異步電動(dòng)機(jī)故障仿真與診斷研究
2021-06-22 01:44:48趙乾麟方炳平游張平
微特電機(jī) 2021年6期
趙乾麟,趙 屹,方炳平,游張平,2
(1.浙江乾麟縫制設(shè)備有限公司,麗水 323000;2.麗水學(xué)院 機(jī)械工程系,麗水 323000)
0 引 言
異步電動(dòng)機(jī)因構(gòu)造簡(jiǎn)單、控制便利等優(yōu)點(diǎn),成為了一種廣泛應(yīng)用在各種生產(chǎn)活動(dòng)和生活中的工業(yè)設(shè)備[1-3]。然而,受工作電壓波動(dòng)、工作環(huán)境不穩(wěn)定、負(fù)載頻繁變動(dòng)等因素的影響,電機(jī)常出現(xiàn)各種故障。因此,開(kāi)展異步電動(dòng)機(jī)故障診斷技術(shù)研究,盡量防止故障發(fā)生,對(duì)于降低維修成本、消除事故威脅、減少經(jīng)濟(jì)損失等具有重要的理論意義與工程價(jià)值[4-6]。
傳統(tǒng)基于故障特征提取的診斷方法,需要領(lǐng)域工程師應(yīng)用大量領(lǐng)域知識(shí)選取好的特征,加之設(shè)備運(yùn)行過(guò)程中存在諸多不可預(yù)測(cè)因素,使得故障診斷的過(guò)程變得十分復(fù)雜,因此人工干預(yù)進(jìn)行特征提取的故障診斷方法存在一定的局限性[7-8]。近年來(lái),隨著人工智能領(lǐng)域的不斷發(fā)展,機(jī)器學(xué)習(xí)作為一種能夠從數(shù)據(jù)集中自主挖掘數(shù)據(jù)內(nèi)在特征的學(xué)習(xí)方式,受到越來(lái)越多專(zhuān)家學(xué)者的關(guān)注[9]。Liu 等人[10]提出了一種基于多尺度核函數(shù)的殘差卷積神經(jīng)網(wǎng)絡(luò)用于電機(jī)故障診斷。茍旭丹等人[11]提出了一種基于定子電流Hilbert 模量的混沌粒子群神經(jīng)網(wǎng)絡(luò)用于感應(yīng)電機(jī)轉(zhuǎn)子斷條故障診斷方法。張芳芳等人[12]提出了一種基于位移檢測(cè)的最小二乘支持向量機(jī)用于泵油電機(jī)的故障診斷。
本文基于Simulink平臺(tái)建立異步電動(dòng)機(jī)傳統(tǒng)故障仿真模型,并應(yīng)用人工神經(jīng)網(wǎng)絡(luò)開(kāi)展故障診斷研究。首先,在Simulink平臺(tái)上選取仿真模塊,設(shè)置單相短路(A相、B相、C相)、兩相短路(AB、AC、BC)6種接地短路故障類(lèi)型,設(shè)定仿真參數(shù),并進(jìn)行仿真分析;其次,建立異步電動(dòng)機(jī)上述故障的BP神經(jīng)網(wǎng)絡(luò)診斷模型;最后提取異步電動(dòng)機(jī)故障特征量,經(jīng)預(yù)處理后,送入BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行訓(xùn)練與診斷測(cè)試,仿真結(jié)果表明本方法是有效可行的。
1 異步電動(dòng)機(jī)Simulink建模
在Simulink中,根據(jù)異步電動(dòng)機(jī)系統(tǒng)物理對(duì)象選擇合適的仿真模塊,如表1所示。

