
捷聯(lián)慣性基組合導(dǎo)航魯棒UKF方法
2021-07-06 13:56:02張夢(mèng)得胡柏青趙仁杰田佳玉
艦船科學(xué)技術(shù) 2021年6期
關(guān)鍵詞:方法
張夢(mèng)得,胡柏青,趙仁杰,田佳玉
(海軍工程大學(xué) 導(dǎo)航工程教研室,湖北 武漢 430033)
0 引 言
組合導(dǎo)航系統(tǒng)是將2 種或者2 種以上的非相似導(dǎo)航系統(tǒng)的輸出進(jìn)行綜合處理,獲得更高的導(dǎo)航精度與可靠性[1-2]。最常見的組合導(dǎo)航系統(tǒng)是以慣導(dǎo)為核心的慣性基組合導(dǎo)航系統(tǒng)[3-4]。捷聯(lián)慣導(dǎo)(Strapdown Inertial Navigation,SINS)具有用數(shù)字平臺(tái)代替實(shí)體平臺(tái),結(jié)構(gòu)簡(jiǎn)單,體積小,重量輕等特點(diǎn),成為研究的熱門[5]。然而SINS 卻存在導(dǎo)航精度隨時(shí)間發(fā)散的問(wèn)題,無(wú)法僅僅依靠自身校正誤差[6]。這就是SINS 需要與其他導(dǎo)航設(shè)備進(jìn)行組合導(dǎo)航的原因,常見的基于捷聯(lián)慣導(dǎo)的組合系統(tǒng)可以應(yīng)用在陸用導(dǎo)航(GPS、羅蘭C、里程計(jì))、水下導(dǎo)航(多普勒計(jì)程儀、基線系統(tǒng))、航空航天以及無(wú)人系統(tǒng)導(dǎo)航等領(lǐng)域[7-9],然而,實(shí)現(xiàn)慣性基組合導(dǎo)航的關(guān)鍵技術(shù)就是組合濾波方法[10]。
