
多局部節點異步抗差航跡關聯算法
2021-07-07 11:34:26衣曉杜金鵬張天舒
航空學報 2021年6期
關鍵詞:關聯
衣曉,杜金鵬,張天舒
海軍航空大學,煙臺 264001
在分布式多傳感器信息融合系統[1]中,多局部節點情況下的航跡關聯[2]問題一直是重要的研究內容。由于觀測區域不完全重合,各局部節點獲取的航跡數目不同,上報目標不完全一致的現象時常發生;且多局部節點航跡關聯受航跡異步[3-4]與系統誤差的影響更為明顯。
針對航跡異步問題,文獻[5]提出一種以最小二乘法為基礎的變異蟻群算法;文獻[6]利用順序成對關聯思想,將關聯問題轉化為廣義似然比檢驗;文獻[7]通過把局部航跡描述為集合,引入最優次模式分配(OSPA)距離進行關聯。傳統算法均是利用時域配準[8]解決異步航跡關聯問題,但由于多局部節點數目較多,時域配準的處理方法會導致運算量迅速增加,且時間同步過程中的誤差累積會大大降低關聯效果。加之系統誤差的存在使得航跡關聯問題與誤差配準[9-10]問題互為前提,上述算法的性能[11]將會大幅下降。
為克服系統誤差的影響,文獻[12]將航跡序列灰化,用灰色區域覆蓋系統誤差,利用區間數的相離度進行關聯;文獻[13]利用高斯隨機矢量的統計特征,提出順序成對關聯思想的關聯算法;文獻[14]則利用真實狀態對消得到等價量測方程,進行分級聚類。通過將系統誤差轉化為旋轉量和平移量,文獻[15-16]分別提出一種基于Fourier變換和Radon變換的航跡對準關聯技術。考慮到系統誤差主要影響目標的絕對位置而非相對位置,文獻[17]利用目標拓撲結構的空間不變性,根據鄰近目標間平均拓撲距離進行關聯;文獻[18]分析了虛警漏報導致的拓撲結構成員個數不一致的問題,并給出了初步的判別方法;文獻[19]通過拓撲特征與最佳子模式分配度量距離相結合,進一步提高了算法性能;文獻[20]則利用非剛性變換描述航跡間的結構差異,建立混合整數非線性規劃模型進行航跡關聯。