表1 異步電動(dòng)機(jī)系統(tǒng)Simulink模塊的選擇
將以上模塊布置在合適位置并由輸入至輸出進(jìn)行連線,搭建完的異步電動(dòng)機(jī)Simulink模型如圖1所示。
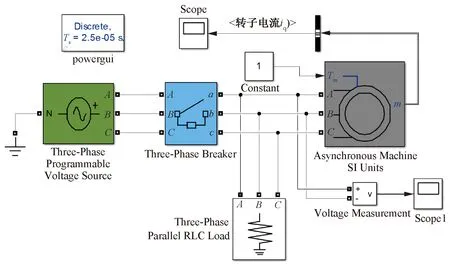
圖1 異步電動(dòng)機(jī)Simulink模型
2 故障仿真
2.1 仿真參數(shù)設(shè)置
根據(jù)研究對(duì)象實(shí)際,分別對(duì)以上所選模塊進(jìn)行參數(shù)設(shè)置。如在“Asynchronous Machine SI Units”模塊中對(duì)異步電動(dòng)機(jī)模塊參數(shù)進(jìn)行設(shè)置,如圖2所示。又如在“Three-Phase Programmable Voltage Source”模塊中設(shè)置異步電動(dòng)機(jī)電壓源Voltage Source模塊的線電壓有效值、相位、頻率分別為220 V、0、50 Hz。直到將圖1所有已選的模塊參數(shù)設(shè)置完畢。
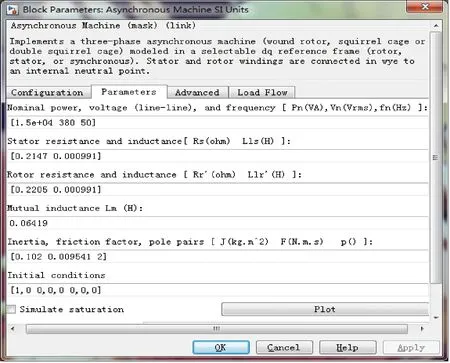
圖2 三相異步電動(dòng)機(jī)模塊參數(shù)設(shè)置
2.2 故障設(shè)置
將圖1仿真模型中的A相接地,便可設(shè)置出A相(接地)短路的故障。同理,將圖1仿真模型中的B相接地,便可設(shè)置出B相(接地)短路的故障。依此類(lèi)推,可以設(shè)置出C相(接地)短路、AB兩相(接地)短路、AC兩相(接地)短路、BC兩相(接地)短路等余下來(lái)的4種故障。
2.3 故障仿真與數(shù)據(jù)采集
將故障仿真起始時(shí)間參數(shù)設(shè)為0,仿真終止時(shí)間參數(shù)設(shè)為1,仿真步長(zhǎng)切換成變步長(zhǎng),設(shè)定“ode23tb”求解器作為本仿真模型的計(jì)算方法,設(shè)置完畢后啟動(dòng)仿真運(yùn)行,分別采集保存5種頻率(0、20 Hz、50 Hz、80 Hz、100 Hz)工況下的幅值與基波幅值的比值數(shù)據(jù),為后續(xù)診斷識(shí)別提供數(shù)據(jù)基礎(chǔ)。
3 故障診斷
3.1 輸入數(shù)據(jù)歸一化預(yù)處理
將幅值與基波幅值的比值作為輸入特征量,為了使診斷運(yùn)算快速收斂,對(duì)上述5種頻率工況下的幅值與基波幅值的比值數(shù)據(jù),歸一變換到[0.1,0.9]之間的小數(shù)。
3.2 輸出模式設(shè)定
根據(jù)上述設(shè)定的6種故障模式(A相短路、B相短路、C相短路、AB兩相短路、AC兩相短路以及BC兩相短路),加上正常工況模式,共可得到7種輸出模式,并可由3個(gè)輸出分量來(lái)表述,如表2所示。

表2 輸出模式
3.3 BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練與故障診斷
上述采集5種頻率工況的數(shù)據(jù),因此設(shè)定BP網(wǎng)絡(luò)輸入單元為5;7種輸出模式由3個(gè)輸出分量表述,因此設(shè)定BP網(wǎng)絡(luò)輸出單元為3,通過(guò)試算確定隱含層單元為9。為驗(yàn)證BP神經(jīng)網(wǎng)絡(luò)的有效性,隨機(jī)選取5種頻率工況數(shù)據(jù)各20組共100組數(shù)據(jù)作為訓(xùn)練樣本,對(duì)BP網(wǎng)絡(luò)進(jìn)行訓(xùn)練。將新的50組數(shù)據(jù)(每種頻率工況10組)作為測(cè)試樣本,運(yùn)用訓(xùn)練好的BP網(wǎng)絡(luò)對(duì)其進(jìn)行診斷,診斷結(jié)果令人滿(mǎn)意,如表3所示,7種狀態(tài)正判率都不低于90%,說(shuō)明了BP網(wǎng)絡(luò)對(duì)故障狀態(tài)表現(xiàn)出較強(qiáng)的泛化識(shí)別能力,總正判率達(dá)到了97.1%,說(shuō)明采用BP網(wǎng)絡(luò)對(duì)異步電動(dòng)機(jī)進(jìn)行故障診斷是可行有效的。

表3 故障診斷結(jié)果比較
4 結(jié) 語(yǔ)
BP神經(jīng)網(wǎng)絡(luò)對(duì)異步電動(dòng)機(jī)7種狀態(tài)(A相短路、B相短路、C相短路、AB兩相短路、AC兩相短路、BC兩相短路以及正常)具有較強(qiáng)的泛化識(shí)別能力。
Simulink模擬故障,結(jié)合BP神經(jīng)網(wǎng)絡(luò)識(shí)別故障,診斷精度高,可以較好地對(duì)異步電動(dòng)機(jī)的各種故障模式進(jìn)行分類(lèi),其故障診斷是有效的,為異步電動(dòng)機(jī)其他類(lèi)型故障的診斷識(shí)別問(wèn)題提供了新的參考與方案。
猜你喜歡
少先隊(duì)活動(dòng)(2021年4期)2021-07-23 01:46:22
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
沈陽(yáng)醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