在現(xiàn)代濾波技術(shù)中,1995 年由S.J.Julier 和J.K.Uhlmann 提出的無(wú)跡卡爾曼濾波算法(Unscented Kalman Filter,UKF)一直是研究的熱點(diǎn),該算法通過(guò)UT 變換可以不忽略泰勒展開的高階項(xiàng),從而在非線性系統(tǒng)中有較高的估計(jì)精度和穩(wěn)定性,受到了廣泛的關(guān)注[11]。在捷聯(lián)慣性基組合導(dǎo)航的實(shí)際應(yīng)用中,估計(jì)的精度與實(shí)時(shí)性都是需要考慮的問(wèn)題,UKF 不太大的計(jì)算量與較高的精度導(dǎo)致其成為了一種可行非線性的濾波方法,這也是其成為研究熱點(diǎn)的原因之一。
在捷聯(lián)慣性基組合導(dǎo)航實(shí)際應(yīng)用中,捷聯(lián)慣導(dǎo)自身比較穩(wěn)定,不易受到干擾,而環(huán)境情況復(fù)雜多變,使得量測(cè)量難以避免的會(huì)被污染、干擾,這會(huì)對(duì)UKF的精度造成較大的影響,甚至導(dǎo)致濾波器的發(fā)散,進(jìn)而影響到組合導(dǎo)航的效果。比如在城市中使用SINS/GPS 系統(tǒng),可能存在衛(wèi)星受到信號(hào)遮擋、信號(hào)受到干擾的情況;在水下使用SINS/DVL 系統(tǒng),可能存在水流速或者水底地形的變化導(dǎo)致的測(cè)速異常等問(wèn)題。如何提高濾波的抗干擾能力,提升組合導(dǎo)航系統(tǒng)的穩(wěn)定性是UKF 在實(shí)際應(yīng)用中必須要解決的問(wèn)題。傳統(tǒng)的魯棒方法是通過(guò)增加量測(cè)噪聲矩陣的權(quán)重以削弱野值對(duì)濾波的影響,但是這樣會(huì)犧牲濾波一定的估計(jì)精度[12]。文獻(xiàn)[13]對(duì)魯棒濾波在初始對(duì)準(zhǔn)動(dòng)基座中的應(yīng)用進(jìn)行了研究,文獻(xiàn)[14]對(duì)改進(jìn)的Huber 魯棒濾波進(jìn)行了研究,通過(guò)文獻(xiàn)[15]使用支持向量回歸的方法提高組合導(dǎo)航系統(tǒng)的魯棒性。
