智能汽車非穩(wěn)態(tài)縱向跟車行為滾動(dòng)時(shí)域控制
2021-06-16 04:19:08朱向雷王英資
中國測(cè)試 2021年5期
朱向雷,王英資,侯 玨,2
(1.中國汽車技術(shù)研究中心有限公司,天津 300300; 2.同濟(jì)大學(xué)汽車學(xué)院,上海 201804)
0 引 言
汽車縱向跟車系統(tǒng)能夠?qū)崟r(shí)有效地控制自車車速和自車與前車的安全車距,是汽車實(shí)現(xiàn)智能輔助駕駛的首要系統(tǒng)之一,可以有效降低道路交通事故,其重要性不言而喻[1]。跟車系統(tǒng)涉及到的控制方法可以歸納為最優(yōu)控制[2-3]、滑模變結(jié)構(gòu)控制[4-6]、模糊神經(jīng)網(wǎng)絡(luò)控制[7-8]、滾動(dòng)時(shí)域控制[9-10]、多模式切換控制[11-12]等。滾動(dòng)時(shí)域控制又稱模型預(yù)測(cè)控制,能有效解決多優(yōu)化目標(biāo)及約束問題,并能彌補(bǔ)模型失配、時(shí)變、干擾等引起的不確定性,成為近年來智能駕駛領(lǐng)域研究和應(yīng)用的熱點(diǎn)[13-14]。
汽車跟車過程包括穩(wěn)態(tài)跟車和非穩(wěn)態(tài)跟車,所謂非穩(wěn)態(tài)跟車是指自車建立與前車安全車距的過程,因前車急加速或緊急制動(dòng)等特殊工況的不可預(yù)知性以及前車突然進(jìn)入雷達(dá)探測(cè)范圍的突兀性等,使得非穩(wěn)態(tài)跟車控制面臨較大挑戰(zhàn)。為提升智能汽車非穩(wěn)態(tài)縱向跟車性能并避免與前車發(fā)生碰撞,研究一種針對(duì)非穩(wěn)態(tài)跟車行為的滾動(dòng)時(shí)域控制方法,建立考慮動(dòng)態(tài)延遲的自車運(yùn)動(dòng)學(xué)模型,以誤差向量為狀態(tài)變量設(shè)計(jì)自車與前車縱向運(yùn)動(dòng)學(xué)關(guān)系模型,分析智能汽車非穩(wěn)態(tài)跟車過程,基于跟車誤差向量構(gòu)建非穩(wěn)態(tài)跟車行為最優(yōu)控制問題,并將其推導(dǎo)為二次規(guī)劃問題,然后通過一系列有限時(shí)域內(nèi)帶約束的滾動(dòng)優(yōu)化問題得到非穩(wěn)態(tài)跟車行為狀態(tài)反饋控制律,最后仿真驗(yàn)證可行性。
1 縱向跟車系統(tǒng)建模
圖1所示為包含自車和前車的縱向跟車系統(tǒng)示意圖,其中前車的位移、速度和加速度分別表示為xp、vp和ap,自車的位移、速度和加速度分別表示為xf、vf和af,自車與前車的實(shí)際車距為d,指定的期望車距為dsivd,車距誤差e=d-dsivd。

圖1 縱向跟車系統(tǒng)示意圖
考慮自車的動(dòng)態(tài)延遲,建立自車運(yùn)動(dòng)學(xué)模型

式中:af(t)——自車實(shí)際加速度;
af,des(t)——自車期望的控制加速度;
τ——表征車輛動(dòng)態(tài)遲滯的時(shí)間常數(shù),取τ=0.5 s。
同時(shí),自車速度不能取負(fù)值,且加速度需滿足非對(duì)稱約束極限,即自車需滿足約束條件

選取自車位移、速度和加速度為狀態(tài)變量,將自車運(yùn)動(dòng)學(xué)模型用連續(xù)狀態(tài)空間表示,即
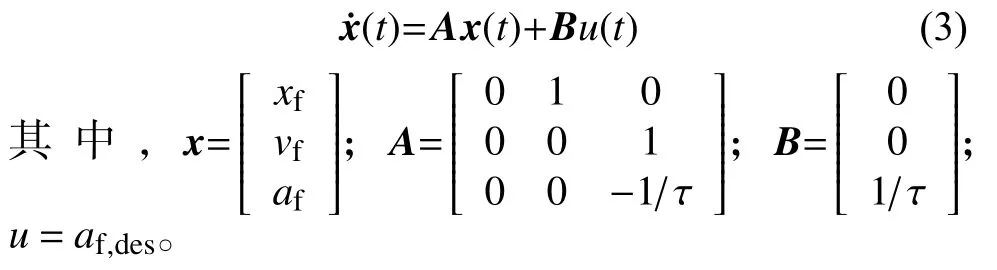
將式(3)寫成以T為采樣周期的離散形式

