基于多新息限定記憶的永磁同步電機參數辨識
2021-06-24 02:22:02張玉峰吳紫輝陳甜甜
科學技術與工程 2021年13期
關鍵詞:模型
張玉峰,郭 山,吳紫輝,陳甜甜,劉 娜
(西安科技大學電氣與控制工程學院,西安 710054)
永磁同步電機(permanent magnet synchronous motor,PMSM)由于其具有結構簡單、成本低、效率高、調速范圍寬、動態響應快等優點,被廣泛應用于航空、工業控制、新能源電動車等高性能伺服系統。實現高精度位置或轉速控制的電機伺服控制技術性能依賴于精確的電機電磁參數[1-3],基于參數辨識的PMSM系統狀態監測及故障診斷能提高電機運行的安全可靠性[4-5],因此,參數辨識在電機工程應用中具有重要意義。中外學者對電機參數離線辨識和在線辨識方面進行了大量研究。離線辨識法不能獲得電機實時參數,而在線參數辨識方法能夠實時跟蹤由運行工況及環境的影響的電機參數,從而更新控制器參數實現自適應控制,提高電機控制的動態性能[6-8]。
基于遞推最小二乘參數算法的電機參數辨識,無需電機外部激勵,簡單易實現。文獻[9]模擬實際環境改變電機電阻和磁鏈,辨識誤差約為2%,證明遞推最小二乘法能夠在參數改變的情況下得到準確辨識結果。但因為舊數據一直存在于辨識過程的總體采集數據中,造成新數據價值不高,計算結果實時性不高。文獻[10]采用最小二乘法進行參數辨識,其仿真結果在3ms內收斂至1%,由于采樣誤差等原因,試驗研究中電阻參數辨識誤差為6%,電感參數辨識誤差為10%,限制了算法的應用。
文獻[11]提出了結合轉速擾動的遞推最小二乘法參數辨識,在轉子磁鏈結果收斂后辨識定子電阻,在實驗系統中辨識結果仍存在一定的誤差。文獻[12]在每個脈寬調制周期內測量電流變化率估計電感,跟蹤電感變化,具有足夠的精度,但其提高了硬件電路成本。文獻[13]將最小二乘法辨識得到的電機電阻值代入模型參考自適應法辨識永磁體磁鏈,降低了算法的收斂速度。文獻[14]改進遞歸最小二次方算法,引入電流變化率改善辨識的動態穩定性,仿真中轉矩變化時,最大辨識誤差為3.83%,該方法僅辨識了電機電感參數。文獻[15]引入帶加權因子的折息因子,降低了遞推最小二乘法中舊數據對辨識結果的影響,增強了系統參數辨識的實時跟蹤性。
現研究永磁同步電機d-q旋轉坐標系下的參數辨識模型,采用雙閉環矢量控制技術搭建仿真模型,將多新息理論與遞推最小二乘法相結合解決抗干擾能力弱等問題,采用限定記憶方法避免辨識計算中的數據飽和問題,在仿真模型中驗證所提辨識算法的有效性,并搭建實驗平臺驗證其可行性。
1 同步電機模型
1.1 PMSM數學模型