針對(duì)捷聯(lián)慣性基直接法組合導(dǎo)航系統(tǒng)實(shí)際使用中出現(xiàn)的量測(cè)量中出現(xiàn)野值的問(wèn)題,本文提出一種基于一類支持向量機(jī)輔助的適用于捷聯(lián)慣性基組合導(dǎo)航的魯棒UKF 算法(Support Vector Machine-Adaptive UKF,SVM-UKF)。本方法首先使用一類支持向量機(jī)(Support Vector Machine,SVM)建立滑動(dòng)窗,來(lái)辨別濾波中的新息是否為異常,對(duì)于正常新息不予處理,對(duì)于異常的新息采用指數(shù)加權(quán)的方法得到新的“正確”新息以替代野值新息,這樣不但可以修正量測(cè)值,還可以提高該情況下濾波的估計(jì)精度,提高系統(tǒng)的魯棒性,根據(jù)江試實(shí)驗(yàn)數(shù)據(jù),對(duì)SINS/GPS 系統(tǒng)使用SVM-UKF 與常規(guī)UKF,RUKF 濾波組合導(dǎo)航的精度進(jìn)行比較。實(shí)驗(yàn)結(jié)果表明,在量測(cè)量有野值污染的情況下,SVM-UKF 具有更高的估計(jì)精度。
1 基于一類SVM 的野值識(shí)別與處理
對(duì)于量測(cè)量中野值的辨別,一類SVM 具有適用于小樣本,非線性等特點(diǎn),只需要正常工作的小樣本數(shù)據(jù)就可以進(jìn)行模型的訓(xùn)練,非常適用于野值的辨識(shí)。一類SVM 本質(zhì)是通過(guò)在特征空間中尋找超平面對(duì)正常樣本與異常樣本進(jìn)行分離,如圖1 所示。
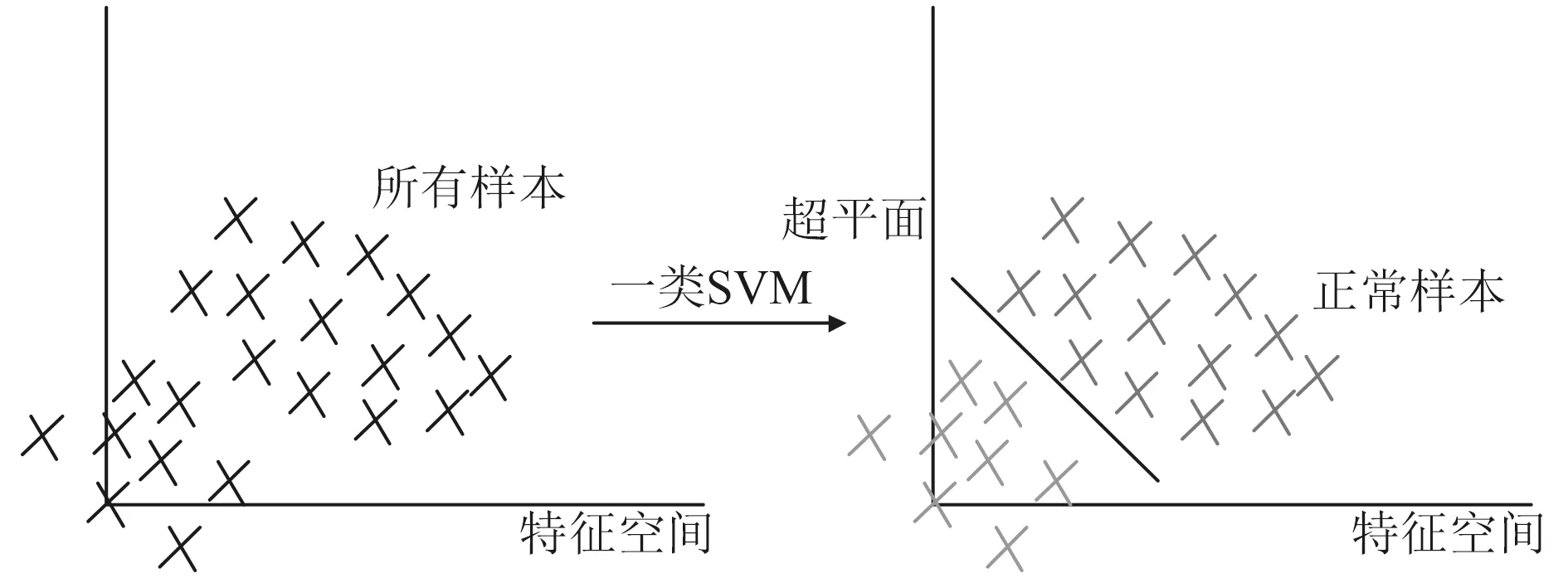
圖1 一類SVM 分類基本原理圖Fig.1 Graphical illustration of 1-class SVM
1.1 訓(xùn)練方法
一類SVM 的在線訓(xùn)練流程如下:
1)構(gòu)建新息樣本滑動(dòng)窗
