基于圖像邊緣識別的面內振動位移測試方法?
2021-06-26 11:18:38韓玉迎杜金香王敏慶盛美萍
振動、測試與診斷 2021年3期
關鍵詞:振動
韓玉迎,王 晨,杜金香,王敏慶,盛美萍
(1.西北工業大學航海學院 西安,710072)(2.西北工業大學寧波研究院 寧波,315103)
引言
振動測試結果可作為機械設備的故障診斷和減振降噪優化設計的主要依據。為滿足大部分工程測試需求,振動測試方法需具備操作簡單、數據處理方便等條件。傳統的振動測試方法主要通過多種傳感器直接測量[1]或傳感器測量結果與有限元分析相結合[2]的方式,來達到獲取實驗件動力學特性的目的。但是傳統的振動測試方法往往會存在測試系統安裝繁瑣、布線復雜及多傳感器間同步測試困難等問題。在一些傳統測試方法應用受限或測試精度要求較弱的場合,采用具有靈活、非接觸、數據存儲量大及相對便宜等優點的數碼攝像機作為傳感器,已成為一種有效的替代方案。
以攝像機為傳感器的測試系統主要用于設備的故障診斷[3]與工作狀態監控[4‐5]等場合,具有測試系統簡單、成本低、可直接獲取高精度位移[6]等優勢。為了促進這種測試系統的應用,不少學者對測試系統中攝像機在不同測試條件下的使用情況、應用范圍及其關鍵技術進行了討論。文獻[7‐8]分別在測試空間條件充足和測試空間條件有限時,利用攝像機代替傳統振動測試系統中的傳感器和調理器,實現了對傳統測試系統的簡化。文獻[9‐10]證明了攝像機的空間分辨率有助于最簡便快速地獲得復雜結構的動態力學參數。這些以攝像機為傳感器的振動測試結果會受到圖像處理精度的影響。Hieu 等[11]分析了攝像機三維成像測量系統,指出邊緣形狀檢測是一種重要的圖像處理方法。文獻[12‐13]分別證明了圖像邊緣識別方法和待識別的圖像內容對獲取被測結構的振動信息有影響。要獲取試件更為全面的振動信息,需發展合適的圖像處理方法,尤其是圖像邊緣的處理方法,對攝像機的視頻圖像進行處理。
傳統的圖像邊緣檢測方法主要利用Roberts 算子、Sobel 算子及Canny 算子等實現邊緣檢測的目的,這些方法的檢測結果容易受到噪聲的影響。為了降低噪聲對邊緣檢測結果的影響,現代的邊緣檢測方法引入了分析數學、形態學數學和模糊數學等經典計算方法,卻帶來了計算量大、檢測精度低等缺點。魏偉波等[14]認為針對特定需求,需要設計特定的圖像邊緣檢測方法,使其具有計算簡單、能平衡檢測精度和抗噪性能之間矛盾等性能。當圖像含有不同形式的噪聲時,文獻[15‐17]分別對Sobel 算子的邊緣檢測方法進行了改進,以獲取較高精度的圖像邊緣信息。當圖像分辨率有限、圖像邊緣不連續時,文獻[18‐19]分別對Canny 算子的邊緣檢測方法進行了改進,以增強圖像邊緣提取效果。