以車距誤差、車速誤差和自車加速度組成的誤差向量為狀態(tài)變量,描述自車與前車的關(guān)系,即


2 非穩(wěn)態(tài)縱向跟車行為描述
2.1 跟車過程描述
自車確定與前車安全車距的過程稱為非穩(wěn)態(tài)跟車,這一過程需要兩步:首先自車需要決策出從速度控制切換至距離控制的時(shí)刻,其次自車需要高效的控制算法將自車操縱至與前車保持指定的期望車距。自車與前車保持指定安全車距的過程稱之為穩(wěn)態(tài)跟車。
圖2所示為相對(duì)車速與車距關(guān)系圖,車距為負(fù)值意味著自車與前車發(fā)生碰撞,車速為負(fù)值則說明自車比前車速度快。圖中包括車速控制、車距控制和駕駛員控制3種模式,自車通過比較相對(duì)車速和車距來選擇控制模式,并決定模式切換時(shí)刻。非穩(wěn)態(tài)跟車即為沿著車速控制和車距控制之間的分界線確定指定車距,即圖中D點(diǎn)。
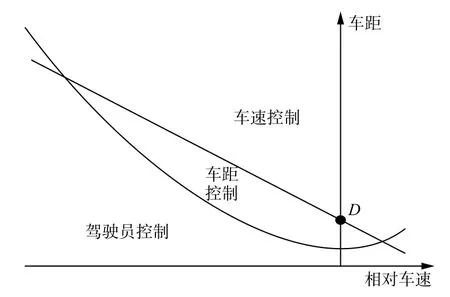
圖2 相對(duì)車速與車距關(guān)系圖
2.2 非穩(wěn)態(tài)跟車初始條件
非穩(wěn)態(tài)跟車的初始條件是指自車初遇前車并從速度控制模式進(jìn)入非穩(wěn)態(tài)跟車模式時(shí)的車距、相對(duì)車速、自車速度和自車加速度等參數(shù)值。若自車以最大的制動(dòng)減速度從設(shè)定車速減速至前車車速而避免與前車發(fā)生碰撞,這是可行的。此時(shí)的最小制動(dòng)車距由最大制動(dòng)減速度決定。假定前車定速行駛,自車遇到前車時(shí)為車速保持模式。
連續(xù)狀態(tài)空間式(3)的解表示為


由此可得

由于前車和自車初速度初始速度相同,最大減速度的初始條件僅決定于


圖3所示為非穩(wěn)態(tài)工況初始條件,給出了不同初始相對(duì)車速時(shí)實(shí)施最大制動(dòng)減速度所需要的最小車距。若不滿足此初始條件,一旦進(jìn)入非穩(wěn)態(tài)跟車則引起碰撞事故。
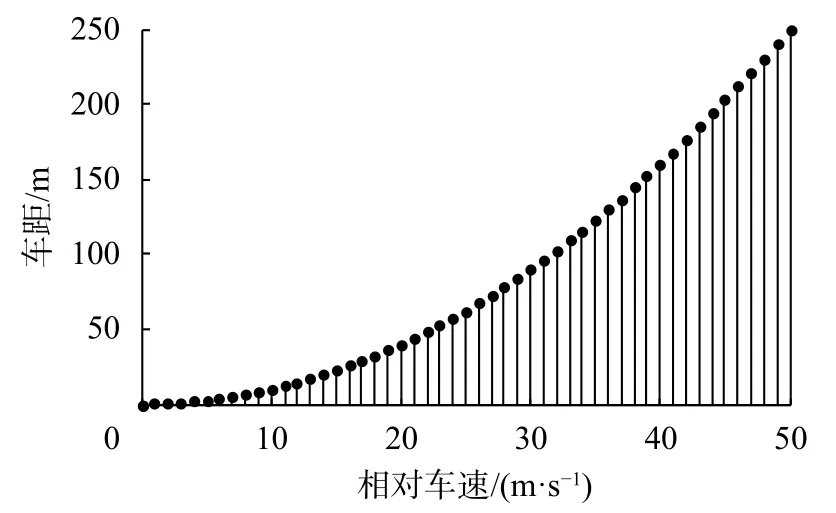
圖3 非穩(wěn)態(tài)工況初始條件
3 非穩(wěn)態(tài)縱向跟車滾動(dòng)時(shí)域控制
3.1 優(yōu)化問題確立
基于跟車誤差向量,縱向跟車問題可看作滿足一定約束條件的最優(yōu)控制問題,目標(biāo)函數(shù)如下