針對多局部節點航跡關聯問題,文獻[21]以灰關聯度作為全局統計量構造多維灰色關聯度矩陣,利用多維分配進行航跡關聯。考慮到新目標增加的情況,文獻[22]通過對測量集合和航跡集合合并,將多維分配的靜態結果擴展為動態多維分配,提高了算法的穩定性。通過將模糊集理論[23]應用于數據關聯,文獻[24]提出了多傳感器模糊數據融合模型和準則,利用數據關聯的靜態部分得出量測組合序列和多維分配最優解,利用動態部分估計目標實時狀態,文獻[25]則提出一種基于模糊遺傳算法的多傳感器數據關聯方法。
傳統算法對航跡異步、系統誤差、多局部節點航跡關聯等問題提出了不同解決方案,但各算法側重點單一,且多局部節點觀測區域不同導致的上報航跡集合不完全一致的問題未得到有效解決。
為解決航跡異步與系統誤差并存且上報航跡不完全一致情況下的多局部節點航跡關聯問題,本文提出一種基于區間離散度的多局部節點航跡關聯算法。針對航跡異步問題,定義不依托時間變量的離散度指標,實現異步航跡的直接關聯;針對系統誤差的存在,提出區間化方法,通過概率密度函數的累次積分表征系統誤差的不確定性;針對上報航跡不完全一致問題,設置零號航跡參與多維分配,實現全部航跡的有效關聯。通過實驗驗證,算法可在航跡異步與系統誤差并存的情況下實現多局部節點航跡的準確關聯,有效解決上報航跡不完全一致的問題。且不同于傳統算法性能受目標密集程度影響的特點,局部節點或目標數目的增加會提高本文算法的正確關聯率。
1 航跡關聯判別量的確立
1.1 航跡關聯原理分析

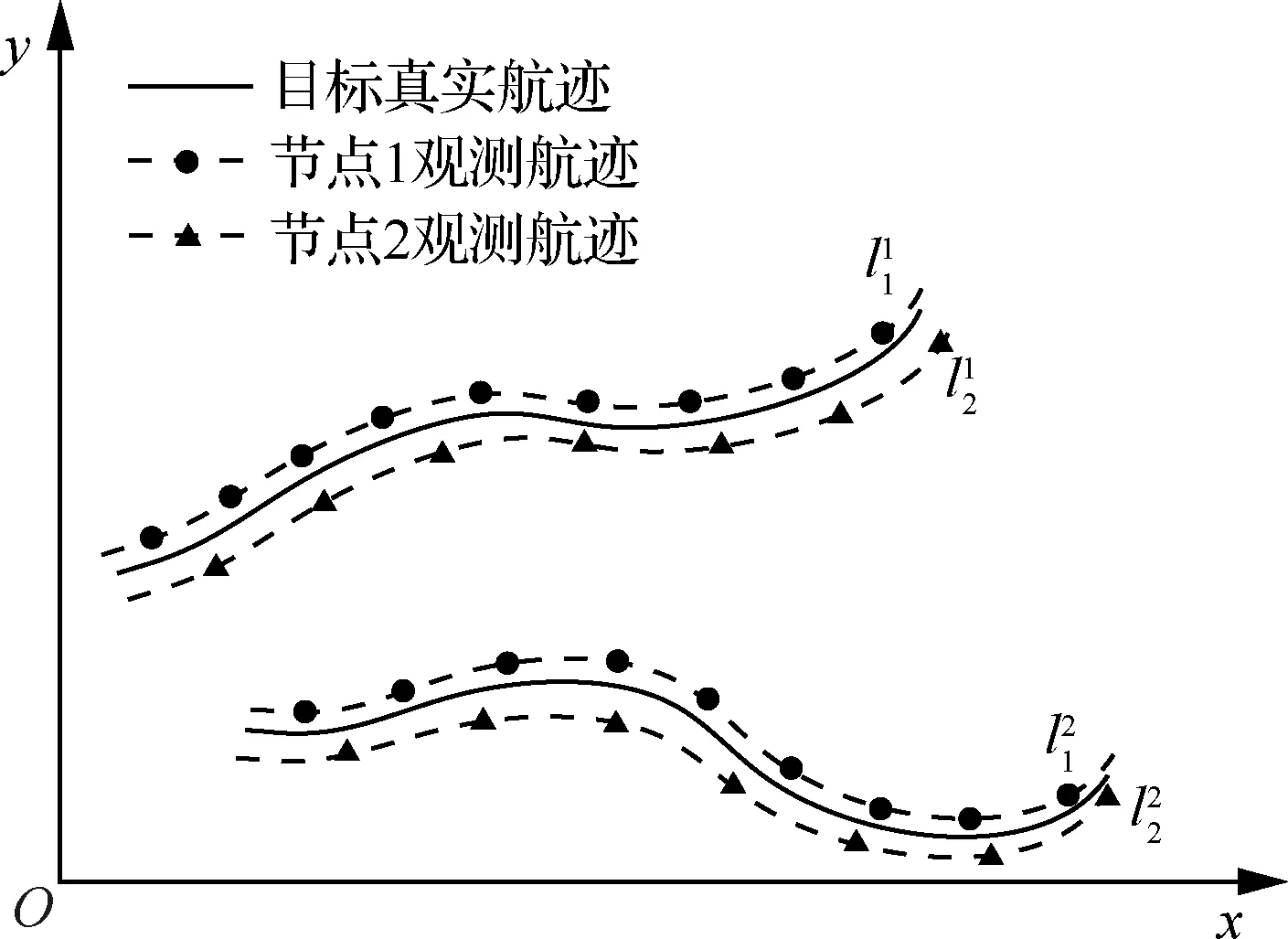
圖1 航跡關聯原理示意圖
直觀上看空間距離接近的航跡為同源航跡。對航跡間空間距離定義形式的不同導致關聯算法多樣,但均要求序列長度相等且各數據點觀測時刻一致,因此傳統算法對異步航跡關聯必須進行時域配準處理。
