基于相控聚焦原理的懸浮微粒操控研究
2021-07-07 11:05:30馬熳倩孔令昊古豪天曾天佑曾育鋒
物理實驗 2021年6期
關鍵詞:信號
馬熳倩,孔令昊,古豪天,曾天佑,曾育鋒,b
(華南師范大學 a.物理與電信工程學院;b.物理國家級實驗教學示范中心,廣東 廣州 510006)
聲懸浮技術是材料無容器運輸以及處理的關鍵技術,在醫藥[1]、生物、材料[2]等多個領域都有廣泛應用. 聲懸浮研究的重點是懸浮物體在駐波聲場的操縱技術,主要包括懸浮目標的移動和懸浮穩定性[3-4]. 已有報道用超聲懸浮系統來操控物體在三維空間移動[5-6],其中超聲相控聚焦原理是提高聲場中物體可控性的方法之一.
本文采用凹球面雙發射極超聲陣列,形成懸浮能力較強的駐波聲場,結合相控聚焦原理,利用FPGA硬件系統控制相位,從操控懸浮微粒移動的準確度和可操控范圍2方面進行研究,實現微粒在三維空間中的穩定移動. 本文設計的裝置不僅可以實現穩定懸浮,還可以大范圍操控,實驗現象直觀且清晰.
將聲懸浮創新實驗引入教學中,不僅能激發學生的學習興趣和主動性,通過動手實踐加深學生對聲學理論的理解,還能促使學生探索關于聲場內物體移動運輸的應用,從而培養學生的創新意識.
1 實驗原理
1.1 駐波懸浮機理
超聲駐波是由2列振幅相同、頻率相同、沿相反方向傳播的超聲波疊加產生的,由此形成的聲能量空間分布一定的聲場稱為超聲駐波聲場. 駐波聲場由波腹和波節構成,且兩者的位置不隨時間發生變化. 波腹是聲壓幅值最大的點,波節是聲壓幅值為0的點.
為了單獨衡量聲場的懸浮能力,根據聲輻射時間平均勢理論[7],得到簡化后的相對時間平均勢公式[8]:
(1)

當聲場中各參量確定,若懸浮微粒密度很小,微粒將懸浮在相對時間平均勢極小值點的位置上. 此極小值點是對應聲壓為0的點,即為波節處. 當懸浮微粒由于重力的作用,相對波節位置有微小的偏移時,將會受到指向聲壓節點的回復力,使微粒回到原來的平衡位置. 若懸浮微粒的質量較大,懸浮位置將會在波節處向下偏移一段微小距離.
1.2 凹球面雙發射極超聲陣列結構設計
凹球面雙發射極超聲陣列是由雙凹球殼支架和超聲陣列組成,其中支架的中間與底部都設計了支撐柱,以保持裝置穩定,而超聲陣列是將一系列陣元(超聲換能器)以多個圓環形狀在球殼表面均勻排列而成,結構如圖1所示,該結構能夠實現自聚焦,并且懸浮能力強[3].

圖1 超聲陣列結構
一般情況下,凹球面陣列的陣元數量越多,聲輻射力就越大,聚焦性能也越好. 但在本實驗中,當陣元數量為72或100時,駐波聲場的聚焦性能和聲輻射力均能滿足需求[3],且操控微粒全三維移動時,需要對每個陣元進行單獨控制,陣元越多,FPGA資源占用越大,開發失敗的風險也將越大,因此最終選取陣元數量為72的凹球面超聲陣列進行實驗研究.在此基礎上,利用COMSOL 仿真模擬,在自聚焦的前提下,選取仿真效果符合實驗目的的其他裝置參量.
支架的上下球殼選取于同一球體(曲率半徑相同). 為了增大懸浮微粒三維移動的空間范圍,使實驗現象明顯,選取球體半徑為109.12 mm,陣列高度為180.07 mm.