為了在目標物體邊緣不清晰時獲得足夠的圖像處理精度,筆者主要針對Sobel 算子的邊緣識別結果中虛假邊緣和不連續邊緣等缺陷,首先,提出一種改進的圖像邊緣檢測方法,為準確獲取目標物體的位置信息奠定基礎;其次,進一步建立目標物體振動與其視頻圖像像素變化之間的對應關系,從而將圖像信息轉換為振動信息;最后,搭建以攝像機作為傳感器的振動測試系統,并開展相關振動測試來驗證所提出的測試方法的有效性。
1 振動源的圖像預處理
在使用數碼攝像機作為傳感器進行振動測試時,由于拍攝過程中的光線、噪聲、模糊等不確定因素的存在,所獲得的視頻圖像中目標物體的邊緣可能會出現間斷、變寬等現象。這些現象不利于視頻中目標圖像的獲取,通常需要對視頻圖像進行圖像類型轉換、銳化、特征提取及去噪聲等預處理,以增強圖像邊緣檢測的有效性。經典的圖像邊緣檢測主要是利用圖像灰度變化的局部極大值,通過差分算子來直接獲取背景與物體之間較為精確的邊界。但實際上,利用這些方法目標物體自身的灰度變化通常也會被識別,從而對識別結果產生干擾。這些干擾會對目標物體振動信號的獲取產生不利影響,而對目標圖像中心部位進行標記來避免邊緣檢測帶來的誤差,在目標物體振動情況復雜時并不適用。目標物體的經典邊緣檢測結果主要由圖像像素梯度函數[20]的零點組成,記為集合A,但是這樣獲得的目標物體邊緣點集合A往往會存在一些虛假邊緣。
為了剔除這些虛假邊緣,筆者提出了一種改進的圖像邊緣檢測方法,其流程圖如圖1 所示。可以看出,在獲取經典邊緣檢測結果之后,筆者改進的圖像邊緣檢測方法主要通過閾值檢測函數來實現邊緣選擇,達到剔除某些虛假邊緣的目的。這樣可以去除由光線、紋理等引起的圖像虛假邊緣,得到目標物體的邊緣區域B。此時這些邊緣由目標物體的內邊緣和外邊緣構成,不能直接用于獲取目標物體的分布區域。對目標物體的邊緣包絡進行求解,可剔除集合B中內邊緣,得到目標物體的外邊緣C。但是這樣得到的外輪廓C往往是分段的,不利于獲得目標物體的最大聯通區域,以進行圖像特征提取。針對集合C中的分段不連續部分,利用分段插值函數[21],可得到目標物體連續的改進的邊緣C′。至此,所提出的改進方法剔除了圖像中虛假邊緣,補償了不連續邊緣,得到了更為精確的視頻圖像處理結果。

圖1 改進的圖像邊緣檢測流程圖Fig.1 The flow diagram of improved image edge detection