選取n個(gè)連續(xù)的不含野值的新息數(shù)據(jù)組作為訓(xùn)練信息樣本滑動(dòng)窗X=[x1,x2,···,xn]T,式中x表示新息。規(guī)范化訓(xùn)練新息滑動(dòng)窗中每一個(gè)向量x。對(duì)規(guī)范化后的新息滑動(dòng)窗進(jìn)行主元分析得到目標(biāo)向量矩陣Y:

式中:PPC=[p1,p2,···,pn]∈RN×l表示主元矩陣;y為支持向量;l為特征空間的維數(shù)。
2)訓(xùn)練一類SVM 模型
根據(jù)新息樣本滑動(dòng)窗訓(xùn)練得到的目標(biāo)向量矩陣Y,訓(xùn)練一類SVM 模型為:

約束條件為:
式中:α=[α1,α2,···,αn]T表示優(yōu)化權(quán)值向量;Hij=K(yi,yj),yi,yj∈Y,K(yi,yj)=e-‖xi-x j‖2/2σ2為核函數(shù);v∈{0,1}是置信水平,用來(lái)表示允許訓(xùn)練新息樣本出現(xiàn)錯(cuò)誤被分類的程度。
3)計(jì)算偏移量
式中:b為偏移量;ns為y的個(gè)數(shù)。設(shè)定置信水平v的值,將新息樣本滑動(dòng)窗中的新息按從大到小的順序排列,若驗(yàn)證數(shù)據(jù)樣本的大小為n,則取第v×n個(gè)新息值為閾值Jn。
1.2 檢測(cè)方法與野值處理
1)計(jì)算目標(biāo)向量
將待檢測(cè)新息數(shù)據(jù)x′,加入到新息樣本滑動(dòng)窗X中得到新樣本,對(duì)x′進(jìn)行規(guī)范化,根據(jù)式(1)得到目標(biāo)向量:

2)計(jì)算距離檢測(cè)量
本文采用文獻(xiàn)[16]提出的使用一類SVM 模型的相反數(shù)作為檢測(cè)量的方法,計(jì)算距離檢測(cè)量為:

2)野值的識(shí)別與處理
1)新息的野值識(shí)別
若F(t)<Jn,則新加入的新息x′為正常值;若F(t)>Jn,則可以認(rèn)定新息x′為野值,證明相對(duì)應(yīng)的量測(cè)值為野值。