每個球殼上設計了36個圓形凹槽(包括了引腳孔),用來放置超聲換能器陣元(其中心頻率為40 kHz),如圖2所示. 陣元以球殼中線為對稱線分布于兩側,以方便計算各聲源到聚焦點的距離. 其中,最里層、中間層和最外層相鄰2個陣元的幾何中心的間距分別為18.34 mm,18.81 mm和18.55 mm. 最里層與中間層在豎直方向的高度差為4.69 mm,最外層與中間層在豎直方向的高度差為7.77 mm.

(a)上球殼 (b)下球殼
當施加周期性變化的高頻電壓時,超聲換能器陣列將產生機械振動,進而產生超聲波. 雙發射極超聲陣列發出的超聲波,能在2陣列中間形成超聲駐波聲場.
1.3 超聲相控聚焦原理及陣元相位計算
超聲相控陣是由一系列超聲換能器陣元組成的陣列,對每個陣元施加獨立的激勵信號,使全部陣元發出的聲波聚焦于某一位置. 超聲相控聚焦原理是通過控制每個陣元聲源信號的初相位,調節各聲源之間的相位關系,使每個聲源發出的超聲波傳播到預設的聚焦點位置都處于同一相位,實現聲壓的疊加.
本文設計的超聲陣列結構上下2部分發出的超聲波符合駐波產生條件,聲場仿真結果如圖3所示. 從圖3中可以看出,在聚焦點附近形成超聲駐波聲場,使微粒懸浮于波節附近(其中白色部分表示聲壓幅值為0,即波節位置).
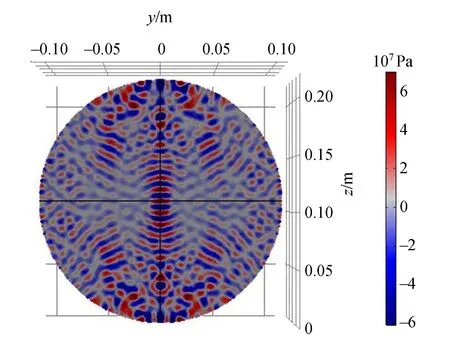
圖3 超聲駐波聚焦聲場仿真圖
