集成式巡航系統斜線干擾問題場景虛擬化測試方法研究*
2021-07-03 04:10:22鄭磊周祥祥鄭望曉張志聰
汽車實用技術 2021年12期
關鍵詞:系統
鄭磊,周祥祥,鄭望曉,張志聰
(廣州汽車集團股份有限公司汽車工程研究院,廣東 廣州 511434)
前言
集成式巡航輔助系統在進行道路測試過程中,發現對于道路上遺留的舊車道線存在異常偶發干擾,方向盤有轉向波動的現象,道路試驗過程中遇到的遺留異常車道線比較隨機,無法進行量化測試對比,進而無法確定道路上遺留斜線斜度對橫向控制的干擾量化指標。針對此問題,將此類場景通過PreScan軟件進行測試場景虛擬化,設計出連續的不同角度的斜穿車道線場景,開展量化測試,確認不同角度下對橫向干擾的概率。
本文通過研究集成式巡航輔助系統的工作原理和觸發條件,利用仿真軟件PreScan搭建用于測試集成式巡航輔助系統的虛擬測試仿真環境,在整車主動安全系統車輛在環測試臺架上開展虛擬測試[1-7]。
1 集成式巡航輔助系統工作原理
集成式巡航輔助系統主要傳感器(前視攝像頭+前向毫米波雷達)、控制器和執行器(EPS和ESP)三份組成,通過前視攝像頭實時獲取前方道路信息,讀取車道邊界和視野內的目標,同時結合前向毫米波雷達的探測結果,確定當前車道內的主目標,通過EPS將車輛控制在當前車道固定的橫向位置處,根據探測到的主目標的縱向速度實時調整本車縱向速度。作為輔助駕駛系統,系統可通過EPS或者其他手力傳感器實時監測駕駛員的脫手狀況,當駕駛員連續脫手時長達到不同提醒級別閾值時,系統以不同的方式提醒駕駛員接管方向盤,若駕駛員及時接管方向盤,則系統繼續保持激活狀態,對車輛的橫向和縱向進行自動控制,若駕駛員未及時接管方向盤,則系統自動退出。集成式巡航輔助系統的控制系統架構見圖1。
2 試驗設備
整車主動安全系統車輛在環虛擬驗證平臺主要由四驅轉鼓、高清投影儀、投影儀升降器、激光水平儀、幕布和幕布升降器組成。
四驅轉鼓作為試驗車輛的運動平臺,試驗過程中按照試驗車速配置轉鼓車速,試驗車輛固定時確保前視攝像頭中心點落在投影儀燈泡中心點和幕布中心點的連線與地面的垂面上,該垂面通過激光水平儀獲取。高清投影系統將搭建的虛擬場景呈現出來,以供試驗車輛攝像頭進行讀取,虛擬場景中車輛模型搭載的前視攝像頭模型參數按照試驗車輛前視攝像頭參數進行設置;幕布上投影畫面的大小按照前視攝像頭在幕布上的視景大小進行調整。車輛在環虛擬驗證平臺間圖2。
3 測試用虛擬場景搭建
針對某車型道路試驗過程中遇到的問題場景,進行場景虛擬化復現,并依據該場景類型進行拓展,搭建不同斜度斜線虛擬場景,以開展斜線穿越道路場景的量化測試,道路試驗過程中的問題場景見圖3,虛擬化復現場景見圖4,不同角度斜線場景示例見圖5-8。

圖3 道路試驗問題場景

圖4 虛擬化復現場景

圖5 斜線角度1°場景

圖6 斜線角度10°場景

圖7 斜線角度30°場景

圖8 斜線角度60°場景
4 試驗方法
虛擬場景的搭建,主要是針對集成式巡航輔助系統在道路試驗過程中遇到的遺留斜穿車道線橫向控制受干擾問題搭建的模擬3D交通環境,主要包括不同斜度斜穿線,研究不同斜度斜線對于橫向控制的干擾程度和概率,斜線角度設計見表1。
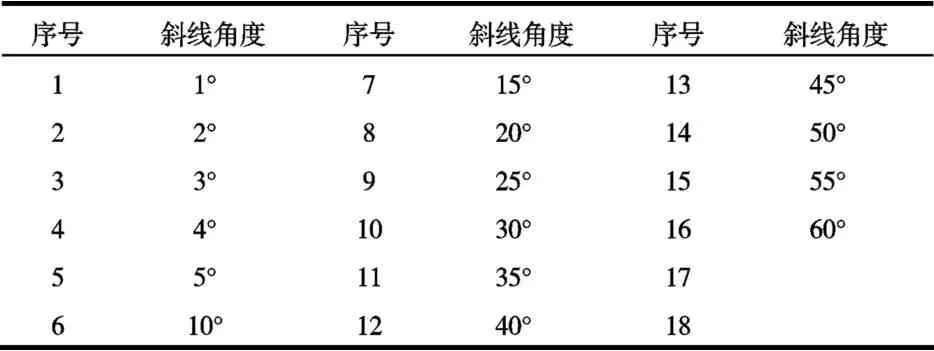
表1 虛擬場景斜線角度參數
由于集成式巡航輔助系統目標探測是由前視攝像頭和前向毫米波雷達融合結果,在實際測試過程中,前視攝像頭采集的是虛擬場景中的數據,前向毫米波雷達采集的是實際環境下的數據,試驗車輛前方放置的散熱風機會讓雷達誤檢測為距離過近的目標車而自動減速,測試過程中需要保持override狀態,維持車速穩定,確保集成式巡航輔助系統激活的同時,試驗車輛實際車速與虛擬場景中的車輛模型車速一致。
5 測試結果分析
通過對不同角度斜線的場景進行測試,得出在斜線角度≤4°時,橫向控制受干擾概率為100%,斜線角度≥10°時,橫向控制受干擾概率基本為0%,斜線角度5°為分界點,如圖9所示。
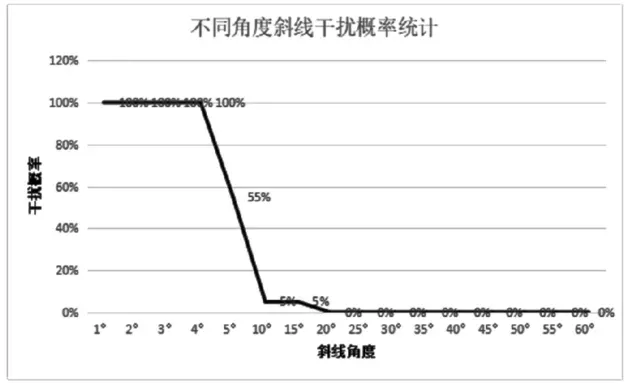
圖9 不同角度斜線干擾概率測試結果
在實際的道路條件下,不論是因為道路地形限值,車道線出現折線形式,還是因為臨時的引導線未被完全清除,車輛經過此等道路時,橫線控制都會出現異常的波動,甚至導致車輛橫向控制異常偏出當前車道,車道線的擬合算法可以從以下兩個方面進行優化,一是確認是否左右兩側車道線均存在相同的斜線,常規的車道線均為兩側平行存在的標線;二是確認是左右兩側出現的斜線是否存在其他相交的車道線,通過比對車道線的長短,延伸方向與道路特征如路肩進行區分確認實際車道線。通過優化車道線的識別進而優化橫向控制的穩定性,提高集成式巡航輔助系統的場景適應能力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32