2)野值處理
傳統(tǒng)的處理方法大多為將野值剔除,如果有數(shù)量較多的野值,剔除的方法有可能造成濾波的估計(jì)精度下降甚至發(fā)散。本文采用指數(shù)加權(quán)的方法,通過(guò)對(duì)滑動(dòng)窗內(nèi)正常的新息進(jìn)行賦權(quán),估計(jì)出野值新息處的“正確”新息,以替代野值新息。按照時(shí)間軸距離野值越近的新息權(quán)值越高,越遠(yuǎn)的新息權(quán)值越低,目的是使得越靠近野值的正常新息越能在對(duì)野值新息的估計(jì)中占有更大的比重。
權(quán)值系數(shù)應(yīng)滿足

權(quán)值系數(shù)因子為d=[(1-r)/(1-rn-2)],其中r為遺忘因子,根據(jù)經(jīng)驗(yàn)通常取0.95~0.99。
這樣可以得到滑動(dòng)窗內(nèi)所有權(quán)值系數(shù)計(jì)算公式

通過(guò)權(quán)值系數(shù)可以估計(jì)出“正確”新息替代野值新息

這樣通過(guò)指數(shù)加權(quán)就可以消除量測(cè)值野值對(duì)濾波效果影響。與傳統(tǒng)的直接對(duì)量測(cè)值野值進(jìn)行剔除的方法相比,該方法不影響濾波的量測(cè)更新,避免了濾波由于缺少量測(cè)更新造成的估計(jì)精度急劇下降甚至發(fā)散的情況。野值識(shí)別與處理的示意圖如圖2 所示。
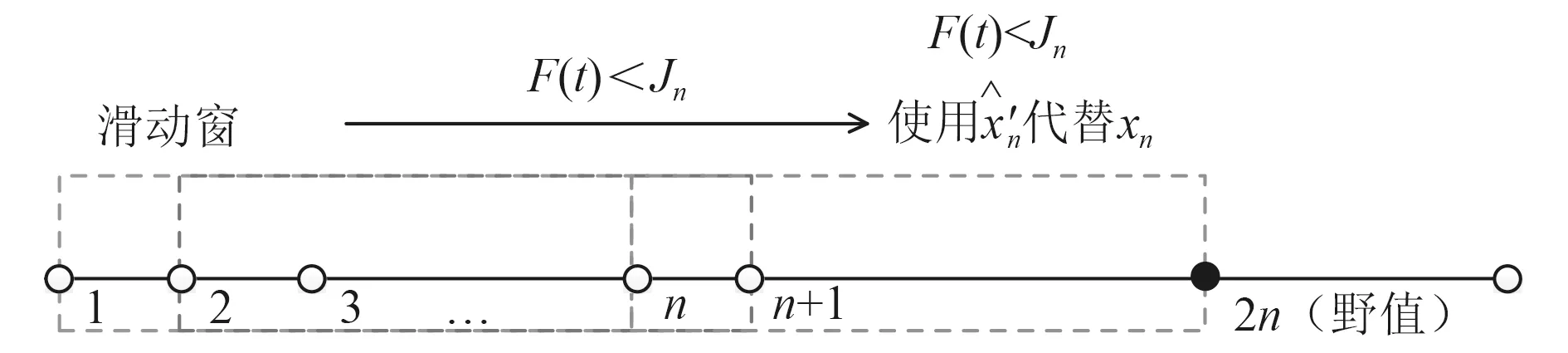
圖2 野值識(shí)別與處理方法示意圖Fig.2 Identification and processing of outliers
1.3 SVM-UKF 算法
式中,xk表示k時(shí)刻的狀態(tài)量,yk表示k時(shí)刻的量測(cè)量,wk-1~N(0,QK-1)為 系統(tǒng)噪聲,rk-1~N(0,RK-1)為量測(cè)噪聲,f(·)表 示捷聯(lián)慣導(dǎo)基本方程,h(·)為量測(cè)模型,對(duì)h(·) 進(jìn)行離散化處理可以得到H(·)。