陣元發射信號示意圖如圖4所示. 通過相位延時調節各聲源的相位關系,即在每個陣元的發射信號上加相應的延時量,使距離遠的聲源先發射信號,距離近的聲源后發射信號,從而使所有信號同時到達聚焦點.
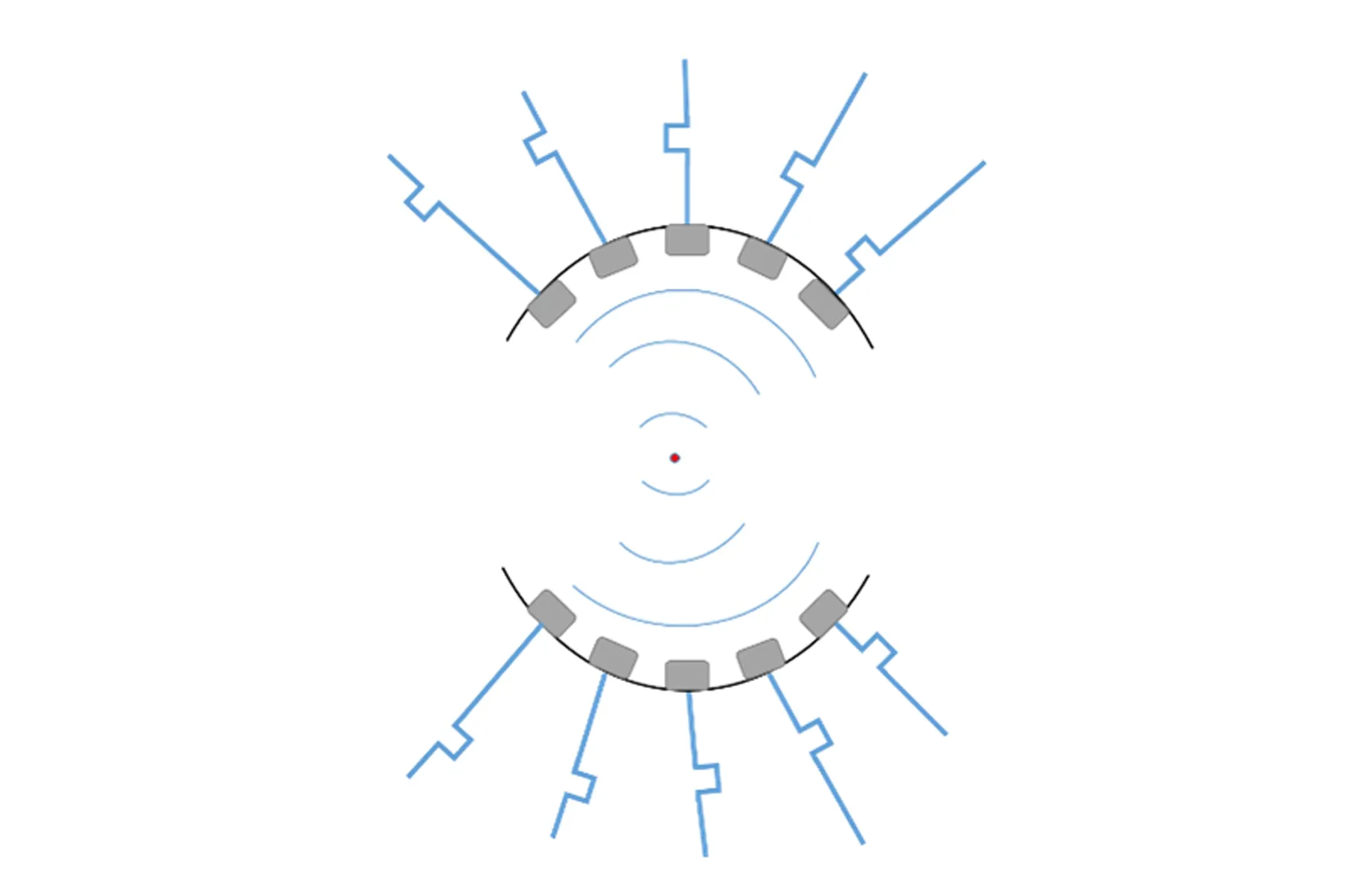
圖4 陣元發射信號示意圖
根據延時量可計算相位差[9]:
Δφ=2πf0Δt,
(2)
其中,f0為聲源信號的頻率,Δt為延時量.根據聚焦點與各陣元的位置關系,可以計算出相應的延時時間.
如圖5所示,對于凹球面超聲陣列,若凹球面的曲率半徑為R,將換能器底部圓形凹槽的中心坐標視為聲源發射點,取點P(x,y,z)討論.其中z為
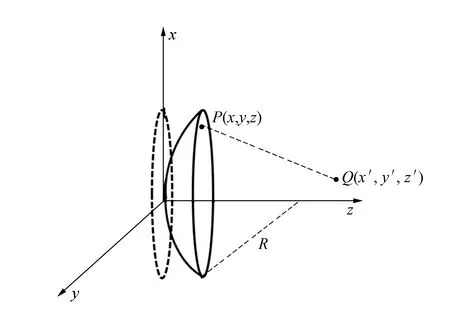
圖5 凹球面陣元與聚焦點的位置
(3)
若預設聚焦點坐標為Q(x′,y′,z′),則點聲源到聚焦點的距離為
(4)
可得到聲波到達聚焦點的時間為
(5)
當選定了基準聲源后,則可以計算出其余聲源相對于此聲源的延時量Δt,從而確定各陣元相對于基準聲源的相位差Δφ.
1.4 動態聚焦
根據相控聚焦原理,有規律地調節陣元信號的相位差,使預設的聚焦點按照設定的時間間隔移動到某一位置,實現超聲波束的動態聚焦. 在控制聚焦點移動的同時,聲場整體也在移動,進而帶動波節附近懸浮的微粒移動,從而實現操控聲場中懸浮微粒的移動.
