基于模糊控制理論的溫室茶樹灌溉控制策略研究
2021-06-18 00:35:30馬德新
陜西農業科學 2021年5期
關鍵詞:規則
韓 沙,馬德新
(青島農業大學 動漫與傳媒學院,山東 青島 266109)
引言
茶樹在生長期間,灌溉體系的制定具有十分關鍵的作用,在最近幾年中物聯網等方面的技術呈直線式發展,將其應用于灌溉技術中,可以使最后所呈現出來的效果更佳。茶樹在生長期間,需要通過科學的手段對其進行灌溉,以此來促進其茁壯成長,在該過程中茶樹需要吸收大量水分,因此相關人員應該對此提高重視,借助物聯網技術的優勢,并將其應用于農業領域中,從而確保灌溉工作能夠順利實施。水分是茶樹發育生長至關重要的因素之一,土壤含水量直接影響茶樹根系和葉片,水分的不足和過多,都會影響茶樹的生育[1]。如果出現水分不足的現象,則會導致茶樹生長緩慢,并對發芽率產生較大的消極影響。把模糊控制技術應用于農業領域中,能夠在一定程度上提高相關資源的合理分配率,這樣不但可以提升生產率,同時還可以降低資源耗費,從而實現精準灌溉以及做出邏輯決策及決策預測,使農業生產更加智能化。
1 模糊控制理論原理
模糊控制是在規則的基礎上所制定的,在設置期間可以省去構建模型這一環節,所以其原理十分易于理解。模糊控制體系在魯棒性方面具有一定的優勢,能夠在較大程度上弱化干擾,特別是應用于非線性等系統中時,所呈現出來的效果同預期相符。模糊控制裝置是在相關理論的基礎上制定的,通過模仿人類的思想,對以往的操作經驗進行總結,在此基礎上形成多種類型的控制規則,同時使用計算機來予以實現。模糊控制是在非線性的基礎上所制定的數學模型,所獲得的數據具有較高的可信度,并且魯棒性效果較好,在時變和滯后體系中所呈現出來的效果同預期相符[2]。
2 溫室茶樹水肥一體化灌溉模糊控制器設計
2.1 技術路線
通過查閱相關資料,并到實地進行考查,針對有關于茶樹灌溉的相關影響因素進行歸納整理,在此基礎上發現土壤濕度、降雨量、空氣濕度等因素所起到的作用較為顯著。因為植物在成長過程中需要大量的水資源,因此土壤含水量的大小具有十分關鍵的作用,這也就意味著我們能夠通過該指標的具體數值對植物需水情況進行推測。
溫度、濕度、光照情況以及土壤含水量等指標都會對茶樹成長產生較為顯著的影響,其中后者的作用最為顯著。在現實灌溉期間,一般情況下需要按照土壤含水率的實際情況來判斷植物是否缺水。此次研究中,令土壤最優含水量與實際含水量之間的差別為E,誤差變化率為Ec,在此基礎上展開研究,并設置流程圖,詳細情況可以參考圖1。

圖1 模糊控制流程
茶樹在各個生長階段中所需要的水分也會存在差異,出于對這方面的考慮,在此次研究工作中,首先掌握了茶樹的成長時間段,之后設需水量為U,再結合E以及Ec這兩個指標進行模糊化處理,在此基礎上制定灌溉方案。模糊控制結構圖如圖2所示。

圖2 模糊控制結構
2.2 模糊化處理
2.2.1 模糊量確定 在針對偏差E進行模糊處理的過程中,首先挑選出NB、NM、NS、ZO、PS、PM、PB這幾個模糊量,其中NB屬于負大,表示土壤處于極度缺水狀態,NM為負中,表示中度缺水狀態,NS為負小,表示微量缺水狀態;ZO為零,表示實測值與最佳值的差值為零;PS為正小,表示實測值略大于最佳值,水分處于微量超出狀態,PM為正中,表示實測值大于最佳值,水分處于中度超出狀態,PB為正大,表示實測值嚴重大于最佳值,水分處于嚴重超出狀態。模糊控制規則如表1所示。
偏差E的論域是[-6,6],誤差變化率Ec的論域是[-6,6],通過對當前僅有的文獻進行查閱,我們能夠了解到可以左右灌溉時間的因素涵蓋土壤濕度、氣候等因素,需水量U的論域選擇是[-6,6]。將E轉化成離散論域,則有量化因子QE,對于論域中的元素來說,則有相對應的離散論域元素Ei:
Ei=QE*((X)-0)=-X
(1)
由上式可得,E的離散論域為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],在此基礎上我們通過推理能夠得出,Ec以及U所對應的離散論域元素分別為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]、[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]。與該模糊控制裝置相關的輸入以及輸出變量都具有線性性質,并且這兩方面各自所對應的最大隸屬度函數均僅有一個[3],詳細情況可以參考下圖3、圖4、圖5:

圖3 E所對應的隸屬度函數

圖4 Ec所對應的隸屬度函數

圖5 U所對應的隸屬度函數
按照偏差E的實際變化情況可以劃分成7個級別,在此基礎上可以得到對應的模糊控制量,詳細情況可以參考表1。

表1 輸入變量E的模糊控制
在此基礎上,通過推理我們能夠得到變化率Ec所對應的模糊控制量,詳細情況可以參考表2。

表2 輸入變量Ec的模糊控制
2.2.2 模糊規則的設計 通過查閱相關文獻,設置出下列規則:
(1)若E負大,Ec負大,則U為負大;
(2)若E正大,Ec正大,則U為正大;
(3)若E負小,Ec負小,則U為0。
上述規則用IF A THEN B形式來描述和解釋:
(1)IF E=NB and Ec=NB THEN U=NB,偏差E負大(NB),Ec負大(NB),則充分表明反饋值所對應的超調量相對較大,并且該現象較為顯著,所以需要盡量壓低控制量,簡單來講就是令增量U呈現出負大狀態(NB)。
(2)IF E=PB and EC=PB THEN U=PB。偏差E正大(PB),則充分表明被控量波動較大,并且EC為正大(PB),代表該現象較為顯著,所以需要在短時間內提升控制量,簡單來講就是令增量U呈現出正大狀態(PB)。
(3)IF E=NS and EC=PS THEN U=ZO。偏差E為負小(NS),EC為正小(PS),則充分表明反饋值超過設定值的范圍并不大,同時二者之間的差距正在逐漸減小,所以在短時間內可以令控制量保持穩定,簡單來講就是令增量U值等于0。
在上述內容的基礎上,所得到的詳細數據可以參考表3。

表3 模糊規則控制
2.2.3 反模糊化 模糊控制器裝置的輸出量呈現為一個集合的形式,可以借助反模糊化途徑找到可行度較高的量[4],該方法有很多種形式,通過對此次研究的實際情況進行綜合考慮,最終決定使用重心法。所得到的二維輸入輸出關系模糊控制圖可以參考圖6。
3 仿真及實驗驗證
3.1 茶樹水肥一體化灌溉二維模糊控制系統仿真


圖7 茶樹模糊控制系統二維simulink仿真模型
3.2 實驗驗證
此次研究最開始是在2019年9月在青島農業大學開展,研究區域的具體地址為東經121°33′,北緯36°20′,其高為55.20 m。由于地理環境的影響,該地區氣候相對較為特殊,并且溫差較為顯著,降水量豐富,氣候偏向于濕潤,高達70%。此次所培養的茶樹品種為嶗山綠茶,一共有2 000株,為了確保其能夠具有較高的成活率,還修建了大棚。通過檢測我們能夠發現,該地區土壤偏向于酸性,其中涵蓋大量有機物,且營養豐富,同時還具有配套的澆灌系統。此外,為了能夠對大棚中的各項指標進行實時管理,還在其中安裝了體積較小的氣象站,只需要通過電腦等便可以實現監督,方便用戶讀出。在此次研究中,主要選擇茶樹在成長階段的信息展開研究,具體時間為2019年9月1-20日每日9:00-17:00。并且為了降低操作人員的工作壓力,設置該系統每隔1 min便自動對相關指標進行收集并保存。
為了驗證茶樹模糊控制器的有效性,將溫室大棚分為A、B兩個試驗區,兩區各1 000株茶樹。該實驗為單因素控制實驗,可變因素只有是否應用模糊控制器進行灌溉,在A區不進行灌溉,只需要用傳感器監控土壤含水率,B區借助該系統對茶樹的需水情況進行檢測,在發現水量不足的情況下自動進行灌溉。通過研究我們能夠發現,茶樹在陽光充足的時候需水量較大,此時土壤含水程度相對偏低,2019年9月12日陽光甚好,9:00-17:00A、B試驗田各時間段的數據如表4和表5所示。

