 Software structure diagram of the environment autonomous mapping system
3 性能測試
為了測試輻射監測機器人的性能,在非輻射條件下對機器人的控制性能進行測試,分別對移動平臺的力學性能、通信性能、續航能力、機械臂控制能力、SLAM建圖能力、相機圖像采集能力等方面進行測試。測試結果為機器人最大速度為1 m/s,爬坡能力30°,機械臂具有5個自由度,最大伸展臂長45 cm、最大伸展高度45 cm、機械臂底座可以360°旋轉,肩關節彎曲角度為150°和肘關節彎曲角度為180°,腕關節可以正負120°滾轉、正負90°俯仰。無遮擋的情況下圖像距離>300 m,能夠控制機械臂運動,相機可以實時獲取圖像,車體最大負重1 kg,電池續航時間>2 h。
對機器人在各種復雜地形如草地、沙地、拆除建筑工地和大鵝卵石灘地環境中進行測試,驗證了機器人具有通過這些復雜地形的強大能力。機器人表現良好,因為采用了六輪彈性懸掛系統。機器人可以有效地與地面接觸,即使在大角度傾斜狀態也能及時脫困。在RoboCup機器人世界杯救援機器人項目比賽的9個測試地形進行測試,機器人可以順利地通過這些地形障礙,并且正常完成巡檢數據采集。圖8顯示了機器人在復雜地形環境與RoboCup比賽場地測試情況,這些測試地形的復雜程度都遠超過EAST大廳,圖9為輻射監測機器人在EAST大廳內的巡檢路線。輻射監測機器人在EAST-NBI測試環境進行了初步測試,輻射監測機器人遠程操控工作正常,在實驗大廳內可正常巡檢。

圖8 復雜地形環境與RoboCup比賽場地測試Fig.8 Complex Terrain Environment and RoboCup Field Testing

圖9 輻射監測機器人在EAST大廳內的巡檢路線Fig.9 The inspection route of the radiation monitoring robot in the EAST hall
4 總結
本文基于六輪移動救援機器人底盤,研制了EAST實驗大廳移動輻射監測機器人,搭載X、γ輻射在線監測儀,機器人可利用SLAM構建環境地圖自主移動或通過高清圖像遠程控制,系統還搭載紅外圖像和CO2傳感器等生命探測設備,輻射劑量超閾聲光報警裝置,用于發現警示現場工作人員,確保人員安全。