SVM-UKF 算法流程如下:
1)時(shí)間更新
使用UT 變化構(gòu)造sigma 點(diǎn)χk-1(i)=sigma(,Pk-1),
通過(guò)系統(tǒng)模型更新得到 χk/k-1(i),
狀態(tài)預(yù)測(cè)均值與協(xié)方差為:
2)量測(cè)更新
計(jì)算新息并代入滑動(dòng)窗:

若新息為野值,使用指數(shù)加權(quán)計(jì)算替代值后代入量測(cè)更新:

若新息為正常值,直接進(jìn)入量測(cè)更新:
2 實(shí)驗(yàn)及分析
通過(guò)實(shí)驗(yàn)對(duì)所研究的SVM-UKF 方法估計(jì)效果進(jìn)行評(píng)價(jià)。實(shí)驗(yàn)采用位置作為量測(cè)量SINS/GPS 松組合方式。
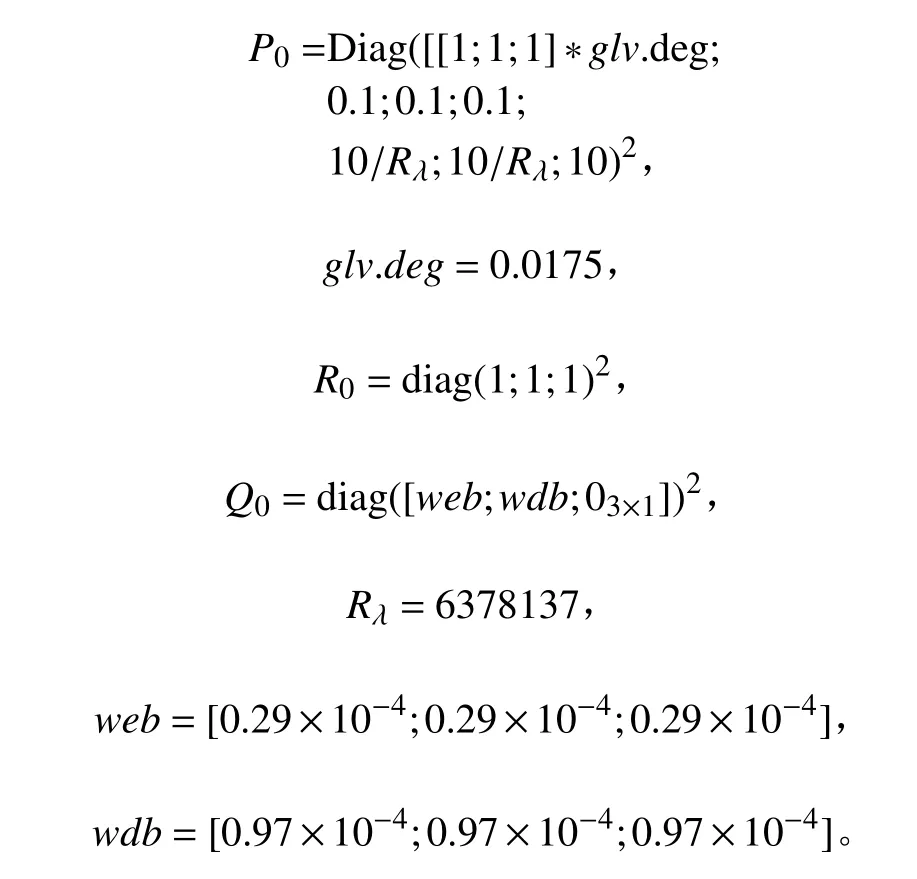
實(shí)驗(yàn)采用激光陀螺捷聯(lián)慣導(dǎo)與GPS 組合實(shí)驗(yàn)數(shù)據(jù)來(lái)比較3 種算法的估計(jì)效果。該實(shí)驗(yàn)中采用激光捷聯(lián)慣導(dǎo)系統(tǒng)的輸出數(shù)據(jù),激光陀螺漂移約為0.01°/h,加速度計(jì)零偏約為5×10-5g。慣導(dǎo)IMU 更新率為200 Hz,GPS 接收機(jī)更新率為1 Hz,水平速度誤差小于0.1 m/s,位置誤差小于2 m。
初始速度姿態(tài)位置由激光捷聯(lián)慣導(dǎo)提供。
實(shí)驗(yàn)過(guò)程共10 000 s,本文選取5 800~6 700 s 的900 s 數(shù)據(jù)進(jìn)行研究,該段中航行軌跡見圖3,五角星表示船的初始位置,圓點(diǎn)表示船的末端位置。在GPS輸出中每隔60 s 加入800 m 的位置誤差模擬GPS 出現(xiàn)野值,以未加入野值的SINS/GPS 組合導(dǎo)航系統(tǒng)的結(jié)果作為參考基準(zhǔn),由于航海更關(guān)注位置與航向,因此給出組合導(dǎo)航的位置與航向估計(jì)效果如圖4~圖6 所示。
