基于多項(xiàng)式Chirplet變換和變分模態(tài)分解的變轉(zhuǎn)速工況軸向柱塞泵故障診斷
2021-07-19 01:24:20吳主金肖朝昂湯何勝
液壓與氣動(dòng) 2021年7期
吳主金,肖朝昂,湯何勝,任 燕,和 猷
(溫州大學(xué)機(jī)電工程學(xué)院,浙江溫州 325035)
引言
軸向柱塞泵由于效率高、響應(yīng)速度快和使用壽命長(zhǎng)等優(yōu)點(diǎn),是流體傳動(dòng)和控制領(lǐng)域應(yīng)用最為廣泛的動(dòng)力源[1]。軸承是軸向柱塞泵中非常重要的部件,長(zhǎng)期處于高速、重載等惡劣的工作環(huán)境中,零部件較容易損壞。一旦軸承發(fā)生局部故障,可能導(dǎo)致機(jī)器突然停機(jī)和巨大的經(jīng)濟(jì)損失。當(dāng)軸向柱塞泵處于變轉(zhuǎn)速工況時(shí),所測(cè)得的故障軸承的振動(dòng)信號(hào)將失去周期性變化的規(guī)律,表現(xiàn)出極大的非平穩(wěn)性,并且會(huì)出現(xiàn)調(diào)頻、調(diào)幅和調(diào)相等現(xiàn)象[2-4]。在這種情況下,基于恒定轉(zhuǎn)速的傳統(tǒng)故障診斷方法不再適用。因此,如何從非平穩(wěn)信號(hào)中檢測(cè)出故障特征是故障診斷的一個(gè)重要研究領(lǐng)域[5]。
近年來(lái),國(guó)內(nèi)外諸多學(xué)者對(duì)非平穩(wěn)信號(hào)特征提取方法進(jìn)行了研究,常用的手段有階次跟蹤法和時(shí)頻域分析法[6-8]。階次跟蹤需要對(duì)信號(hào)進(jìn)行等角度重采樣,轉(zhuǎn)化為平穩(wěn)信號(hào)后進(jìn)行頻譜分析,可得到信號(hào)的階次譜。劉東東等[9]使用線調(diào)頻小波路徑追蹤和逐步解調(diào)分析法從振動(dòng)信號(hào)中提取轉(zhuǎn)速信號(hào),然后進(jìn)行階比分析。王曉龍等[10]利用階次追蹤、最大相關(guān)峭度解卷積和自互補(bǔ)頂帽變換相結(jié)合的方法從風(fēng)電組軸承的振動(dòng)信號(hào)中有效地提取了故障信息。YANG等[11]針對(duì)變轉(zhuǎn)速滾動(dòng)軸承故障模式難以識(shí)別的問(wèn)題,將局部均值分解與階次跟蹤相結(jié)合提取故障特征,再輸入到基于變量預(yù)測(cè)模型的分類(lèi)器中判別故障類(lèi)型。