1.2 空間位置與離散度
航跡序列反映到空間坐標系中的具體形式是坐標數值,同源航跡序列中的數據點是不同節點對同一目標觀測而來,則從坐標數值角度而言,數據較為集中,離散度相對較小。
數學中離散隨機變量的離散度定義[26]為:設變量ξ取值離散,其取值集合記為ξ={x1,x2,…,xn},則離散度為
(1)
從數學表達式中不難發現,離散度求解過程中的均值等價于“空間位置中心”,方差實為各離散點到“空間位置中心”距離的平方和,故離散度反應的離散點到位置中心總的偏離程度與距離受空間位置影響產生的變化具有一致性,空間距離越近,離散度越小。
以二維空間中連續變化的5組隨機等長數列為例,如表1所示,其中,參考數列標號為1~4,比較數列標號為5,分別計算參考數列與比較數列的歐式距離di5與離散度Vi5,結果見表2。
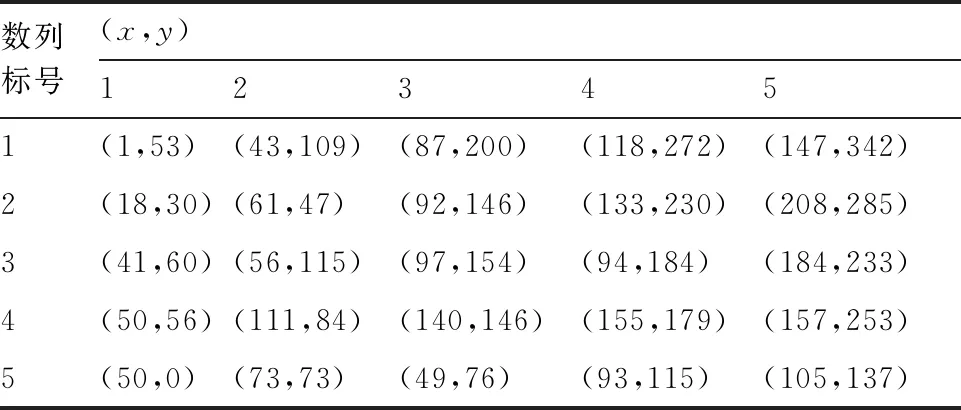
表1 隨機數列數據

表2 數列距離與離散度
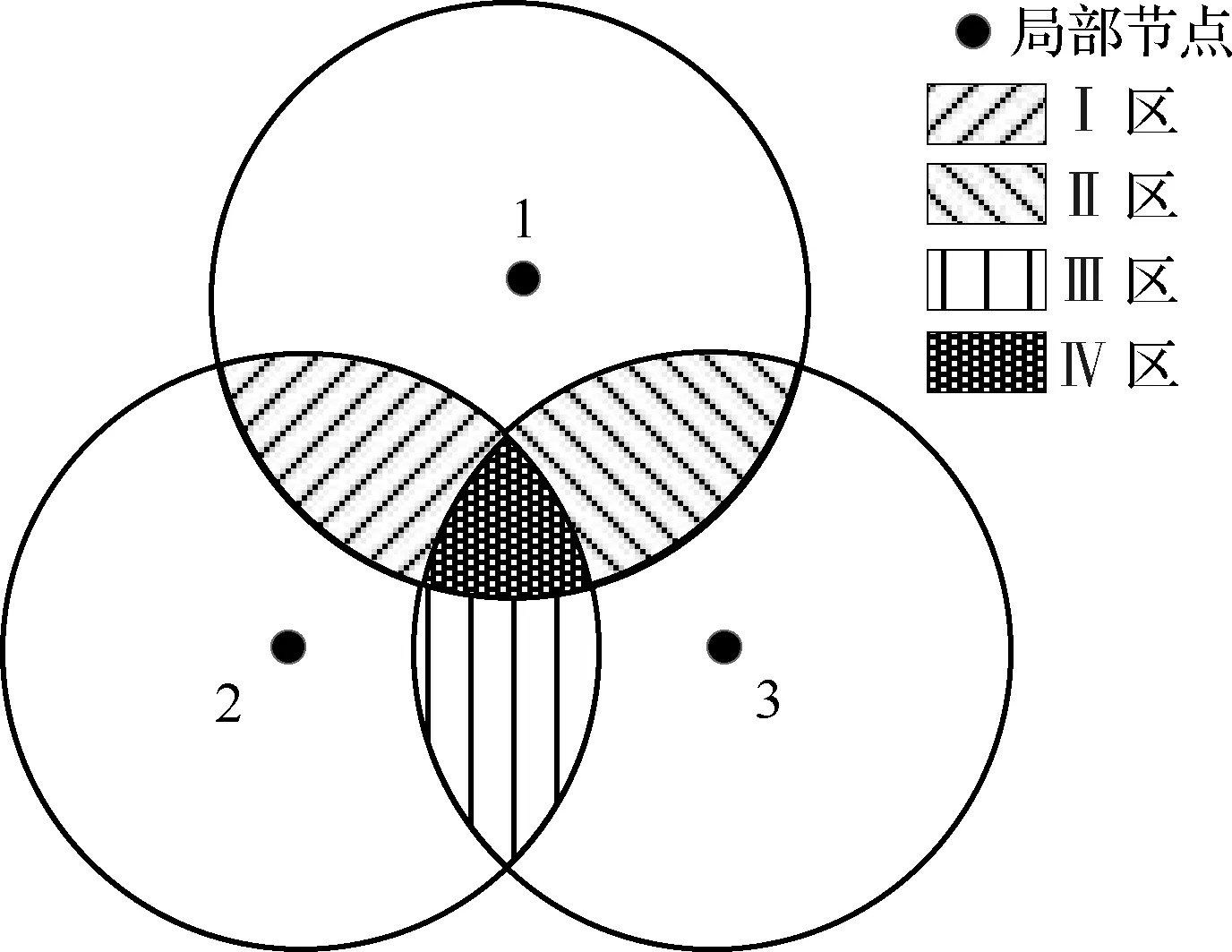
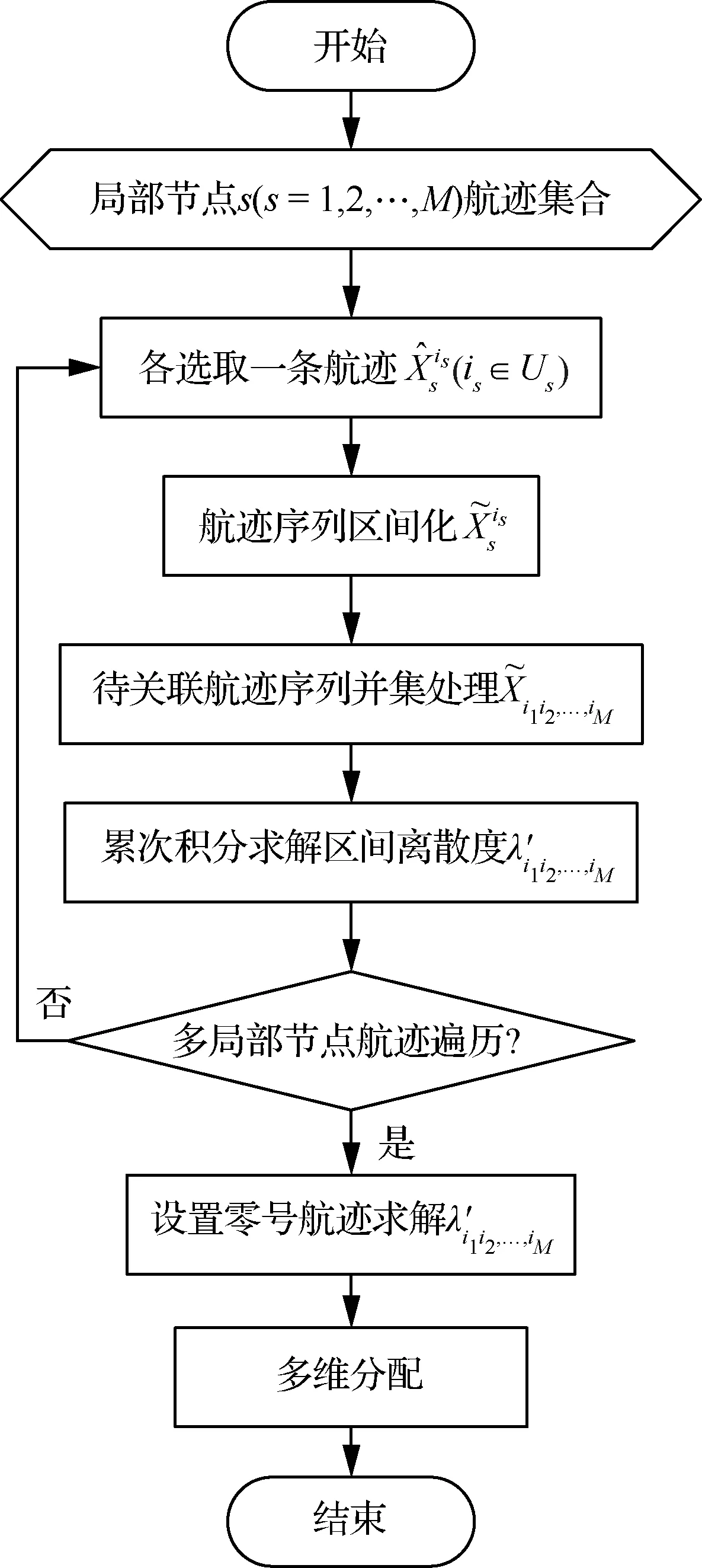
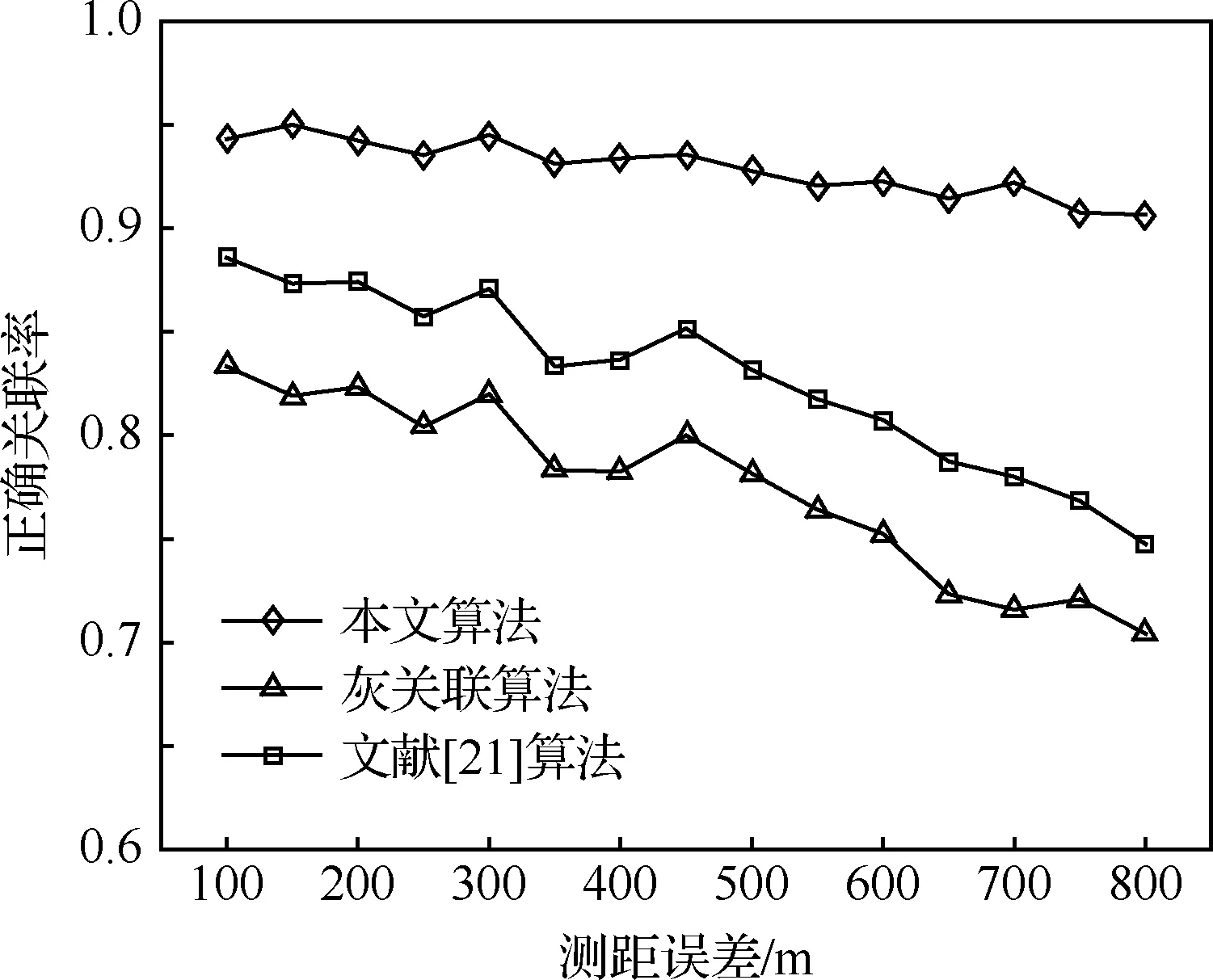
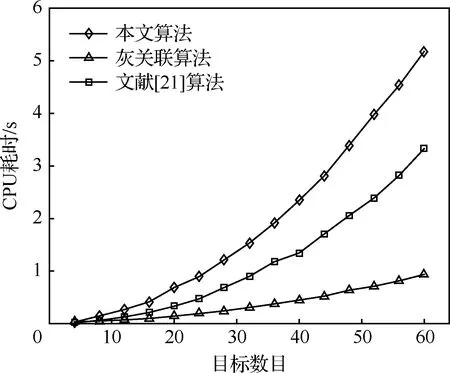
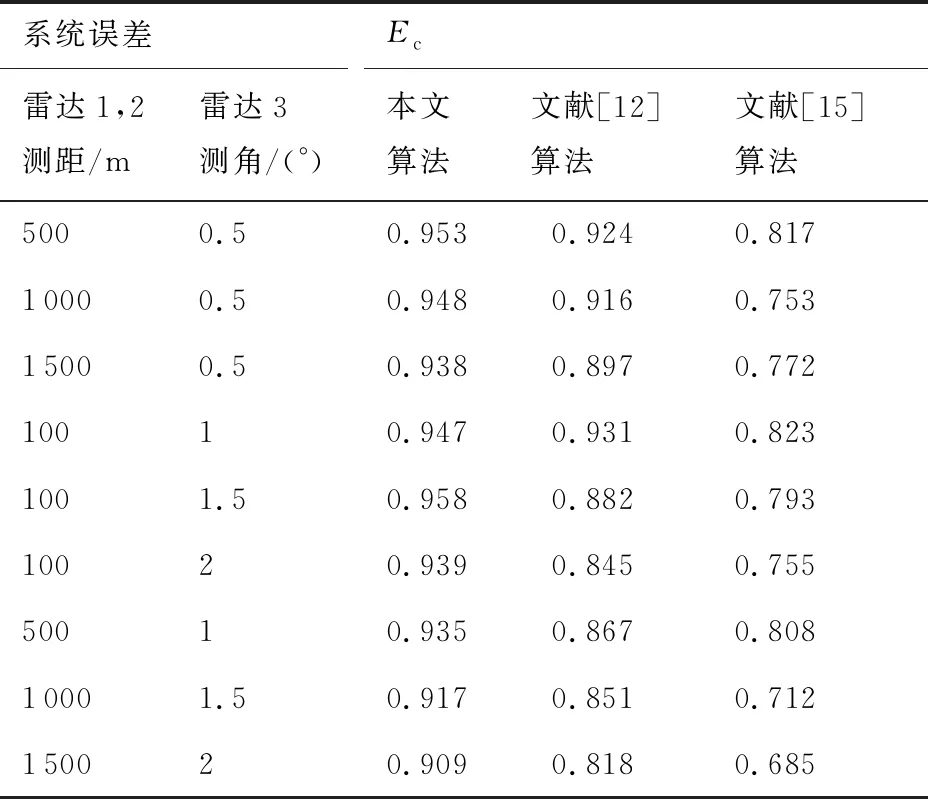
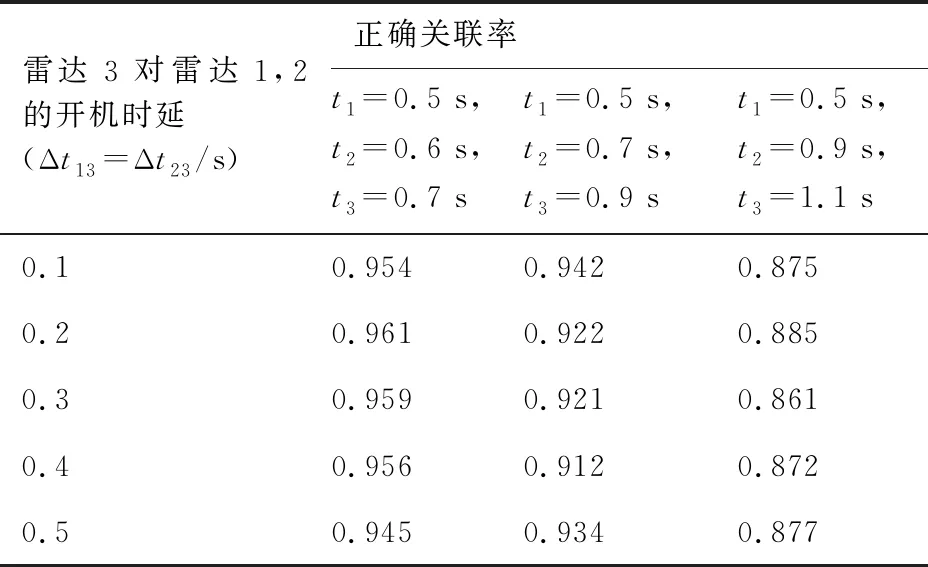
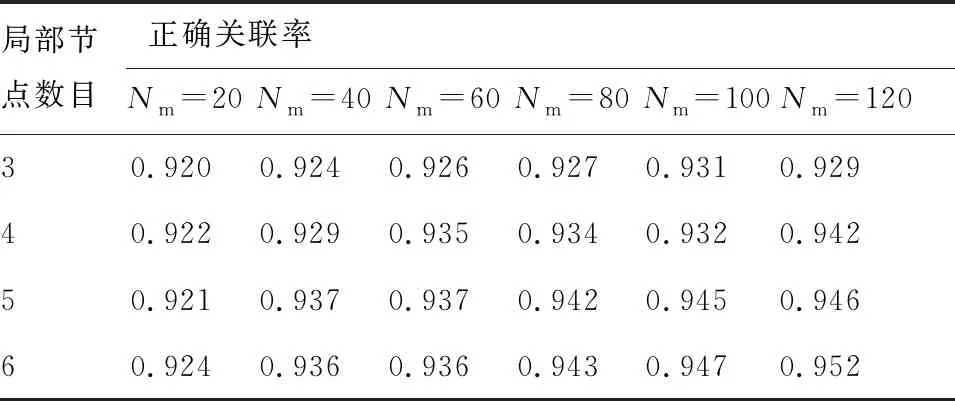