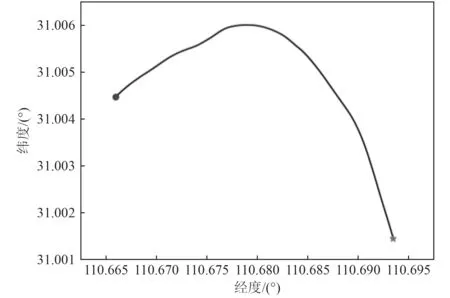
圖3 實(shí)驗(yàn)船行軌跡圖Fig.3 Trajectory map of river trial
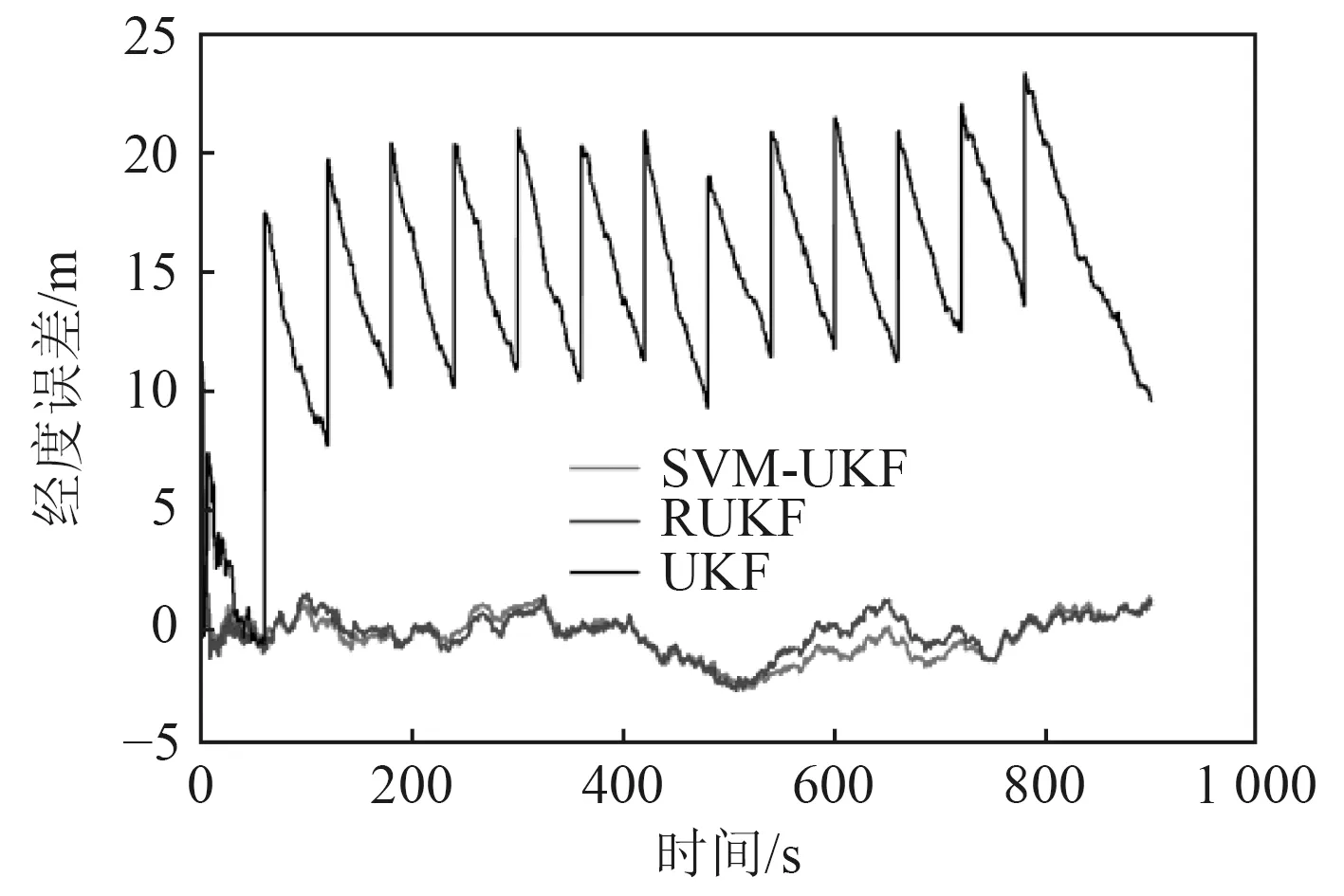
圖4 3 種濾波方法的經(jīng)度估計(jì)誤差Fig.4 Longitude estimation error of three filters
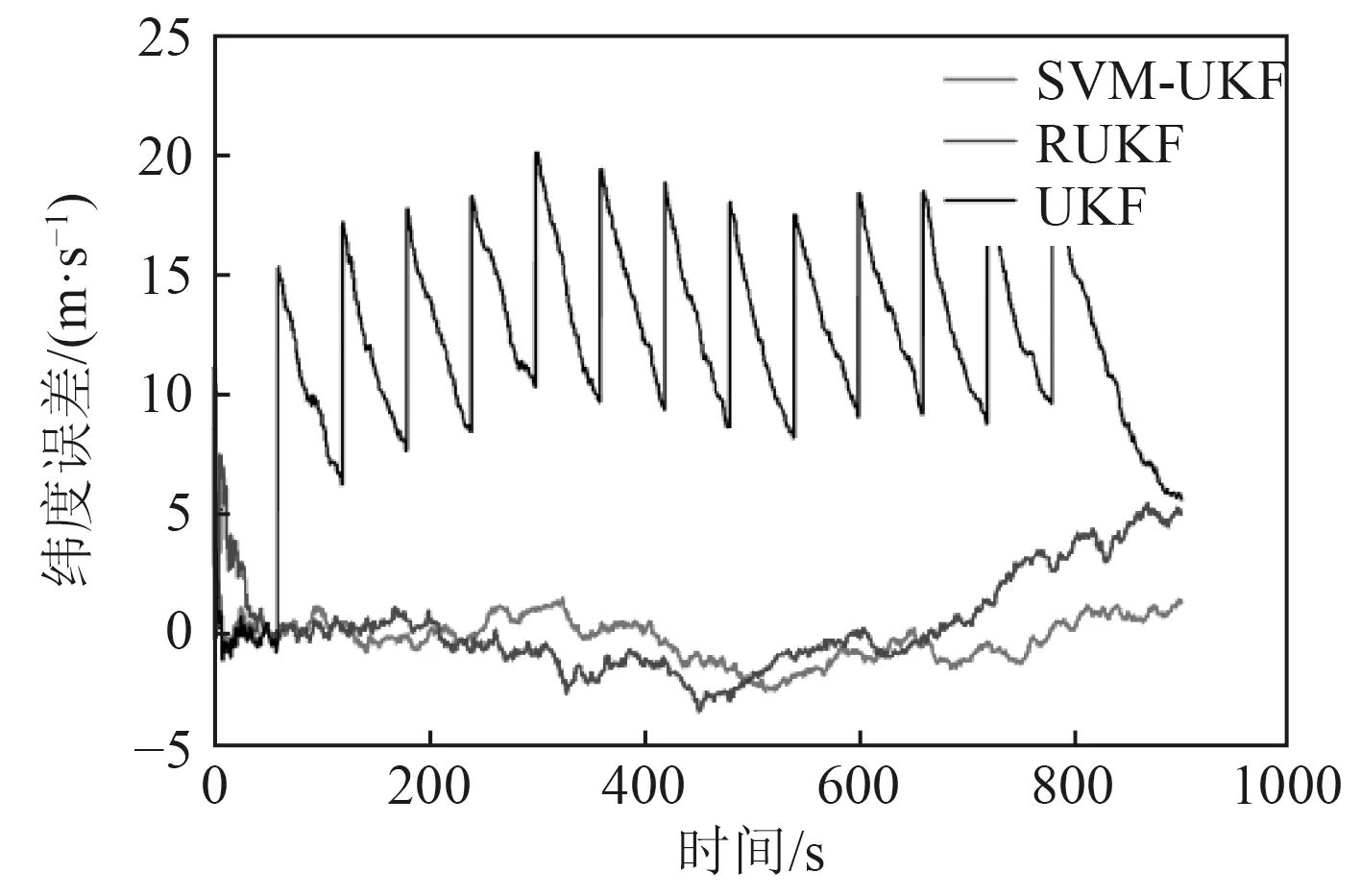
圖5 3 種濾波方法的緯度估計(jì)誤差Fig.5 Latitude eestimation error of three filters
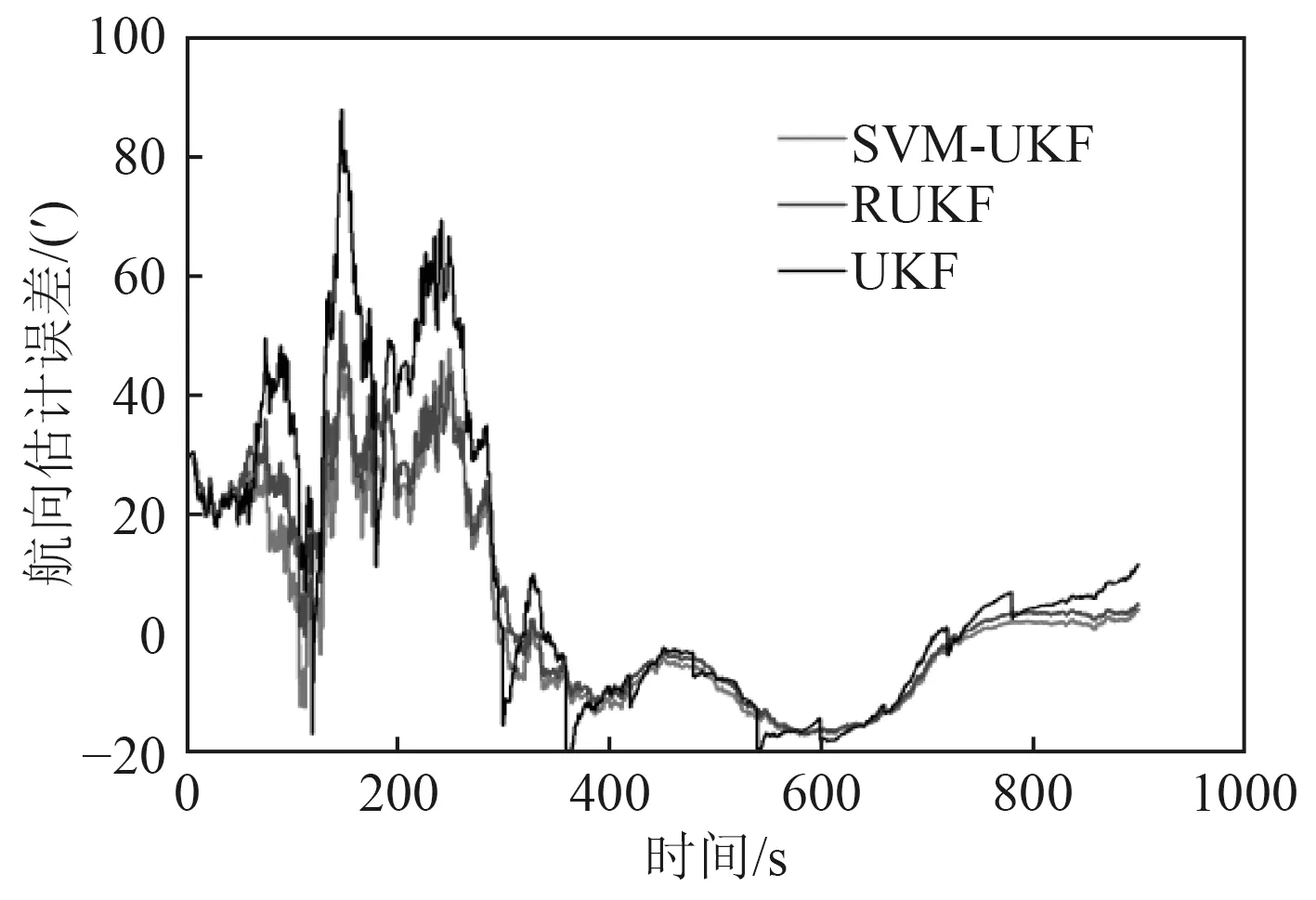
圖6 3 種濾波方法的航向估計(jì)誤差Fig.6 Yaw estimation error of three filters
圖4 與圖5 表示了位置的估計(jì)結(jié)果,可以看到UKF受到野值的干擾已經(jīng)發(fā)散,RUKF 與SVM-UKF 則表現(xiàn)出較好的估計(jì)效果。表1 給出了不同算法的位置、航向、東向、北向速度的RMSE 統(tǒng)計(jì)數(shù)據(jù)結(jié)果。由表1可以看出,RUKF 方法的位置誤差為4.968 m,航向誤差5.43′,北向速度估計(jì)誤差0.08/s,東向速度估計(jì)誤差0.07 m/s,SVM-UKF 方法的更好,位置誤差和航向誤差分別為2.474 m 和3.34′,北向、東向速度估計(jì)誤差為0.04 m/s 與0.06 m/s。
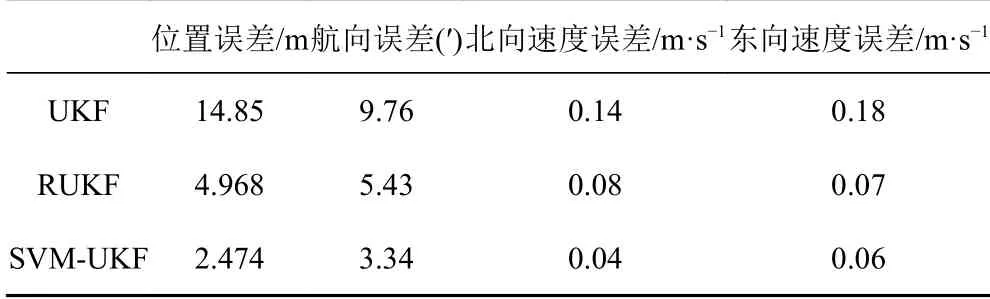