在時(shí)頻圖中可以同時(shí)看出信號(hào)時(shí)域與頻域的信息,更加全面的描述信號(hào)。WANG Tianyang等[12]采用基于快速譜峭度分析的短時(shí)傅立葉變換提取瞬時(shí)故障特征頻率,在相角域識(shí)別故障特征階數(shù)。王簫劍等[13]基于匹配解調(diào)和同步壓縮時(shí)頻分析技術(shù)提出了匹配壓縮脊線提取算法,該方法在分析非平穩(wěn)信號(hào)時(shí)有較強(qiáng)的魯棒性,所估計(jì)得瞬時(shí)轉(zhuǎn)動(dòng)頻率精度較高。QIN等[14]在解決變工況行星齒輪箱故障特征難以提取的問(wèn)題時(shí),結(jié)合Vold-Kalaman濾波和高階能量分離算法,可以得到分辨率更高的時(shí)頻表示,同時(shí)減少了交叉項(xiàng)干擾。
然而,傳統(tǒng)的時(shí)頻分析方法大多依賴(lài)短時(shí)傅里葉變換來(lái)提取瞬時(shí)頻率曲線。HUANG Hua等[15]針對(duì)階次跟蹤法精度不高以及重采樣過(guò)程消耗大量時(shí)間的問(wèn)題,提出了一種基于短時(shí)傅里葉變換與快速路徑優(yōu)化的多時(shí)頻曲線提取算法,利用平均曲線與曲線的比值來(lái)描述提取的曲線之間的關(guān)系,然后通過(guò)與故障特征系數(shù)的比較來(lái)實(shí)現(xiàn)故障診斷。短時(shí)傅里葉變換是一種具有靜態(tài)時(shí)頻分辨率的線性變換,但由于交叉項(xiàng)干擾和海森堡測(cè)不準(zhǔn)原理會(huì)造成時(shí)頻圖分辨率不足[16]。針對(duì)該問(wèn)題,本研究提出了一種基于多項(xiàng)式Chirplet變換和變分模態(tài)分解的方法來(lái)提取變工況下軸向柱塞泵軸承的故障特征。多項(xiàng)式Chirplet變換可以克服時(shí)頻模糊現(xiàn)象,得到能量集中度較高,聚集性很好的時(shí)頻分量,由此估計(jì)的信號(hào)瞬時(shí)轉(zhuǎn)動(dòng)頻率更接近理論值。變分模態(tài)分解(Variational Mode Decomposition,VMD)通過(guò)原始信號(hào)的頻率特征,可以將原信號(hào)分解為多個(gè)本征模態(tài)函數(shù)(Intrinsic Mode Functions,IMFS),并且此方法使用經(jīng)典維納濾波器減少了噪聲的干擾,同時(shí)該方法利用交替方向乘子方法來(lái)提高算法的效率和精度。
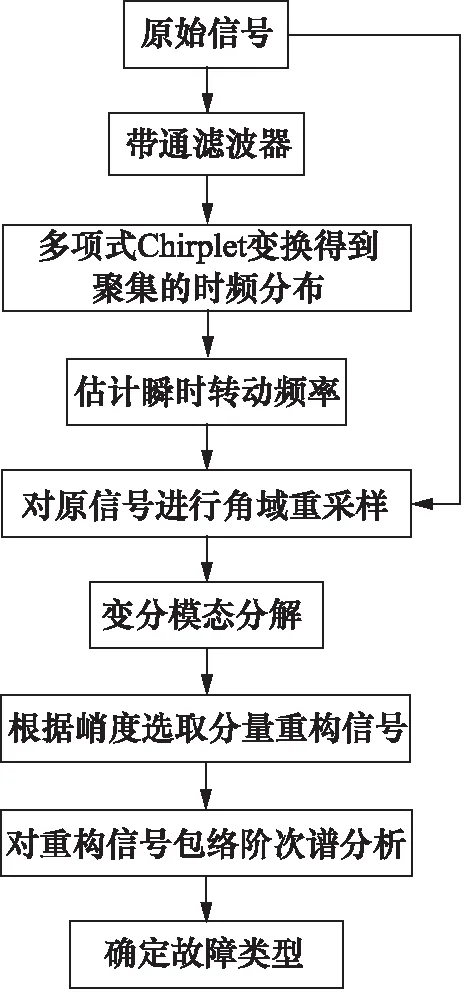