建立電機模型時,假設電機為理想條件,表貼式PMSM的定子繞組電氣對稱,忽略電機鐵芯飽和情況,則在旋轉d-q坐標系下簡化的PMSM兩相電壓方程為
(1)
式(1)中:ud、uq分別為PMSM定子d、q軸電壓;Rs為定子電阻;id、iq分別為電機定子d、q軸電流;ω為轉子電角速度;ψd、ψq分別為d、q軸磁鏈;Ld、Lq為d、q軸電感。
PMSM在d-q旋轉坐標系下的磁鏈方程為
(2)
式(2)中:ψf為轉子磁鏈。
由式(1)和式(2)可以得到PMSM在d-q坐標系下的數學模型為
(3)
對于表貼式PMSM,Ld=Lq。
1.2 參數辨識模型
基于PMSM電壓方程構造多新息參數辨識模型,對PMSM的數學模型進行離散化處理,采用歐拉近似法對電流導數進行變換為
(4)
式(4)中:Ts為采樣時間;i(k)為變量i在k時刻的值。
代入式(3)可得離散化后方程為
(5)
式(5)中:
(6)
最小二乘法的模型為
y(k)=φT(k)θ(k)
(7)
式(7)中:y(k)為系統輸出向量;φT(k)為輸入向量;θ(k)為辨識估計值。
對比式(5)與式(7),對于PMSM模型的最小二乘系統輸出向量y(k)及輸入向量φT(k)為
y(k)=iq(k)
(8)
(9)
式(6)中q軸離散方程中含有全部電磁參數φf等,因此僅對q軸方程進行推導即可表示電機電磁參數矩陣為
(10)
電機電磁參數矩陣θ(k)與各辨識參數之間的關系可表示為
(11)
2 基于多新息限定記憶的最小二乘算法
最小二乘法模型中添加誤差向量e(k),以考慮實際測試時存在的誤差為
y(k)=φT(k)θ(k)+e(k)
(12)
準則函數J(θ)定義為
(13)
通過極小化準則函數可以獲得傳統最小二乘法參數θ的估計值,這里就需要對k階矩陣進行求逆運算,增加了計算難度,所以學者們提出了計算量較少的遞推最小二乘法,即

(14)
式(14)中:
(15)
且初始狀態為
(16)

遞推最小二乘法式(14)可以理解為k時刻的估計值為前一時刻θ的估計值加上增益向量K(k)與單新息標量e(k)之積,在新時刻針對單新息進行估計值修正。多新息理論則將修正時使用的單新息標量推廣為長度為p的多新息向量,得
(17)
(18)
(19)
輸出向量可以表示為
(20)
隨著新數據的更新,以往堆積的舊數據會影響算法辨識結果的跟蹤性能,出現“數據飽和”,采用限定記憶法限定使用數據的長度為L,減少歷史數據,對數據進行更新,可得
(21)
采用多新息后,對辨識參數修正更新的遞推算法為
(22)
當數據長度大于L時,增加k+L時刻數據時剔除k時刻的觀測數據。協方差矩陣用k~k+L時刻輸入觀測矩陣Xk表示為
(23)