在獲取每幀圖像目標物體的邊緣之后,與靜止狀態的邊緣進行對比,即可得到視頻中目標物體運動狀態隨時間的變化。由攝像機成像原理可知,目標物體的振動位移與其在圖像中運動狀態呈正比例關系,且其比例系數k與攝像機中物像縮放比例系數一致。在測試之前,k可由棋盤格對攝像機進行定標得到[5]。根據攝像機的視頻幀速率[22](frames per second,簡稱FPS)和視頻中目標物體位移變化情況,通過快速傅里葉變換(fast Fourier transform,簡稱FFT)[22],可得到被測物體的振動隨頻率變化結果。
按照上述視頻圖像處理步驟,由攝像機作為主要傳感元件的振動測試系統,可在一定照明系統的輔助下準確獲取目標物體的振動信息,實現振動測試的目的。
2 振動測試系統組成
以視頻圖像為振動信號的振動測試系統如圖2所示。其中目標物體通過螺紋桿安裝于激振器上,上位機利用信號發生器與功率放大器調控激振器的振動狀態,并通過與激振器平行放置的、固定在安裝支架上的攝像機盡可能多地記錄目標物體的振動信息。在實驗過程中,通過水平移動安裝支架,可調整二者之間的距離,以確保攝像機視野內被測目標物體清晰。此外還需要調整安裝支架的垂直高度,以確保攝像機的視野中心與被測目標物體中心位置相重合。
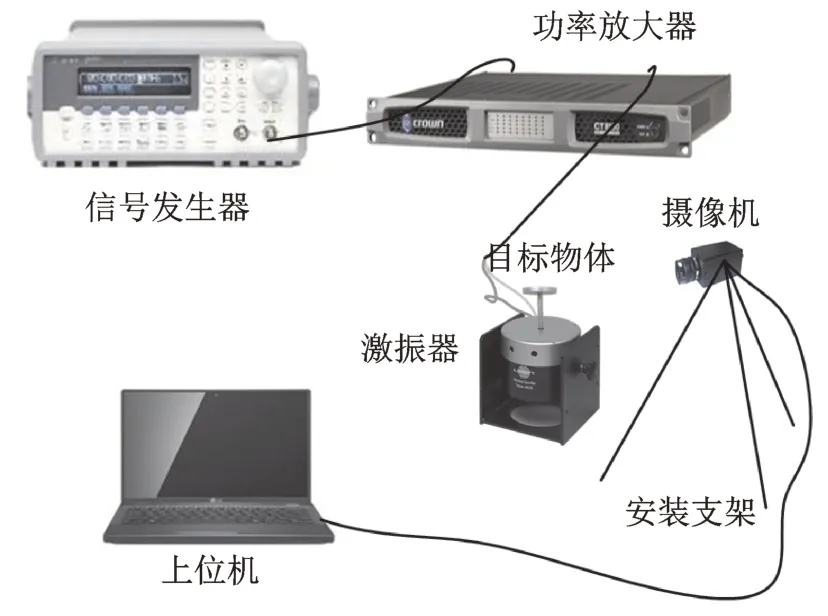
圖2 測試系統示意圖Fig.2 The schematic diagram of experiment system
在實際工程應用中,在傳感器安裝空間受限的測試場合,本測試方法可作為一種替代方法,根據攝像機與安裝平面之間的相對運動,對被測物體的振動進行測試。在經典的振動測量模式中,慣性式測量模式需要將傳感器直接固定于被測物體表面進行測量;而相對式測量模式,需要將傳感器固定在參考體上[23]。攝像機作為一種典型的相對式傳感器,只有其安裝支架位于振動可忽略的地面或平面時,可有效避免攝像機與基體耦合振動引起的誤差。當攝像機支架的振動不可忽略時,可在攝相機支架的水平儀位置安裝慣性式傳感器,根據傳感器與攝像機同步采集的振動結果,對攝像機所得到的振動數據進行補償。測試過程中,攝像機支架的安裝位置相對平穩,可直接將攝像機所記錄的視頻按照圖3 所示的流程圖進行處理,得到對應的振動信息。此外還需要記錄多次測量結果,并對其求平均值,以避免單次測量誤差。由圖3 可知,對攝像機所記錄的目標物體圖像需要經過灰度處理、圖像銳化以及邊緣處理等圖像處理操作[24],才能得到所關心的振動響應。

圖3 振動信號獲取流程圖Fig.3 The flow diagram of getting vibration signals