本研究結(jié)合多項(xiàng)式Chirplet變換和變分模態(tài)分解提出一種針對(duì)變轉(zhuǎn)速工況下軸向柱塞泵的軸承故障特征提取方法。首先,故障信號(hào)經(jīng)過(guò)多項(xiàng)式Chirplet變換,得到聚集性較高的時(shí)頻分布,并提取故障信號(hào)的瞬時(shí)頻率;然后,原始信號(hào)進(jìn)行角域重采樣;最后,對(duì)重采樣后的信號(hào)使用VMD算法,得到多個(gè)IMFS分量,再選取峭度值較大的信號(hào)分量進(jìn)行重構(gòu),并結(jié)合包絡(luò)階次譜分析,確定軸向柱塞泵軸承的故障類(lèi)型。
1 多項(xiàng)式Chirplet變換
在定轉(zhuǎn)速工況下所測(cè)得的平穩(wěn)信號(hào),常用Chirplet變換就可以得到較為清晰的時(shí)頻圖。但是在實(shí)際工況中,機(jī)器的瞬時(shí)轉(zhuǎn)頻是呈非線性變化的,傳統(tǒng)的時(shí)頻變換方法難以得到較好的效果,無(wú)法準(zhǔn)確估計(jì)出瞬時(shí)轉(zhuǎn)頻。針對(duì)該問(wèn)題,多項(xiàng)式Chirplet變換在傳統(tǒng)的Chirplet變換基礎(chǔ)上進(jìn)行了優(yōu)化與改進(jìn):
PCTS(t0,ω,α1,…,αn;σ)
(t-t0)exp(-jwt)dt
(1)
其中:
(2)
PCTS(t0,ω,α1,…,αn;σ)
(3)
從上述公式中可以看出,多項(xiàng)式Chirplet變換主要從以下2個(gè)方面進(jìn)行了改進(jìn):
(1) 用非線性頻率旋轉(zhuǎn)算子分析信號(hào);
(2) 用非線性移頻算子對(duì)待分析信號(hào)進(jìn)行移頻。
2 階次跟蹤
在分析變工況下的振動(dòng)信號(hào)時(shí),階次跟蹤是一種常用的信號(hào)處理方法。該方法通過(guò)等時(shí)間采樣和樣條插值等算法可以得到在角域中等角度采樣序列,其具體步驟為:
(1)計(jì)算等角度重采樣的恒角度間隔Δθ:
(4)
式中,Omax為最大分析階次。
(2) 計(jì)算等角度重采樣后數(shù)據(jù)的長(zhǎng)度N:
(5)
式中,T—— 總采樣時(shí)間
fi(t) —— 參考軸的瞬時(shí)轉(zhuǎn)頻
(3) 計(jì)算鍵相時(shí)標(biāo)Tn(n=1,2,3,…,N):
(6)
式中,n為采樣時(shí)刻序列號(hào)。
