下肢外骨骼機器人驅動方式及發展前景
2021-07-17 10:43:22宋品清黃建昌
河南科技 2021年7期
宋品清 黃建昌
摘 要:近年來,下肢外骨骼機器人的應用越來越廣泛。研究者把下肢外骨骼機器人的驅動方式分為四類,即液壓驅動、氣壓驅動、電機驅動及人工肌肉驅動,并分別介紹了這四種方式的工作原理,闡述其優缺點,最后對其未來的發展趨勢進行展望。
關鍵詞:下肢外骨骼機器人;驅動方式;液壓驅動;氣壓驅動;電機驅動
中圖分類號:TP242文獻標識碼:A文章編號:1003-5168(2021)07-0006-03
Lower Limb Exoskeleton Robot Driving Mode and Development
Prospect Analysis
SONG Pinqing HUANG Jianchang
(Hebei Agricultural University,Cangzhou Hebei 061000)
Abstract: In recent years, lower limb exoskeleton robots are being used more and more widely. Researchers divided the driving modes of lower limb exoskeleton robot into four categories, namely hydraulic driving, pneumatic driving, motor driving and artificial muscle driving. The working principles of these four modes are introduced respectively, and their advantages and disadvantages were described. Finally, the future development trend was prospected.
Keywords: lower limb exoskeleton robot;driving mode;hydraulic driving;pneumatic driving;motor driving
近年來,下肢外骨骼機器人作為一種輔助設備被廣泛應用于各個行業,在軍事、醫療領域尤為常見。它是一種可穿戴的機械裝置,靈感來源于一些動物自身的外骨骼,結合動力學、仿生學等學科制造,在輔助運動及康復方面有著重要應用[1]。按照驅動方式,可將下肢外骨骼分為四類,即液壓驅動、氣壓驅動、電機驅動以及人工肌肉驅動[2]。本文對下肢外骨骼機器人的驅動方式進行了闡述。
1 下肢外骨骼機器人驅動方式的分類
1.1 液壓驅動
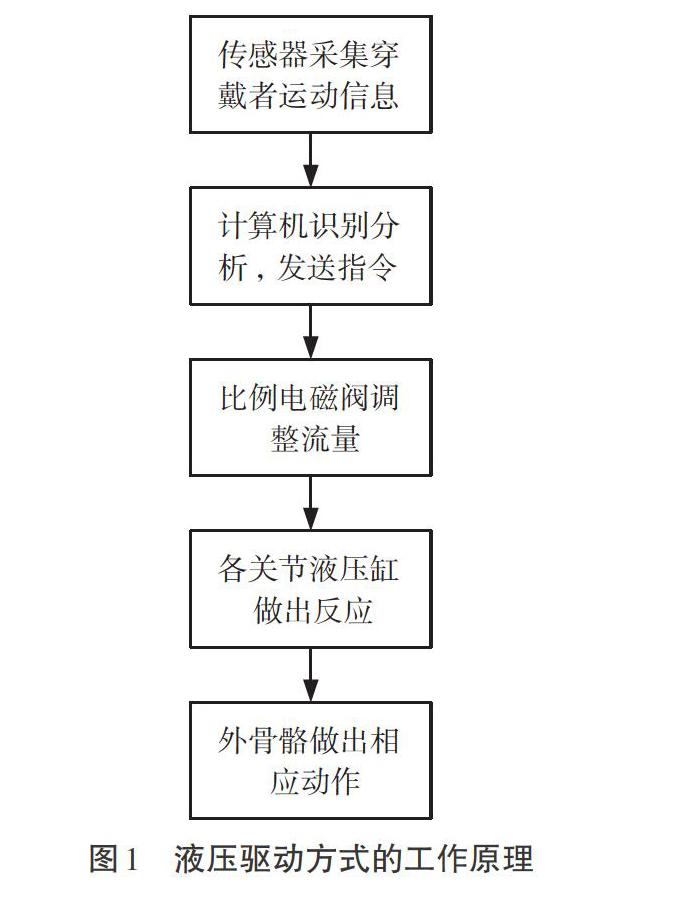
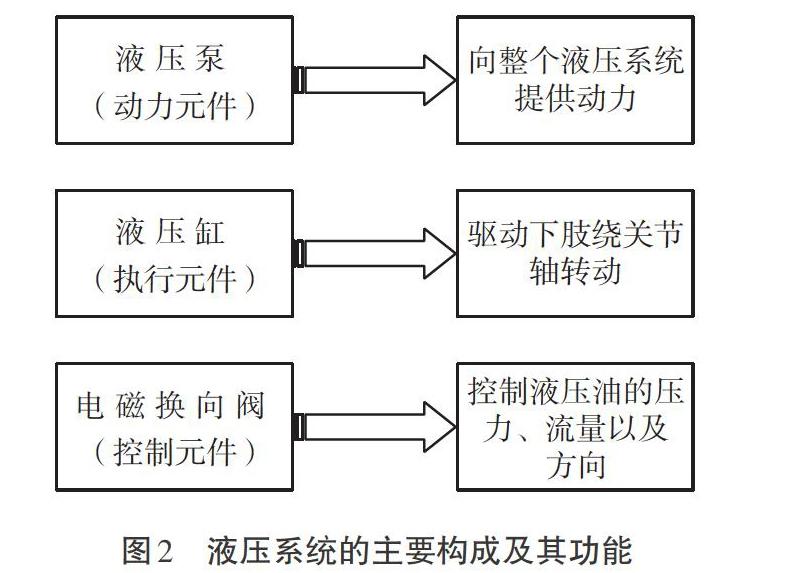