將式(23)協方差矩陣P(k+1,k+L)展開可得
P(k+1,k+L)=[P(k,k+L)-1-φ(k)φT(k)]-1=
P(k,k+L)+P(k,k+L)φ(k)·
[1-φT(k)P(k,k+L)φ(k)]-1·
φT(k)P(k,k+L)
(24)
將式(24)代入式(14)中,可得在k+1~k+L時刻,所有觀測數據對參數估計的結果為
(25)
采用多新息后對舊數據進行消除的遞推公式為
(26)
與單新息相比,多新息系統辨識能夠提高數據利用率及抗干擾能力。
3 仿真驗證
3.1 仿真模型
選用磁場定向控制(field oriented control,FOC)及空間矢量脈寬調制技術(space vector pulse width modulation method,SVPWM),在Simulink環境下建立系統的仿真模型,采用雙閉環模型,具體結構如圖 1所示。

θe為檢測電機轉子電角度;ia、ib、ic為檢測電機三相繞組電流;為功率管驅動信號;Ts為功率管的開關周期; Udc為逆變器母線電壓圖 1 PMSM矢量控制仿真模型Fig.1 The vector control simulation model of PMSM
該控制系統轉速環、電流環均采用PI控制器,對給定值及檢測值的誤差進行比例和積分調節,輸出交直軸電壓控制量。交直軸電壓通過坐標變換由兩相旋轉dq坐標系轉換至兩相靜止αβ坐標系下,采用空間矢量脈寬調制技術生成PWM驅動信號控制逆變器中的功率器件。
參數辨識算法模型如圖 2所示,將檢測到的電機電壓、電流及轉速信號通過傳輸延遲器形成多新息,輸入fcn函數模塊實現辨識算法后,經濾波器返回Rs、Ld、φf辨識結果進行系統自適應控制。
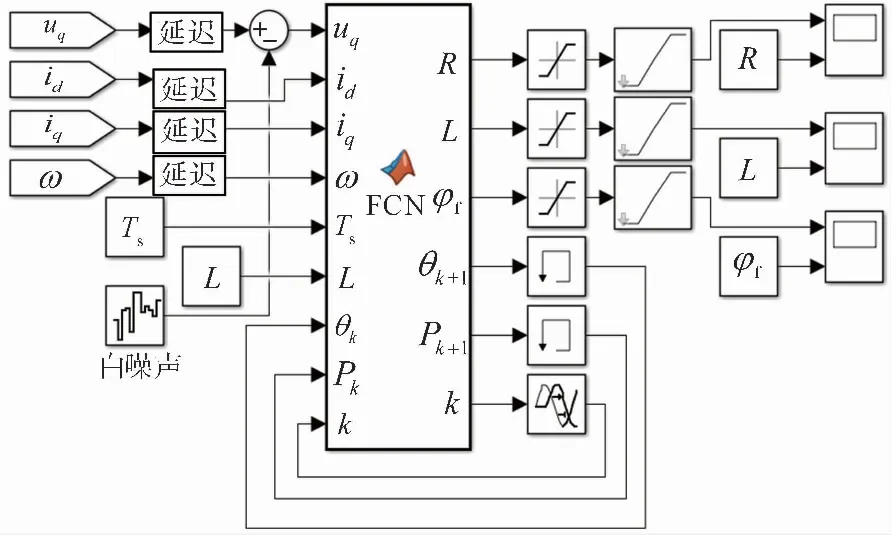
圖 2 參數辨識算法模型Fig.2 Parameter identification algorithm model
3.2 模型參數選擇
辨識算法的辨識周期設為Ts=100μs,協方差系數α為106,辨識初始值ε為10-4,限定記憶長度L為1000。
多新息參數辨識方法中p的改變對Rs、Ld和φf參數辨識結果同時產生影響,因此定義誤差函數δ(i)分析新息長度p對辨識結果整體誤差的影響為
(27)
將p設定為1~10,分析新息長度不同對辨識結果的影響,誤差對比如表 1所示。

表 1 各新息長度下參數辨識誤差Table1 Parameter identification errors under different innovation length