根據表2計算結果,有:d35 對含有未知系統誤差的航跡做區間化處理,處理后的航跡序列各元素為取值連續的區間數,對集合元素離散、各元素為取值連續的區間數的數據集定義區間離散度如下。 (2) 區間方差為 (3) 區間離散度為 (4) 式中: 假設由M(M≥3)個局部節點對多個目標進行跟蹤,所有局部節點不僅存在公共觀測區域,也可能存在獨立觀測區域。圖2表示了M=3情況下的觀測區域示意圖。 圖2 觀測區域示意圖 圖中Ⅰ、Ⅱ、Ⅲ區為兩個局部節點的公共觀測區域,Ⅳ區為3個局部節點的公共觀測區域,空白區為各局部節點的獨立觀測區域。 在進行多局部節點航跡關聯時,采用傳統多維分配法構造的全局統計量只對Ⅳ區航跡進行關聯,對Ⅰ、Ⅱ、Ⅲ區航跡未處理,出現“航跡遺漏”現象。 而傳統的兩兩關聯算法利用等價關系的可傳遞性依次進行兩兩關聯檢測。以局部節點1、2的航跡先進行關聯,局部節點2、3的航跡再進行關聯為例,關聯結束后,Ⅰ、Ⅲ、Ⅳ區的航跡被成功關聯,但Ⅱ區的航跡未被關聯,出現“航跡遺漏”現象。 上述“航跡遺漏”現象實際是由各局部節點觀測區域不同,上報航跡集合不完全一致導致的;且此現象會隨局部節點數目的增加而加重。故多局部節點上報航跡不一致情況下的航跡關聯問題需作單獨處理。 假設M個異地配置的局部節點位于公共笛卡爾坐標系中,坐標記為(xs,ys),s=1,2,…,M,各局部節點所得航跡標號集合為 U1={1,2,…,n1},…,UM={1,2,…,nM} (5) 所得航跡序列包含距離估計和方位角估計。根據系統誤差對距離和方位角估計進行區間化處理,對所得混合區間型數據集計算區間離散度,記為λi1i2…iM。 由于離散度[27]表征數據的離散程度,λi1i2…iM越小說明航跡i1,i2,…,iM為同源航跡的可能性越大,故利用多維分配法構建目標函數,即可求解航跡關聯最優解。 在二維平面坐標下某目標的真實距離和方位角分別為ρ、θ,考慮到局部節點受到緩慢變化的系統偏差的影響,根據局部節點可能的系統誤差最大值,在給定系統誤差偏差范圍內研究航跡真值分布的特點。