在圖像處理的過程中,分別對比了經典的圖像邊緣識別方法和本研究改進的邊緣識別方法,其結果如圖4 所示。由圖可知,相比于經典的邊緣識別方法,改進的方法能夠較為精確地獲取目標物體的外邊界,降低圖像邊緣識別誤差,提高目標物體振動分析的精度。根據所得到的目標物體輪廓,可計算得到被測物體的振動位移的頻域結果。在測試過程中通過任意設置多個不同的振動頻率進行測試,以驗證振動分析結果的準確性。
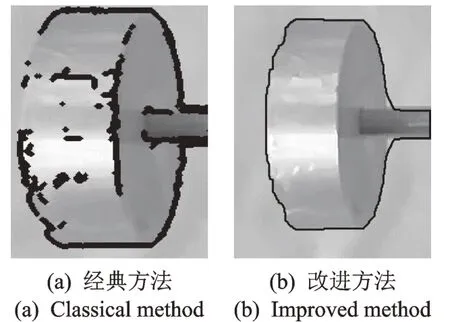
圖4 目標物體邊緣檢測結果Fig.4 The edge detection results for target object
3 測試結果分析
為了驗證本研究改進的圖像處理算法的有效性,利用傳統振動測試方法來獲取目標物體的準確位移。傳統振動測試方法中,振動傳感器粘貼于被測物體表面,并利用與傳感器配套的信號調理器和分析儀來得到目標物體精確的測試結果。根據傅里葉變換原理,結構的位移幅值通常可由頻率f處的加速度a直接求得。
按照圖2 所示的測試系統,在實驗室照明充足、安裝支架的基體結構與攝像機之間不存在振動耦合的情況下,設置信號發生器使激振器產生振動,調整攝像機安裝支架的高度和位置,開啟攝像機對目標物體的振動進行測試,存儲相應的測試視頻結果。通過計算機對攝像機所存儲的視頻結果進行讀取和分析,得到目標物體的振動信息。同時采集目標物體的加速度得到其位移,并將其與圖像處理結果進行對比,驗證圖像測試方法的準確性。實驗現場如圖5 所示。

圖5 實驗現場圖Fig.5 The experimental site
如圖5(a)所示,實驗中加速度信號由連接激振器(JZ‐5)和目標物體的阻抗頭(B&K 8001)采集,并通過電荷放大器(B&K 2692)和分析儀(B&K 3050)傳遞至上位機,從而實現傳統振動測試方法的信號采集、分析和處理。筆者提出的振動測試方法主要通過固定于安裝支架上的攝像機(FL3‐U3 ‐13S2C),對與攝像機視野中心平齊的目標物體振動進行采集,并通過USB 端口將視頻圖像的采集結果傳遞至上位機,實現振動信號的分析和處理。在測試系統中,信號發生器(Agilent 33202A)產生的激勵信號通過功率放大器(Crown CT8150)作用于激振器,使得目標物體產生振動。含有目標物體的被測裝置如圖5(b)所示,可通過圖中的安裝孔,將其固定于振動臺上,以盡量減小其與其他測試裝置之間的耦合振動。測試過程中發現,振動臺的振動相比于被測物體的振動是可以忽略的。主要實驗設備的性能配置如表1 所示,由表可知,這些激勵和測試設備能滿足大部分情況下的測試需求。
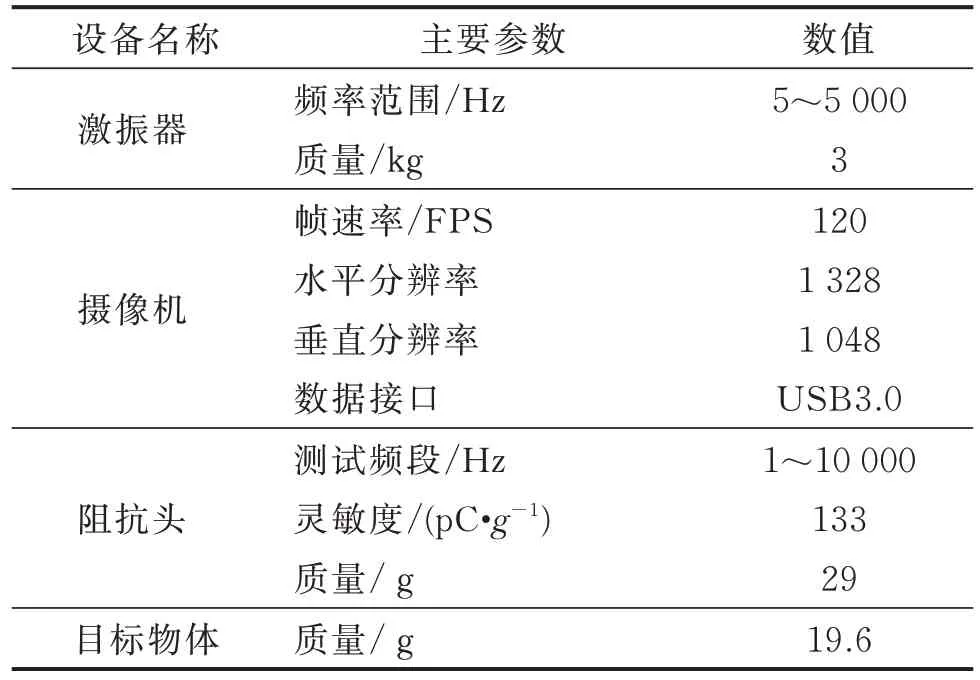