通過觀察可以看到隨著新息長度增大,穩態誤差減小。p=1時,算法即是單新息的限定記憶最小二乘法,多新息方法在穩態誤差方面明顯優于單新息方法。考慮辨識算法計算量及收斂速度,選新息長度p為5。
3.3 辨識算法性能分析
設定電機模型的電磁參數為恒值,電機定子電阻Rs為0.958Ω,表貼式電機交直軸電感Ld為5.25mH,電機轉子磁鏈φf為0.1827Wb。
根據模型中電機負載轉矩突變情況下的辨識結果,分析算法的抗干擾性能。給定轉速為750r/min,設置0.1s時負載轉矩由0N·m跳變至3N·m,傳統遞推最小二乘法辨識結果如圖 3所示,改進后多新息限定記憶最小二乘法辨識結果如圖 4所示。
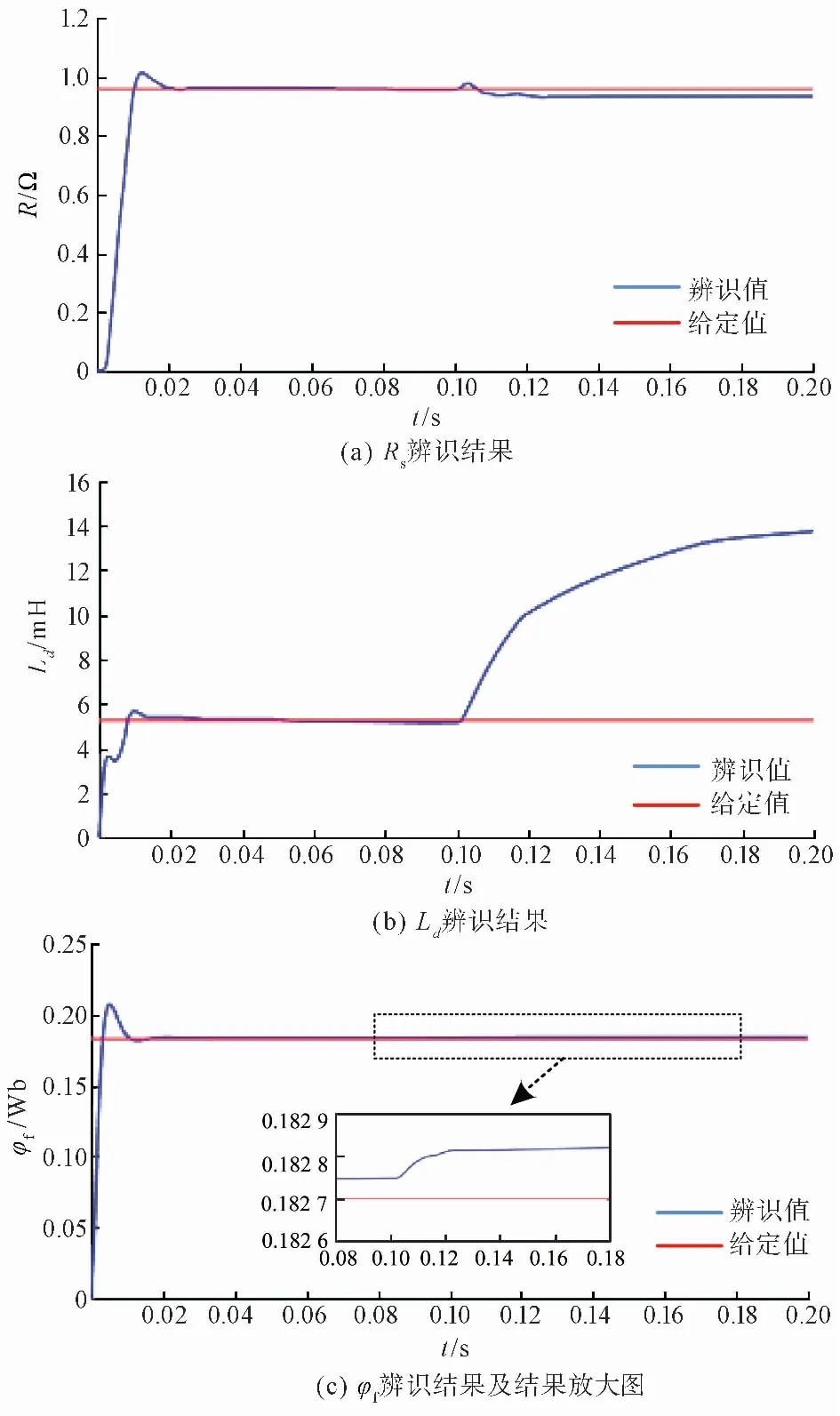
圖 3 遞推最小二乘法參數辨識結果Fig.3 Result of recursive least square method
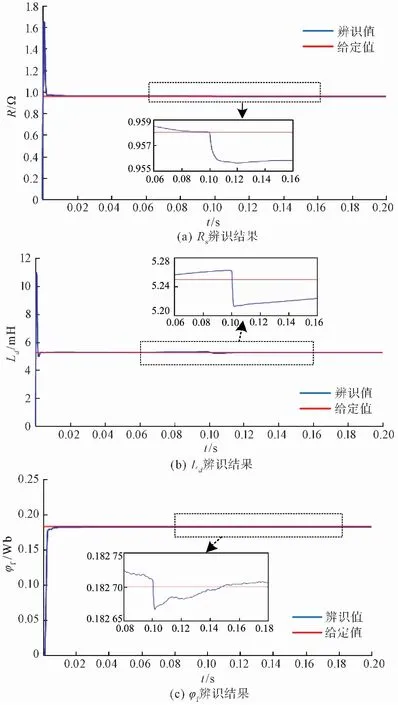
圖 4 多新息限定記憶最小二乘法參數辨識結果Fig.4 Result of multi-innovation limited memory least square method
觀察可知,遞推最小二乘法參數辨識結果在0.01s內收斂,而多新息限定記憶法收斂時間為0.008s,收斂速度更快,算法辨識精度在0.2%以內,相對遞推最小二乘算法而言具有較高的辨識精度。
表 2和表 3分別為兩種辨識方法的辨識結果分析。其中,加載辨識結果表示加載以后的0.12~0.2s時間段辨識結果的平均值,最大誤差結果表示加載后辨識誤差最大時的電機參數辨識值。
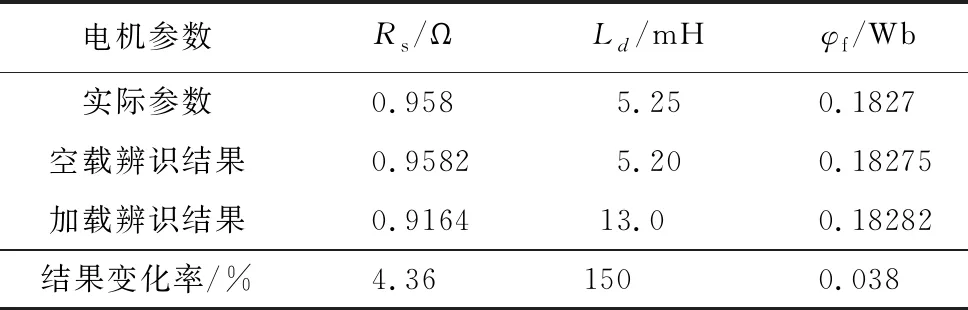
表 2 遞推最小二乘法辨識結果Table2 Result of parameter identification by RLS method

表 3 多新息限定記憶最小二乘法辨識結果Table3 Parameter identification result of multi-innovation limited memory least square method
加入負載擾動后,采用遞推最小二乘法同時辨識電機定子電阻、交直軸電感、磁鏈時,最終結果誤差較大。而從圖4中可以看出多新息限定記憶法辨識電機參數值依然能夠在0.008s內重新收斂于真實值附近,最大辨識誤差不超過0.6%,辨識結果變化率在0.4%內,抗干擾能力明顯增強。
4 實驗驗證
4.1 離線辨識
采用交流電橋對電機各相繞組電阻Rs進行測量,電路原理圖如圖 5所示,將電橋a、b兩點接至電機的兩相,另一相開路。