假設局部節點的系統誤差大于0,記測距和測角系統誤差最大值為Δρm、Δθm,則在k時刻的量測值為 (6) 式中:Δρ、Δθ、υρ、υθ為局部節點在距離和方位角上的系統誤差和隨機量測誤差。 不考慮隨機量測誤差的影響,則目標真值為 (7) 圖3 系統誤差示意圖 考慮到單次量測的隨機性,目標落于區域G內各點處的概率不同,設目標距離隨機變量和方位角隨機變量服從高斯分布,根據3σ原則,可得目標二維極坐標服從的分布函數為 (8) 根據系統誤差對航跡序列區間化得到區間序列 距離和方位角量測值在各區間服從的概率密度函數記為 (9) 由于極坐標與直角坐標存在如下關系 (10) 以x分量為例,根據區間離散度定義可知直角坐標系下區間離散度為累次積分形式,得區間均值為 (11) 區間方差為 (12) 由于距離和方位角測量相互獨立,式(11)和式(12)中fk(ρ,θ)為聯合概率密度函數,有 fk(ρ,θ)=fk(ρ)·fk(θ)= (13) 當局部節點可獲取三維信息(距離、方位角、俯仰角)時,根據三維坐標轉換公式和量測獨立性,其區間均值、區間方差、聯合概率密度函數的計算方式類似。 以二維情況為例,設T為融合中心的處理周期,在第k個處理周期[(k-1)T,kT]內,從M個局部節點中各取一條待關聯航跡序列 (14) 式中: 零號航跡設置規則: 1)M個局部節點均設置一條零號航跡,標號為0。 3) 包含零號航跡的航跡組合的區間離散度取值單獨定義。 (15) 式中:δ為任意取值的極小量。 其余包含k(k=1,2,…,M-1)條零號航跡的航跡組合的區間離散度取值與式(15)類似。 定義二進制變量 (16) 于是,多局部節點航跡關聯問題轉化為全體航跡的多維分配問題,即 (17) 其約束條件為 (18) 對第s個局部節點中任意取定的航跡is而言,航跡組合多樣,但式(18)約束各種組合對應的二進制變量求和為1,根據式(16)定義可知僅同源航跡組合二進制變量取值為1,故約束條件可有效保證同源航跡組合判定結果的唯一性。 