通過JTAG(Joint test action group)將PC中的程序下載到FPGA開發板上. FPGA外接SDHC(Secure digital high capacity)作為存儲器. 將SD卡與電腦連接,在Matlab軟件中利用相控聚焦原理計算在指定某一聚焦點位置時,各陣元與基準聲源的相位差. 根據本裝置大小設置可懸浮區域為60 mm×60 mm×60 mm.為了保證懸浮微粒移動的平滑順暢,設置聚焦位置為201×201×201的空間點陣,且相鄰2個聚焦點位置間隔為0.3 mm,同時在SD卡中生成包含相位延時參量的bin文件.
FPGA根據搖桿模塊輸入的信號,通過SPI通信協議,按需求實時讀取72組信號的相位延時參量,即可實現各聲源相位的實時改變. 超聲波相位信號經放大電路(L298N模塊)放大后傳輸至超聲換能器輸出. 硬件系統各部分連接如圖6所示.
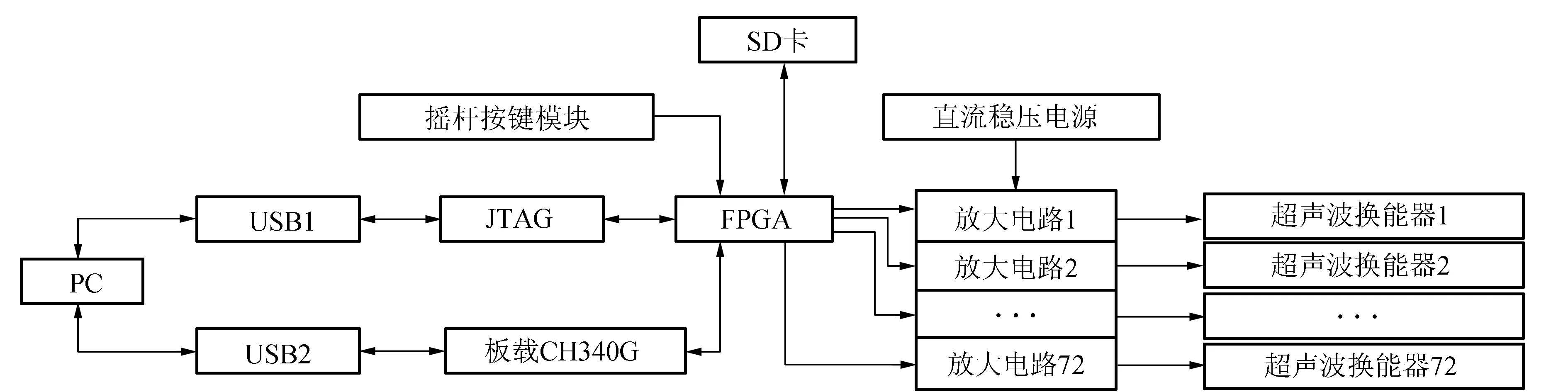
圖6 硬件系統各部分連接關系
1.5 檢測校驗
在實際情況中,信號的放大和傳輸過程會受到各種因素的干擾,最終導致換能器輸出的信號與預期設想不符. 因此要通過信號檢測,測試出錯誤信號并且予以糾正. 通過FPGA開發板上自帶的CH340G與FPGA串口通信,進行信號檢測和校驗. 再用示波器檢測L298N的輸出是否都為40 kHz方波信號. 然后檢測所有超聲波換能器是否都發出振幅相近的40 kHz超聲波. 正常情況下,示波器上將顯示穩定的正弦波. 此外,還可以通過示波器測試探頭,測試輸出相位是否和預設一致,如果出現偏差則調整探頭的位置,或者通過調節相位延時信號,實現相控準確聚焦[10].