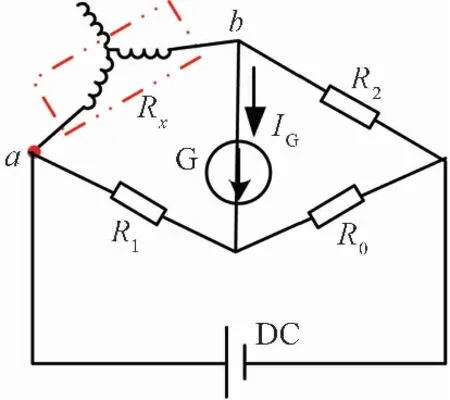
圖 5 電橋測電機電阻原理圖Fig.5 Schematic diagram of measuring motor resistance by electric bridge
當對角線電流指針為零時,通過電橋平衡式(28)由已知的R0、R1、R2電阻阻值計算出電機繞組的相電阻阻值Rs為0.958Ω。
(28)
采用電感電容電阻(LCR)測試儀測量電機任意兩相之間的電感,頻率設置為10kHz,實時測算轉子在不同位置時的電機繞組電感值,并記錄過程中最大值Lmax和最小值Lmin,然后采用式(29)計算得到交直軸電感值Ld為5.25mH。
(29)
使用電機將被測電機作為負載電機拖動至固定轉速,被測電機繞組開路,采用示波器讀取不同轉速下反電動勢幅值eap,并用式(30)計算永磁體磁鏈值φf為0.182 7Wb。
φf=eap/ωe
(30)
4.2 改進算法辨識
通過實驗驗證仿真研究成果及算法可行性,在電機轉速為750r/min,空載運行情況下,進行了在線參數辨識實驗。短時空載運行情況下,電機電流能夠控制在較小范圍內,電機內部溫升小,從而電磁參數變化較小,可以采用離線測量值作為辨識結果參考值。圖 6為Rs、Ld及φf辨識結果波形。

圖 6 電磁參數辨識結果Fig.6 Identification results of electromagnetic parameters
由圖 6 可知,系統從5.0s時開始對參數進行辨識,參數辨識結果在0.3s內收斂于離線測量結果附近。
表 4為仿真辨識結果和實驗辨識結果與離線測量值的對比。采用改進算法進行試驗驗證,同時辨識電機定子電阻、電感、永磁體磁鏈時,參數辨識結果誤差最小為0.095%,最大為4.2%。

表 4 辨識結果對比Table4 Comparison of identification results
由表4可以看出,仿真辨識結果精度更高,實驗辨識結果依然受模數轉換及電路采樣精度等硬件電路約束影響,相對仿真辨識結果精度較低。
5 結論
提出了一種基于多新息的限定記憶最小二乘算法的永磁同步電機參數辨識方法,在MATLAB/Simulink中搭建仿真模型,在電機運行轉矩擾動情況下,采用所提出方法進行辨識,結果顯示多新息限定記憶最小二乘法的辨識能夠迅速、穩定地收斂于真實值附近,有效解決“數據飽和”及收斂速度慢等問題。通過實驗證明了所設計辨識算法能夠實現對電機電磁參數快速、準確的辨識,具有較好的跟蹤性能和魯棒性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19