表4 2019年9月12日(晴)9:00-17:00A區各時間段的數據

表5 2019年9月12日(晴)9:00-17:00B區各時間段的數據
從這些數據可以得出,兩區日土壤含水率日變化數據都有從高到低再到高的趨勢,是由于在光照變化的過程中,土壤含水率也呈現出較大的差異。但A區中變化趨勢明顯,B區變化較小,模糊控制智能灌溉系統及時調整了茶樹所需水的多少,使該試驗田的土壤含水率維持了相對穩定的狀態A、B兩區在2019年9月1-20日的土壤含水情況可以參考表6。
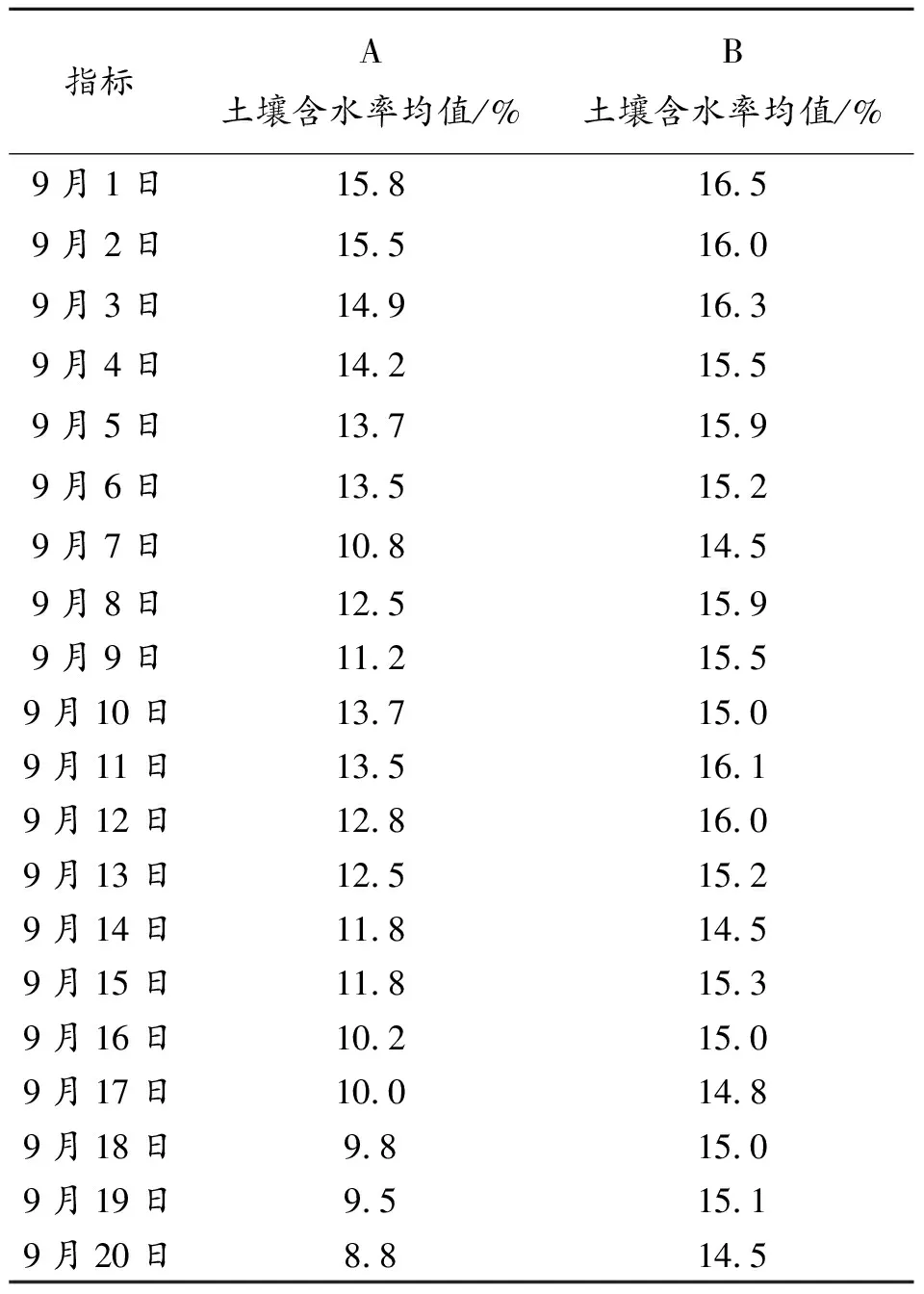
表6 2019年9月1-20日9:00-17:00A、B兩區土壤含水率均值數據
從表6可以得出,模糊控制系統的使用使茶樹的土壤含水率保持穩定,維持了茶樹生長所需最佳土壤含水率15%左右,模糊控制裝置所呈現出來的調節作用同預期相符。
4 結語和展望
模糊控制裝置是在大量前人研究的基礎上所研制的,其主要通過模擬人類的思維,對以往的操作經驗進行總結,在此基礎上形成多種類型的控制規則,同時使用計算機來予以實現[5]。此外,規則庫數據的精準度直接決定了最后的效果,如果規則數量偏少,則控制效果不理想,但是數量過多,則會增加計算量。筆者所設計的茶樹灌溉模糊控制器在小規模試驗田中的運行狀態良好,其穩定性和調節準確性在下一步的工作中還有待于提高和優化。
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42