表1 部分測試設備的主要參數Tab.1 The main parameter of most equipment
在測試過程中,將攝像機的FPS 設置為60 Hz,這樣可在0~30 Hz 的頻率范圍內任意生成正弦激勵信號,再利用加速度傳感器和攝像機同時對目標物體的振動進行多次測量和記錄。利用原有的圖像處理算法和筆者改進的算法分別對多次測量的視頻結果進行計算,并將其與傳統振動測試方法的測試結果進行對比,得到如圖6 所示的對比結果。
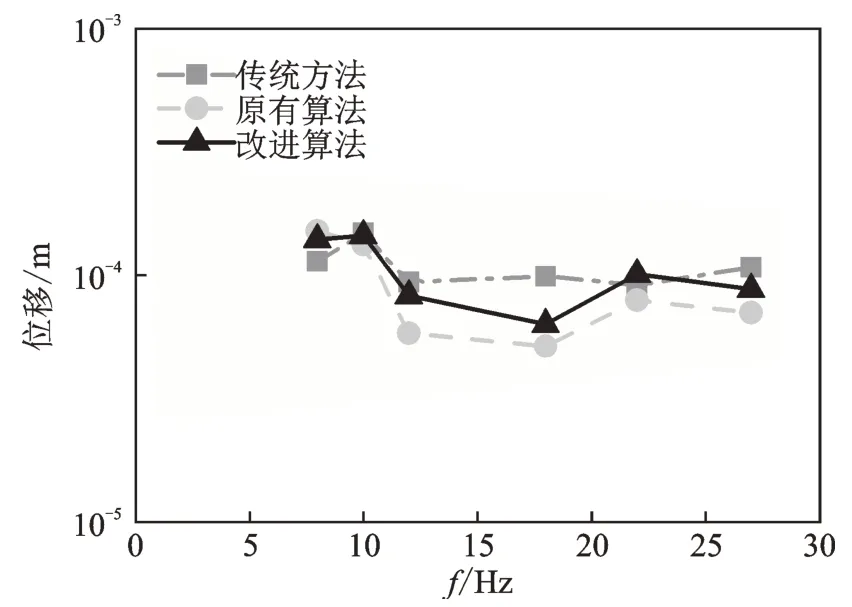
圖6 3 種方法對比結果Fig.6 The comparison results of three method
由圖6 可知,與原有圖像處理算法相比,改進算法得到了更接近于傳統測試方法的測試結果。且本研究采用的測試系統相比于原有測試系統具有結構簡單、使用方便、價格低廉等優點。為了量化本改進方法的優勢,以圖像處理方法相對于傳統方法的相對誤差|er|作為主要評價指標

其中:參考值wr為傳統方法所得到的計算結果;wt為根據視頻圖像分析所得到的位移。
根據圖6 所示的測試結果和式(1)可知,本研究改進算法的|er|比原有算法平均降低了12%。由此可知,改進算法在計算目標物體的位移幅值時具有更高的計算精度。
為了驗證本研究算法對目標物體振動方向的識別能力,按照圖7 所示調整目標物體的振動方向。在測試過程中,任意選取頻率為10,25,40 Hz 的目標物體振動響應,按照圖3 所示的流程圖分析得到如圖8~10 所示的目標物體振動位移響應結果。為了減少數據量,在滿足采樣定律的情況下,當激勵頻率為10,25,40 Hz 時,分別設置攝像機的幀速率為30,60,110 Hz。為了獲得足夠的頻率分辨率,設置每個視頻的采集時長為1 min。
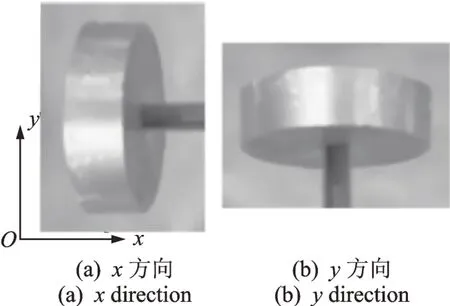
圖7 截取目標物體振動方向示意圖Fig.7 Schematic of vibration direction about target object
當激勵頻率為10 和25 Hz 時,攝像機拍攝得到如圖7(a)所示的目標物體,經過圖像處理,得到如圖8 和圖9 所示的振動位移結果。由圖8 中可以看出,此時目標物體的振動頻率為10 Hz,其振動方向為圖像中的x方向。由圖9 可知,目標物體的振動頻率為25 Hz,方向為x方向。當激勵頻率為40 Hz 時,目標物體的圖像對應圖7(b),通過圖像處理得到如圖10所示的位移結果。由圖10 可知,此時目標物體的振動方向為圖中的y方向,振動頻率為40 Hz。