1)跟車系統(tǒng)約束式(5)重寫如下

2)狀態(tài)量和控制量約束
3)終端約束

3.2 優(yōu)化問題轉(zhuǎn)化
上述優(yōu)化問題無法直接求解,需將其進(jìn)行轉(zhuǎn)化。根據(jù)式(5),將誤差向量寫成誤差向量初值 e(0)和控制序列的形式

進(jìn)一步寫成矩陣形式
首先,性能指標(biāo)(15)式寫成矩陣形式為

把式(21)代入式(22),得到

其次,狀態(tài)約束式(17)寫為矩陣形式

將式(21)代入式(24),得到

再次,控制量約束式(18)寫為矩陣形式


最后,將式(20)代入終端約束式(19),得到

進(jìn)一步將終端約束表示為等式約束形式,即

綜上,得到二次規(guī)劃問題的目標(biāo)函數(shù)和約束條件

3.3 非穩(wěn)態(tài)跟車控制律滾動(dòng)時(shí)域求解
在每一采樣時(shí)刻t,系統(tǒng)實(shí)時(shí)采集車距、相對(duì)車速、自車速度和加速度,更新指定的期望車距并計(jì)算誤差向量e(t)。將e(t)作為初始條件,實(shí)現(xiàn)非穩(wěn)態(tài)跟車滾動(dòng)優(yōu)化求解,即