表1 位置估計(jì)誤差均方根誤差Tab.1 RMSE of position and yaw error
根據(jù)實(shí)驗(yàn)結(jié)果,可以得出結(jié)論。在位置估計(jì)中,雖然RUKF 有一定的魯棒性,但野值以及魯棒算法還是影響了濾波器的估計(jì)精度,SVM-UKF 的估計(jì)效果比RUKF 提高50.2%。分析航向的估計(jì)結(jié)果可以發(fā)現(xiàn),RUKF 雖然具有一定的魯棒性,由于受到野值的干擾,SVM-UKF 的估計(jì)效比RUKF 提高38%。在速度估計(jì)方面,北向速度的估計(jì)精度SVM-UKF 比RUKF提高了50%,東向速度的估計(jì)精度SVM-UKF 比RUKF 提高了14.2%。
3 結(jié) 語(yǔ)
捷聯(lián)慣性基組合導(dǎo)航中,量測(cè)值存在野值的情況時(shí)有發(fā)生,這個(gè)問(wèn)題都會(huì)導(dǎo)致UKF 的估計(jì)精度下降。針對(duì)這些問(wèn)題,本文提出了一種基SVM-UKF 算法。通過(guò)使用一類支持向量機(jī)訓(xùn)練滑動(dòng)窗,按照新息是否為進(jìn)行分類,對(duì)于異常的新息采用指數(shù)加權(quán)的方法進(jìn)行估計(jì),使用新的估計(jì)值替換野值。進(jìn)行了船載實(shí)驗(yàn)對(duì)SINS/GPS 系統(tǒng)進(jìn)行算法的性能檢驗(yàn)。通過(guò)與UKF,RUKF 相比較,證明了算法的有效性,得到結(jié)果:在實(shí)驗(yàn)中,SVM-UKF 對(duì)比于RUKF,位置估計(jì)精度、航向估計(jì)精度分別提高了50.2%與38%,北向、東向速度對(duì)比于RUKF 分別位置估計(jì)精度,航向估計(jì)精度提高了50%與14.2%。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