此類多維分配問題的求解,可用松弛算法等經典解決方法,此處不再贅述。 算法的流程如圖4所示。 圖4 算法流程圖 設在T=0 s時隨機產生60個目標,目標初始位置在區域[0,100] km×[0,100] km中均勻分布,目標運動模型采用二維平面勻速直線運動模型,且目標初始航向在0~2π rad內隨機分布,目標初始速度在300~500 m/s內隨機分布,目標持續運動時間為40 s。 為體現多局部節點觀測區域不完全重合的特點,設雷達無法觀測全部目標航跡,只能隨機觀測部分目標航跡,且雷達1、2、3觀測航跡數目分別占目標航跡總數的90%、80%、70%。 采用3種關聯率對航跡關聯結果進行評價,記正確關聯概率為Ec,錯誤關聯概率為Ee,漏關聯概率為Es。 仿真過程中,對于不支持多局部節點直接關聯的算法,采用兩局部節點的順序兩兩關聯檢驗;且將2.1節中描述的“遺漏航跡”視為漏關聯,相應“遺漏關聯概率”計入Es。 同時改變3部雷達測距的量測誤差標準差,研究3種算法正確關聯率的變化。 從圖5中可以看出,隨著測距隨機誤差的增大,3種算法的正確關聯率均下降,其中使用多維分配的本文算法和文獻[21]算法的正確關聯率高于順序兩兩關聯算法。這是由于多維分配尋求全局最優解,更適合多局部節點下的航跡關聯。由于文獻[21]利用灰關聯度構建多維矩陣,其算法變化趨勢與灰關聯算法相似。 圖5 關聯結果隨測距誤差的變化 改變3部雷達測角的量測誤差標準差,研究3種算法關聯率的變化,如表3所示。 表3 不同測角誤差下的關聯率 從表3中可以看出,本文算法的正確關聯率最高,且本文算法的漏關聯率明顯低于文獻[21]算法和灰關聯算法。對于多局部節點航跡關聯,由于上報航跡集合不完全一致,文獻[21]算法和灰關聯算法中均存在大量“遺漏航跡”未參與關聯。從表3結果來看,本文設置零號航跡參與多維分配的方法可有效抑制“航跡遺漏”現象,解決多局部節點上報航跡不一致的問題。 