其中,Nt為非穩(wěn)態(tài)跟車所需要的時(shí)間。
滾動(dòng)時(shí)域方法通過一系列有限時(shí)域內(nèi)帶約束的最優(yōu)控制問題得到非穩(wěn)態(tài)跟車狀態(tài)反饋控制律。
4 結(jié)果驗(yàn)證
在Matlab/Simulink環(huán)境實(shí)現(xiàn)控制算法的仿真驗(yàn)證。為體現(xiàn)車輛非穩(wěn)態(tài)跟車行為,設(shè)定前車存在先減速、后加速、最后勻速行駛等非穩(wěn)態(tài)工況。將跟車控制結(jié)果與線性二次調(diào)節(jié)型(LQR)控制方法進(jìn)行對(duì)比,為便于結(jié)果分析,LQR控制方法的結(jié)果用A1表示,本文提出控制方法的結(jié)果用A2表示。
圖4為仿真結(jié)果,其中前車初速度為20 m/s,在6 s左右時(shí)減速至12 m/s,然后在12 s左右時(shí)又加速到20 m/s,之后一直保持勻速行駛。由圖4(a)知,因自車初速度小于前車初速度,故自車先加速,之后因前車減速,自車車速出現(xiàn)一定超調(diào)波動(dòng),最終隨前車的勻速行駛而進(jìn)入穩(wěn)態(tài)跟車階段,與A1算法相比,A2算法對(duì)應(yīng)的波動(dòng)峰值較小,收斂速度較快。由圖4(b)知,A1算法和A2算法最終都能控制車距趨于期望車距,但A2算法控制下的車距誤差較小。
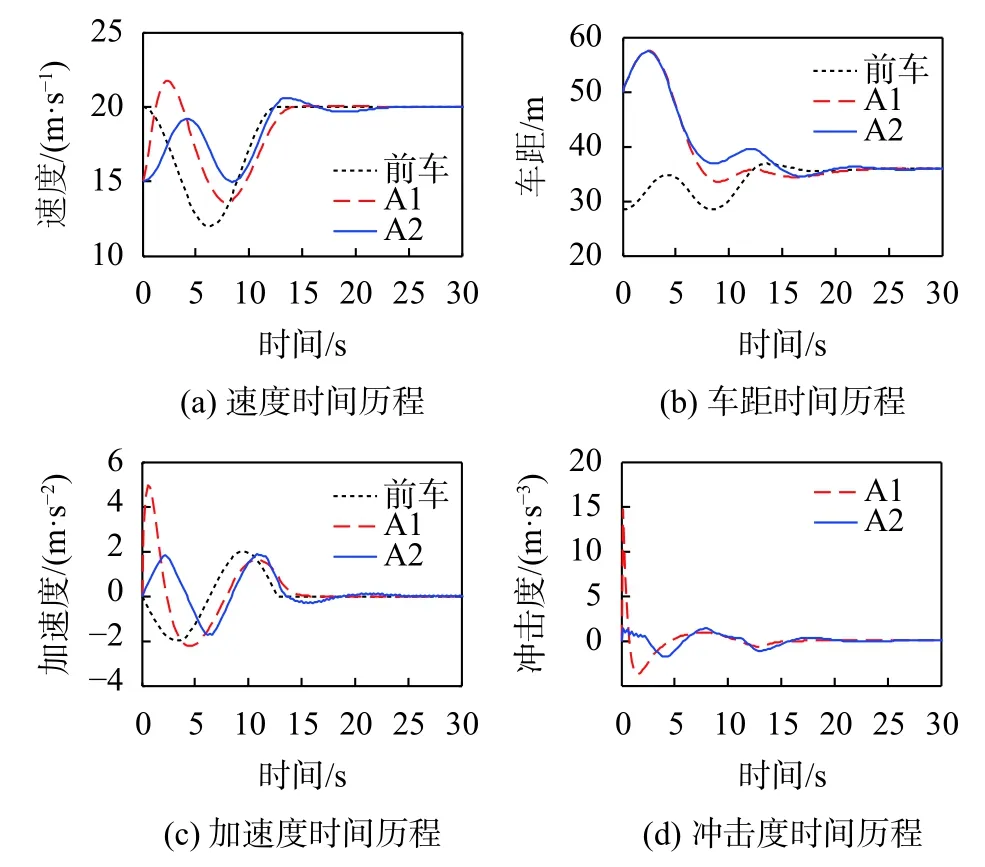
圖4 仿真結(jié)果
由圖4(c)知,在1 s時(shí)A1算法對(duì)應(yīng)的加速度峰值達(dá)到5 m/s2,這源于A1算法無法對(duì)控制目標(biāo)進(jìn)行限制,而過大的加速度會(huì)給駕駛員帶來強(qiáng)烈的不舒適感,違背非穩(wěn)態(tài)跟車目的,本文所設(shè)計(jì)滾動(dòng)時(shí)域控制算法A2可以實(shí)現(xiàn)較為平穩(wěn)的跟車,加速度最大值沒有超過2 m/s2,保證了車輛跟車的舒適性要求。由圖4(d)知,A2算法能控制自車沖擊度保持在較小范圍內(nèi),而A1控制器下自車車沖擊度在0.5 s左右甚至達(dá)到了15 m/s3,這嚴(yán)重影響非穩(wěn)態(tài)跟車過程的舒適性。故與A1算法相比,A2算法控制下的加速度和沖擊度峰值較小,收斂速度較快。
5 結(jié)束語
1)建立了考慮動(dòng)態(tài)延遲的自車運(yùn)動(dòng)學(xué)模型,并以誤差向量為狀態(tài)變量建立自車與前車縱向運(yùn)動(dòng)學(xué)關(guān)系模型。
2)分析智能汽車非穩(wěn)態(tài)跟車過程,并以解析形式給出非穩(wěn)態(tài)跟車的可行性初始條件。
3)基于跟車誤差向量構(gòu)建非穩(wěn)態(tài)跟車行為最優(yōu)控制問題,并將其推導(dǎo)為二次規(guī)劃問題,通過一系列有限時(shí)域內(nèi)帶約束的滾動(dòng)優(yōu)化問題得到非穩(wěn)態(tài)跟車行為狀態(tài)反饋控制律。
4)結(jié)果表明,所設(shè)計(jì)的非穩(wěn)態(tài)跟車控制方法能夠有效控制自車速度和加速度,快速收斂至指定車距實(shí)現(xiàn)穩(wěn)態(tài)跟車。