在當今機器人和自動化應用中,非常注重高功率-質量比[3]。而液壓驅動存在較大的功率-質量比,可以提供良好的運動速度和堅固性,同時確保了可靠性。液壓驅動通過流體介質傳遞能量,從而實現傳動。液壓驅動方式的工作原理如圖1所示。液壓系統主要包括液壓泵、液壓缸和電磁換向閥等元件(如圖2所示)。液壓泵是動力元件,主要向整個液壓系統提供動力;液壓缸是執行元件,將系統內液體的壓力能轉換為機械能,使外骨骼的兩條下肢繞關節軸轉動;電磁換向閥包括壓力控制閥、流量控制閥和方向控制閥,分別控制著液體的壓力、流量以及方向。
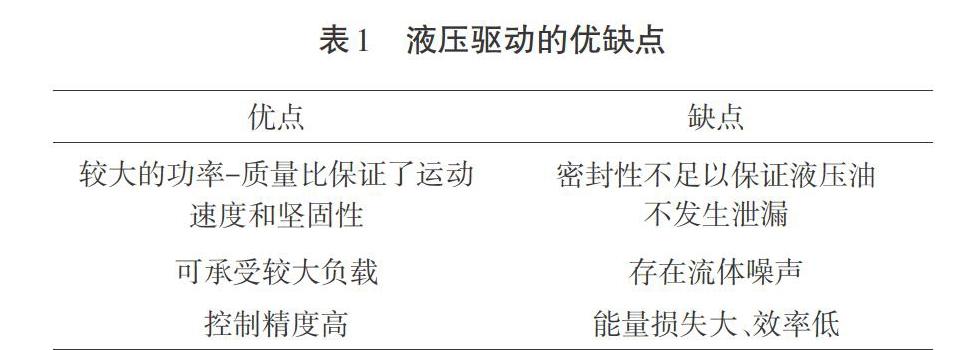
液壓系統控制外骨骼的每個關節,膝關節的數字液壓缸支持穿戴者實現蹲下和快速行走。液壓驅動有著較高的精度和靈敏度,優缺點如表1所示。BLEEX是加州大學伯克利分校研發的液壓驅動下肢外骨骼機器人[4],用于行軍負重。
1.2 氣壓驅動
氣壓驅動使用氣體作為介質,原理與液壓驅動類似,通過傳感器采集穿戴者動作,控制閥控制氣體,并推動氣缸活塞實現傳動,其行走的性能取決于所使用氣缸的效率。以機器人Gamma為例[5],其氣壓驅動系統的重要器件是紡織離合器(Textile Based Clutch,TBC),它是一種真空壓力驅動的機械式離合器,通過控制阻塞其機械元件來實現能量的儲存和釋放。TBC通過真空管線與閥門相連,空氣壓縮機壓縮空氣使得TBC系統嚙合,在穿戴者運動時,松緊帶會變長。
使用空氣壓縮來產生扭矩可實現外骨骼的輕量化,設計結構簡單,反應速度快,并且具有較強的抗沖擊性能。由于氣體的可壓縮性,系統的安全性大大提高,同時降低了設備成本。但是,氣動裝置控制精度低。
1.3 電機驅動
在下肢外骨骼上安裝電機,對髖關節、膝關節和踝關節起驅動作用,通過傳感器收集運動信息,發送到控制器和驅動器,分析其運動意圖及穿戴者的姿態變化,得出關節的旋轉角度,在電機的作用下對各關節發出指令,使外骨骼與穿戴者動作相一致。
電機驅動的優點是應用范圍廣、控制和維護方便、系統簡單、安全性較高,能提供較高的扭矩-質量比;但是其結構復雜,功率-質量比較低,導致難以承擔較大負載。
Berkely Bionics公司推出的第三代BLEEX外骨骼HULC是電機驅動方式,但它也含有液壓組件。其髖關節和膝關節各有一個液壓缸,最大可供負重91 kg,速度可達到4.8 km/h。
由美國范德堡大學研究人員研制的Vanderbilt外骨骼使用了一個齒輪比為24∶1的無刷-直流(BLDC)電機,提供80 N·m的扭矩。角度測量傳感器、單軸陀螺儀等器件會在外骨骼的關節處發揮作用。
1.4 人工肌肉驅動
采用人工肌肉驅動方式是近年來出現的一種新型驅動方式,它更多地采用了仿生學設計,模擬了人的肌肉,形成了擬人化的外部機械結構。人工肌肉來回收縮使關節轉動,從而實現了外骨骼的運動。目前,國內外主要流行的是氣動人工肌肉(PAM),這種驅動方式下的外骨骼機器人集氣動人工肌肉、輕型傳感器和控制軟件于一體,與人類肌肉的運動原理類似,是一種柔性執行器。每個氣動人工肌肉對應著人類腿部的肌肉,人工肌腱從氣動人工肌肉的末端延伸到腳部,用于移動腳踝。傳感器采集穿戴者的信息,改變金屬的電阻,從而通過控制軟件確定腳踝的位置以及所承受的壓力。
氣動人工肌肉具有較好的柔順性,同時也降低了設備重量。這種類型的外骨骼機器人具有優良的功率-體積比和功率-質量比,并且易于維護、響應快速。其不足之處是關節轉動范圍較小,使用范圍有限。
2 對下肢外骨骼機器人的展望