2 實驗操控與結果
2.1 懸浮微粒的選取
根據懸浮原理,懸浮微粒的直徑不能超過半個波長,則在有限的半徑里,懸浮微粒的密度越低,其懸浮穩定性越好[10]. 并且從圖3中可以發現,聚焦點附近聲壓幅值為0的區域呈現凹球面的形狀,所以與圓球形相比,半球形的幾何形狀更吻合波節的形狀. 因此,半球形泡沫小球懸浮效果更為穩定,移動操控時不易掉落. 本文選取直徑為3 mm的半球形狀聚乙烯小球作為懸浮微粒,并且在實驗中驗證以上推斷.
2.2 操控懸浮微粒移動的準確度
在微粒穩定懸浮的基礎上,實現微粒在1維方向上移動,并選取2個方向進行移動軌跡誤差分析. 打開電源開關,將微粒放入雙凹球面超聲陣列裝置的中心,使其穩定懸浮,如圖7所示.

圖7 微粒懸浮圖
操縱遙桿,使微粒向下移動,移至邊界位置后,再操控微粒向上移動. 使用手機正面拍攝微粒上下往返移動的視頻,并且導入編寫的軌跡識別程序中,識別出微粒移動的軌跡,如圖8中藍色線所示. 程序已預設微粒移動的軌跡為紅色線(x=54),通過對比,可以分析實際軌跡和預設軌跡的誤差.