(4) 插值重采樣,假設(shè)原始信號(hào)由離散的時(shí)間點(diǎn)t1,t2,…,tn及對(duì)應(yīng)的幅值x(t1),x(t2),…,x(tn),采用拉格朗日插值公式,即可求得角域重采樣信號(hào)x(Tn):

(7)
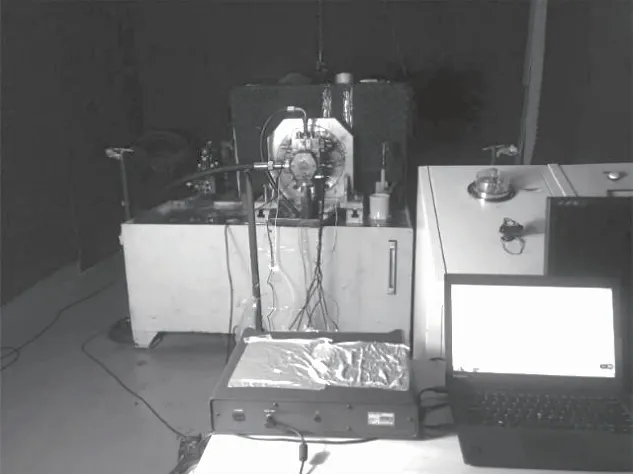
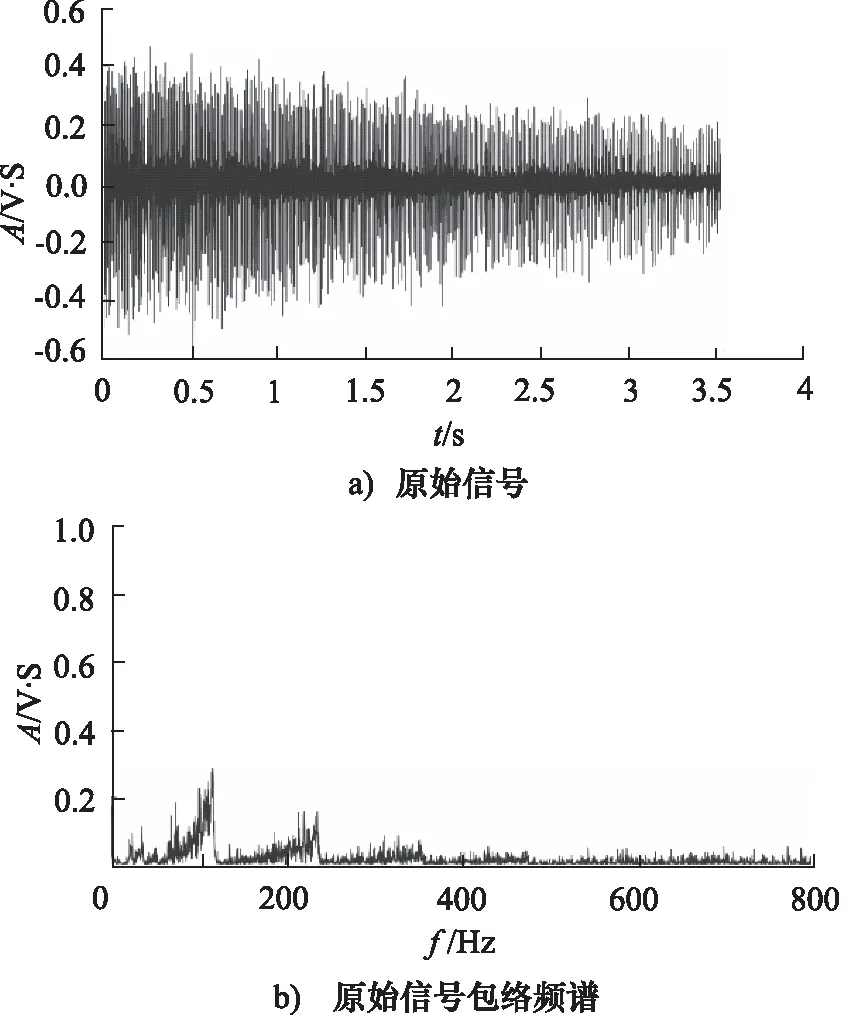
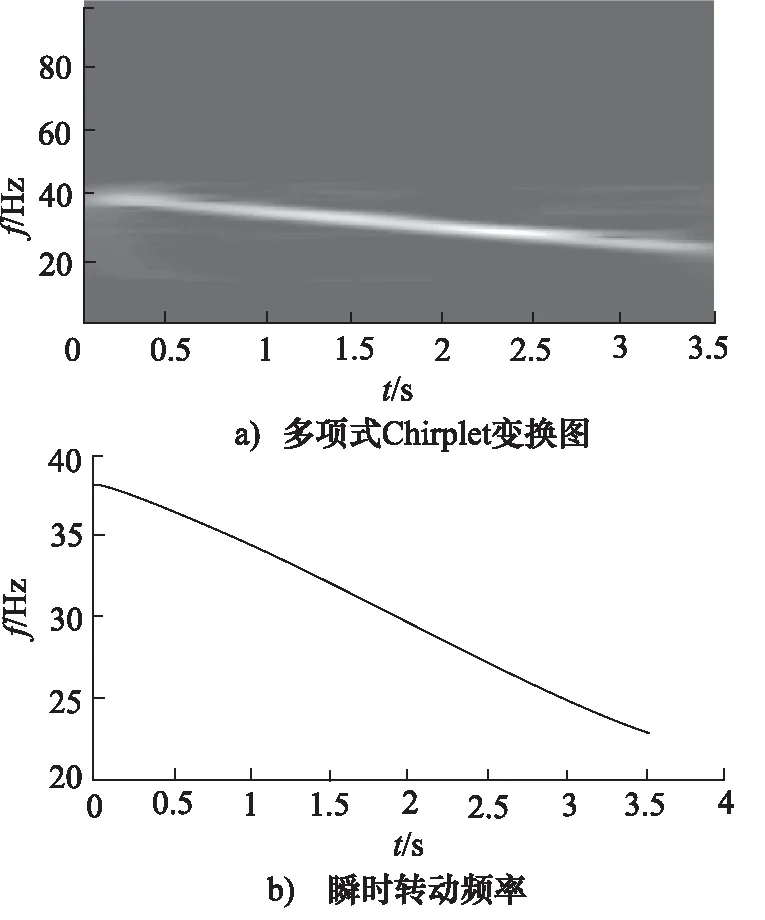
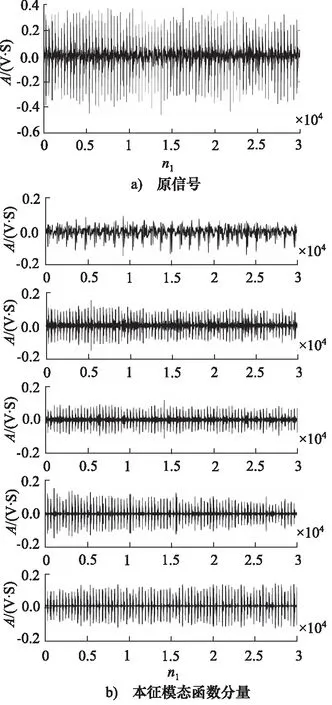
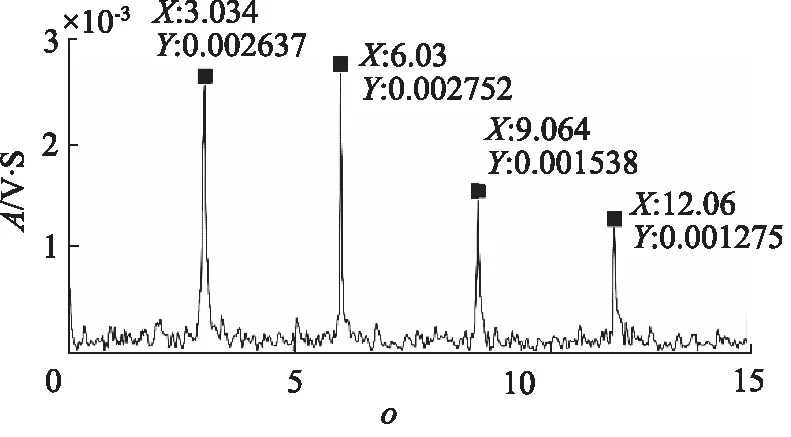
式中,ti 變分模態(tài)分解通過(guò)利用經(jīng)典維納濾波、希爾伯特變換和混頻處理的原理可以將待分析信號(hào)分解為多個(gè)IMFS,并且每個(gè)IMFS的帶寬和中心頻率都隨著迭代過(guò)程而變化。 假設(shè)原始信號(hào)是由多個(gè)有限帶寬的本征模態(tài)分量組合而成,相應(yīng)的變分模型可描述為: (8) 式中,t表示時(shí)間,為大于0的正數(shù);{uk(t)}={u1,u2,…,uk}表示分解得到的k個(gè)IMFS;{ωk}={ω1,ω2,…,ωk}表示各分量的中心頻率;δ(t)為沖激函數(shù);∑kuk表示所有模態(tài)分量之和。 在算法迭代的過(guò)程中,需要通過(guò)希爾伯特變換求待分析信號(hào)的單邊譜,再將所得結(jié)果與指數(shù)因子e-jwkt相乘,最后通過(guò)擴(kuò)展的拉格朗日函數(shù)對(duì)轉(zhuǎn)化之后所得到的非約束變分問(wèn)題求解。 本研究針對(duì)變轉(zhuǎn)速工況下軸向柱塞泵的軸承故障特征難以提取的問(wèn)題,提出了多項(xiàng)式Chirplet變換和變分模態(tài)分解相結(jié)合的診斷方法,算法的流程如圖1所示。在變工況的條件下,多項(xiàng)式Chirplet變換相較于傳統(tǒng)的時(shí)頻變換方法可以得到分辨率較高的時(shí)頻分表示,這更加便于提取軸承的瞬時(shí)轉(zhuǎn)頻。基于瞬時(shí)頻率的角域重采樣可以將非平穩(wěn)的時(shí)域信號(hào)轉(zhuǎn)為平穩(wěn)的角域信號(hào),來(lái)消除轉(zhuǎn)速對(duì)后續(xù)信號(hào)處理的影響。最后再對(duì)VMD分解后的分量重構(gòu)并作包絡(luò)階次譜分析,消除噪聲分量,突出信號(hào)的故障特征頻率。 