2.1 新的驅動方式的研究
四種驅動方式都存在一定的缺點,近年來,世界各國的研究者也在致力于解決相關問題。目前,新的驅動方式已經出現,如使用柔性驅動器的外骨骼康復機器人已經進入臨床測試[6]。哈佛大學的Octobot是柔性機器人,采用微流控來驅動[7]。
2.2 改進控制策略
對控制策略的探索與改進是研究的熱點之一。現有的下肢外骨骼機器人在控制策略上仍有改進的空間,如導納控制的不穩定性,這需要對阻抗模型進行優化。
2.3 優化機械結構
外骨骼機器人往往尺寸較大,優化機械結構能讓其在輕量化上邁進一大步,從而獲得更好的性能。具體而言,優化傳動方式、改進電池與蓄電設備、嘗試新型材料都可以作為優化的角度。
3 結語
本文介紹了下肢外骨骼機器人的四種驅動方式,概述了其優缺點,并探討了未來下肢外骨骼機器人的發展前景與發展方向。未來的下肢外骨骼機器人將會更加輕便和可靠,控制策略將更加完備,能用于更廣泛的領域。
參考文獻:
[1]KALITA B,NARAYAN J,DWIVEDY S K . Development of Active Lower Limb Robotic-Based Orthosis and Exoskeleton Devices: A Systematic Review[J]. International Journal of Social Robotics,2020(1).
[2]張增峰,陳煒,李浩,等.外骨骼機器人驅動方式的研究[J].醫療衛生裝備,2016(8):126-129.
[3]GUGLIELMINO E,SEMINI C,KOGLER H , et al. Power hydraulics - Switched mode control of hydraulic actuation[C]// 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 18-22, 2010, Taipei, Taiwan. IEEE. 2010.
[4]ZOSS A ,KAZEROONI H ,CHU A . On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX)[C]// Intelligent Robots and Systems, 2005. (IROS 2005). 2005 IEEE/RSJ International Conference on. IEEE, 2005.
[5]NATALI C D,SADEGHI A,MONDINI A,et al. Pneumatic Quasi-Passive Actuation for Soft Assistive Lower Limbs Exoskeleton[J].Frontiers in Neurorobotics,2020(14):31.
[6]下肢康復外骨骼機器人BEAR-H1[EB/OL].[2020-12-10].http://milebot.com.cn/exo/.
[7] Mazzolai B,Mattoli V . Robotics: Generation soft[J]. Nature,2016(7617):400-401.