為了更準確地描述微粒移動的準確度,本文計算了均方根誤差和相對誤差.從圖8中可以看出,微粒移動的軌跡近似為直線.粒子在水平方向存在微小抖動,但抖動現象對整體移動的影響很小.計算均方根誤差為0.35 pixel,相對誤差為0.24%.
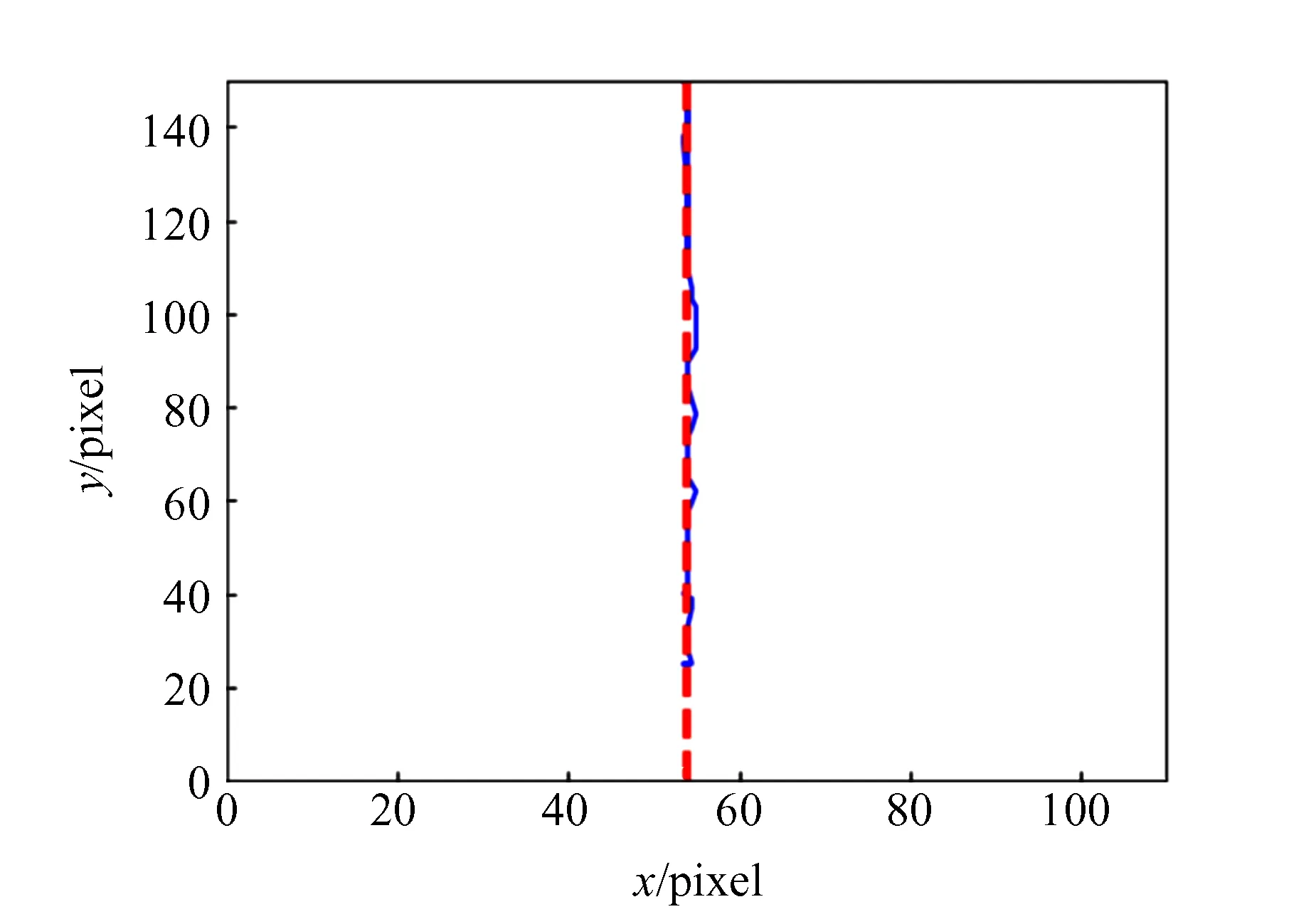
圖8 微粒上下移動軌跡圖
同樣操控微粒左右往返移動,同時拍攝視頻進行微粒移動的軌跡識別,如圖9中藍色線所示.程序已預設微粒左右移動的軌跡為紅色線(y=109).從圖9中可看出,微粒移動的軌跡近似直線,計算得到均方根誤差為1.18 pixel,相對誤差為0.67%.
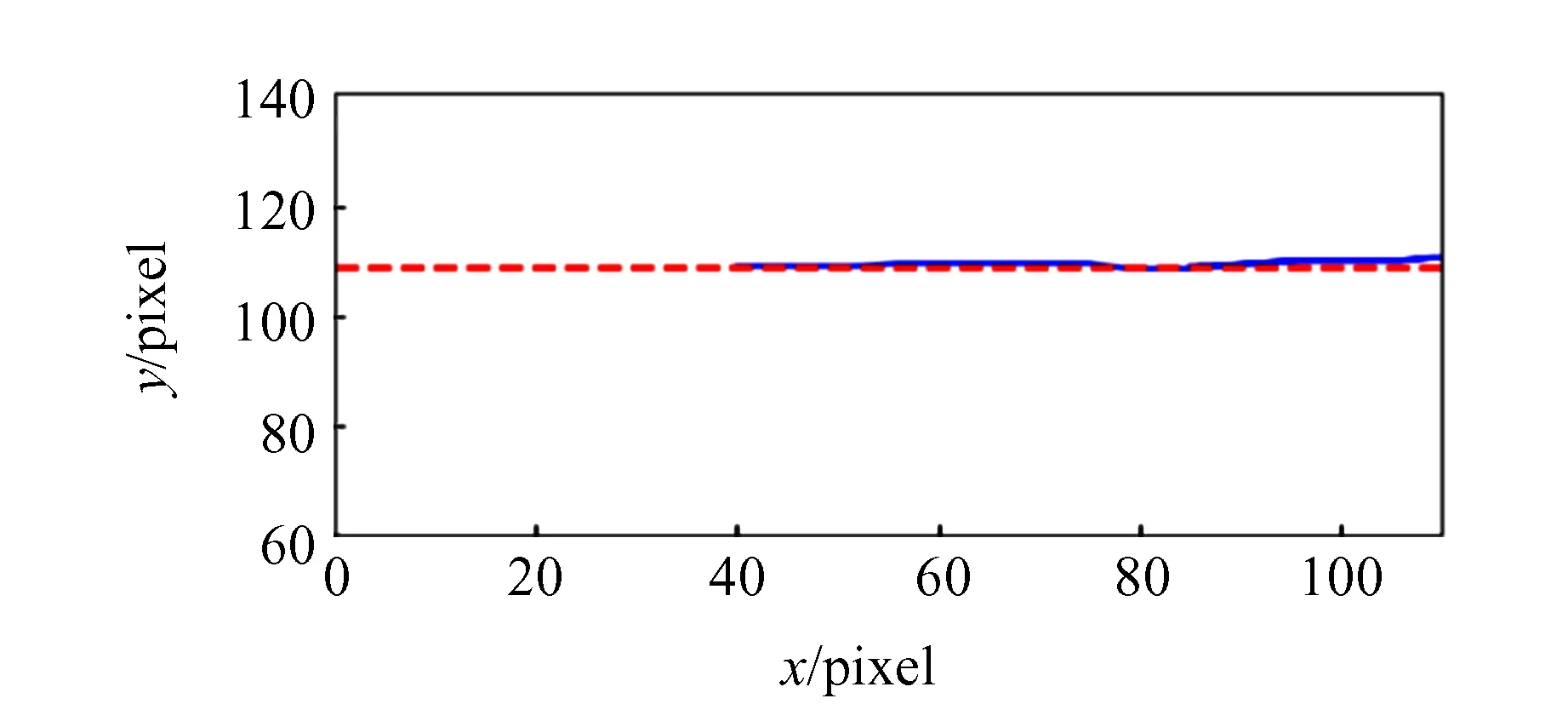
圖9 微粒左右移動軌跡圖
從以上分析中可看出,粒子實際移動軌跡與理論設定值吻合度較好,操控微粒移動的準確度較高.
2.3 可操控范圍
2.3.1 豎直平面
選取豎直平面上構成“S”圖形聚焦點的坐標,操縱遙桿,使FPGA按“S”的軌跡移動,且每隔0.029 s讀取1次相位,從而使微粒在2維豎直平面內走“S”軌跡. 拍攝視頻,通過軌跡識別程序,得到圖10. 可以看出實際移動軌跡與預設的“S”軌跡吻合,只存在輕微抖動,實現了懸浮微粒在2維平面內操控移動的效果.