通過(guò)軸向柱塞泵軸承故障實(shí)驗(yàn)來(lái)驗(yàn)證上述方法的可行性,實(shí)驗(yàn)采用HL-A4VSO-40 型軸向柱塞泵,實(shí)驗(yàn)裝置如圖2所示,主要包括伺服電機(jī)、加速度傳感器、轉(zhuǎn)速傳感器、實(shí)驗(yàn)柱塞泵、數(shù)據(jù)采集系統(tǒng)等。在活塞泵的外表面安裝了4個(gè)壓電加速度計(jì)(YMC-122A25型)來(lái)測(cè)量加速度響應(yīng)。 圖1 算法流程圖 圖2 實(shí)驗(yàn)裝置 如圖3所示,實(shí)驗(yàn)中所用的軸承外圈故障由線切割機(jī)床加工而成,寬為0.5 mm,深為0.5 mm。軸承中徑D為33.47 mm,接觸角θ為0°,滾動(dòng)體個(gè)數(shù)Z為8,滾動(dòng)體直徑d為7.93 mm,采樣頻率設(shè)置為25600 Hz。 圖3 軸承外圈故障 計(jì)算外圈理論故障特征頻率的公式為: (9) 將所述的滾動(dòng)軸承參數(shù)代入式(9)中得到,軸承外圈理論故障特征頻率fouter=3.05。 從實(shí)驗(yàn)臺(tái)采集的原始振動(dòng)信號(hào)如圖4a所示,對(duì)原始信號(hào)進(jìn)行包絡(luò)頻譜分析得到如圖4b所示的結(jié)果。從所得的包絡(luò)頻譜中,無(wú)法找到較為明顯的故障信息,難以確定故障類(lèi)型。為了便于后續(xù)的信號(hào)處理過(guò)程,對(duì)原始信號(hào)進(jìn)行降頻采樣,采樣頻率為原始采樣頻率的1/128;然后,引入帶通濾波器消除旋轉(zhuǎn)頻率諧波的干擾。在實(shí)驗(yàn)數(shù)據(jù)采集過(guò)程中,在8 s內(nèi)將旋轉(zhuǎn)頻率從40 Hz降到0,本研究選擇10000~100000點(diǎn)作為原始信號(hào)。旋轉(zhuǎn)頻率的先驗(yàn)知識(shí),將28 Hz設(shè)為帶寬為30 Hz 的帶通濾波器的中心頻率。 圖4 采集的信號(hào)及頻譜分析 對(duì)帶通濾波后的信號(hào)進(jìn)行短時(shí)傅里葉時(shí)頻變換,只能得到分辨率較低的時(shí)頻圖,如圖5a所示。基于該時(shí)頻圖估計(jì)的瞬時(shí)轉(zhuǎn)動(dòng)頻率是不準(zhǔn)確的,有較大的幅度波動(dòng),如圖5b所示。 