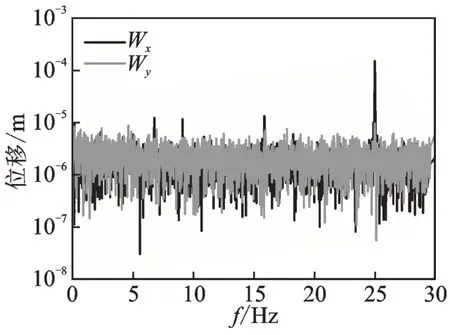
圖9 在25 Hz 激勵頻率下的振動源振動面內位移Fig.9 The in-plane displacement of target object under 25 Hz
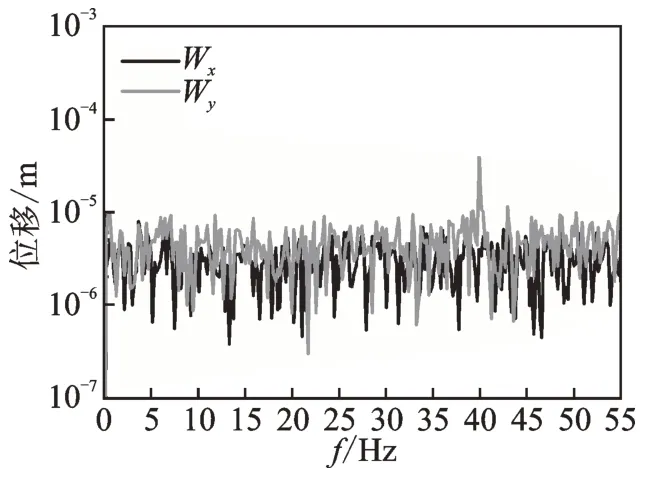
圖10 在40 Hz 激勵頻率下的振動源面內振動位移Fig.10 The in-plane displacementof target object at 40 Hz
由圖6 以及圖8~10 可以看出,本研究所改進的圖像處理方法能夠準確獲取目標物體在振動方向上位移的大小和方向,但在非振動方向也得到了輕微的擾動位移結果。這些擾動與圖像分析中目標提取的精度和圖像分辨率有關系,這種現象可通過使用更高分辨率的攝像機來避免。
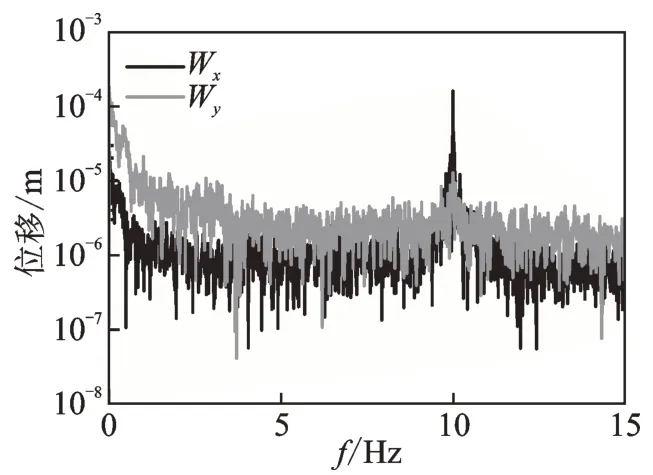
圖8 在10 Hz 激勵頻率下的目標物體面內振動位移Fig.8 The in-plane displacement of target object under 10 Hz
由上述實驗結果可以看出,在振動圖像測試中采用筆者改進的圖像處理方法后,同時獲得了振動源的振動方向、頻率及大小等信息,具有非接觸、不受工頻噪聲影響等優點。此外,文中視頻圖像中目標物體振動數據的處理主要在視頻采集結束之后進行,在不需要實時給出振動測試結果的應用場合,其測試系統即可滿足需求;而當需要實時獲取目標物體的振動信息時,則需要編寫視頻圖像實時處理軟件,來實現對振動信息的實時處理。
4 結束語
提出了一種改進的圖像邊緣提取方法以解決目前圖像識別中目標物體邊緣不清晰的問題。在此基礎上,利用常規振動測試儀器和攝像機,實現了所提出的振動測試方法,并通過實驗驗證了本研究改進的圖像處理方法的精確性和有效性。實驗結果表明,相比于原有的圖像處理方法,所提出的改進的圖像邊緣識別方法能更準確地獲得目標物體在不同激勵頻率下的振動位移。這種方法降低了經典圖像邊緣識別結果中虛假邊緣和不連續邊緣對測試結果的影響,得到了目標物體更完整的邊緣,實現了更高精度的視頻圖像處理。當攝像機的像素得到提高時,利用所提出的測試系統可進一步獲得更高精度的位移測試結果;但當目標物體的形狀趨于復雜或其內部產生形變時該方法還需進一步改進。總的來說,這種測試系統具有操作簡單、數據信息量大、環境適應性強等優點,可在常見測試系統的基礎上,為工程測試提供更多的選擇。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00