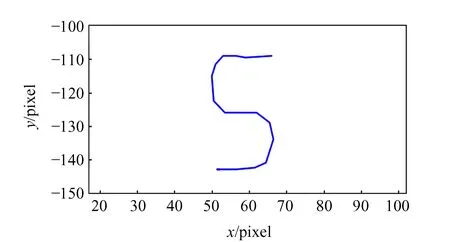
圖10 “S”移動軌跡圖
2.3.2 水平面
選取水平面上構成方形的聚焦點坐標,操縱遙桿,使FPGA按方形軌跡移動,且每隔0.029 s讀取1次相位,使微粒在2維水平面內按方形軌跡運動. 由于觀察時2維水平面干擾物過多,難以用程序識別軌跡,因此本文利用手機的流光快門拍攝出實際軌跡圖,如圖11所示,可以看出實際移動軌跡與預設的方形軌跡吻合.

圖11 方形移動軌跡圖
綜上所述,本文設計的凹球面雙發射極超聲懸浮裝置實現了懸浮微粒在3維空間中移動,可操控微粒移動的范圍廣.
3 結束語
本文設計的裝置可以使微粒穩定懸浮,大范圍操控移動,而且移動準確度高. 若將該裝置融入中學或大學物理教學中,為聲懸浮理論的研究及實驗探究提供實驗平臺,不僅能激發學生學習的興趣,通過動手實踐來加深學生對聲學理論的理解,還能培養學生的創新精神,使學生基于此條件探索出更多關于聲場內固體或者液體移動運輸的應用.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06