圖6給出了算法耗時的比較結果。以本文3個局部節點為例,傳統的順序兩兩關聯算法利用等價關系的傳遞性,只需順序進行兩輪航跡關聯,故耗時較低。而本文算法和文獻[21]算法使用多維分配方法,其求解復雜度隨著問題規模的增大呈指數增長,算法耗時普遍較高。由于本文算法計算過程涉及大量積分計算,且零號航跡的設置進一步增大了運算規模,故比一般的多維分配算法耗時更多。 圖6 算法耗時對比 改變仿真環境中雷達1、2的測距系統誤差和雷達3的測角系統誤差,比較算法的抗差性能。 表4中3種算法均無需事先校正雷達探測系統誤差,避免了傳統航跡關聯與誤差配準相矛盾的問題。從表4中可以看出,本文算法抗差性能最佳,文獻[15]算法受系統誤差的影響較大。 表4 不同系統誤差下的關聯率 算法[15]利用傅里葉變換估計補償航跡因系統誤差帶來的旋轉量和平移量,由于較大的系統誤差會在一定程度上導致航跡的略微變形,此時對旋轉平移量的估計誤差較大,故關聯性能有所下降。 圖7給出了3部雷達不同采樣率之比對算法的影響。可以看出,隨著采樣率之比的增加,3種算法的正確關聯率均下降,且文獻[5]和文獻[8]中算法下降趨勢較快。 文獻[5]和文獻[8]中算法是典型的通過時域配準對異步航跡進行關聯的算法。當采樣率之比逐漸增大時,時間同步過程中需要濾波插值的航跡點數目增加,使得濾波誤差迅速累積,影響算法關聯效果。 為研究本文算法對系統誤差下異步航跡直接關聯的有效性,在存在系統誤差的前提下,改變仿真環境中3部雷達的采樣周期與時延進行仿真驗證,如表5所示。 表5 不同采樣周期和開機時延的正確關聯率 從表5中可以看出,在存在系統誤差的前提下,雷達開機時延并未產生明顯影響。這是由于本文算法所用指標離散度不依托時間變量,一定范圍內的開機時延只造成數據點在時間上的錯位,并不影響數據分布的離散度,其中,t1、t1、t3為雷達1、2、3采樣周期。 由于離散度屬于統計學度量,其度量精度與數據點數目有關,采樣周期越長,數據量越少,對離散度的刻畫越不準確,故隨著采樣周期增大,算法正確關聯率有所下降。 改變仿真環境中目標航跡總數,研究目標密集程度對算法性能的影響。 從圖8中可以看出,在目標數目增多時,傳統灰關聯算法和文獻[21]算法的正確關聯率有所下降,而本文算法的正確關聯率反而上升。 圖8 不同目標數目的正確關聯率對比 表6給出了不同局部節點和目標數目Nm下本文算法的正確關聯率。 表6 不同局部節點和目標數目下的正確關聯率 從表6中可以看出,本文算法在局部節點和目標數目增加時,正確關聯率有所提高。從數理統計原理來看,利用離散度表征集合中數據的分散程度時,一定程度上航跡數目的增加會增大混合區間數據集的樣本量,進而提高離散度對同源航跡數據集合中非同源航跡數據的分辨精度,有利于算法性能的提升。 1) 提出一種基于區間序列離散度的多局部節點異步抗差航跡關聯算法,定義區間型數據集離散度的具體度量指標和航跡序列區間化的方法,并通過概率密度函數累次積分量化系統誤差的影響。 2) 算法無需時域配準,可對多局部節點下存在系統誤差的異步航跡直接進行準確關聯,且零號航跡的設置可有效解決多局部節點上報目標航跡不一致的問題。 3) 與傳統算法不同,本文算法的正確關聯率隨局部節點數目或目標數目的增加而提高。1.3 區間型數據集的離散度度量
2 基于區間離散度的航跡關聯算法
2.1 問題描述
2.2 系統誤差的區間化與累次積分

2.3 航跡關聯判定




3 仿真驗證與分析
3.1 仿真環境

3.2 算法性能比較與分析

3.3 系統誤差與航跡異步關聯有效性分析
3.4 局部節點數目與目標密集程度的影響

4 結 論
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42