圖5 時(shí)頻圖及瞬時(shí)轉(zhuǎn)動(dòng)頻率估計(jì) 為了得到時(shí)頻分辨率較高、聚集性較好的時(shí)頻分布,對(duì)帶通濾波后的信號(hào)進(jìn)行多項(xiàng)式Chirplet變換,圖6a為多項(xiàng)式Chirplet變換后的時(shí)頻圖,估計(jì)的瞬時(shí)轉(zhuǎn)動(dòng)頻率如圖6b所示。 圖6 Chirplet變換后的時(shí)頻分布 通過(guò)上述兩種時(shí)頻分析方法的對(duì)比可知,相較于傳統(tǒng)方法,多項(xiàng)式Chirplet變換更加適用于處理非平穩(wěn)信號(hào),可以得到更好的結(jié)果。在估計(jì)瞬時(shí)轉(zhuǎn)動(dòng)頻率后,就可以將原始非平穩(wěn)信號(hào)在角域重采樣為平穩(wěn)信號(hào),如圖7所示。 圖7 角域信號(hào) 為了便于計(jì)算,取前30000個(gè)點(diǎn)作VMD分解,原始信號(hào)如圖8a所示,分解后的各本征模態(tài)函數(shù)分量如圖8b所示。 圖8 VMD分解分析圖 在得到本征模態(tài)函數(shù)分量后,為了消除信號(hào)中的噪聲分量,選取峭度較大的3個(gè)分量重構(gòu)信號(hào),最后對(duì)重構(gòu)后的信號(hào)作包絡(luò)階次譜分析,得到如圖9所示的結(jié)果,從圖中可以清晰的看到軸承的一階到四階故障階次,與理論值相比較可確定為外圈故障。 圖9 重構(gòu)信號(hào)包絡(luò)階次譜 為了進(jìn)一步驗(yàn)證所提出算法的有效性,本實(shí)驗(yàn)采集了不同轉(zhuǎn)速下的柱塞泵軸承外圈故障振動(dòng)數(shù)據(jù),共計(jì)60組,通過(guò)所提出的方法進(jìn)行處理得出結(jié)果,皆可以判斷出軸承的故障類(lèi)型。 實(shí)驗(yàn)結(jié)果表明,本研究提出的方法能有效地生成高分辨率的時(shí)頻圖并提取精度較高的瞬時(shí)轉(zhuǎn)動(dòng)頻率,再通過(guò)VMD分解重構(gòu)角域重采樣信號(hào)來(lái)進(jìn)一步減少噪聲,最終可以從得到的包絡(luò)階次譜中清晰的判斷出故障類(lèi)型。該方法有較強(qiáng)的魯棒性,即使是軸承早期的微弱故障也可以識(shí)別出來(lái),是檢測(cè)變轉(zhuǎn)速軸向柱塞泵軸承故障的一種可行的新工具。 (1) 提出了一種基于多項(xiàng)式Chirplet變換和變分模態(tài)分解的變轉(zhuǎn)速軸向柱塞泵軸承故障診斷方法,并且通過(guò)軸向柱塞泵軸承故障實(shí)驗(yàn),與傳統(tǒng)的時(shí)頻分析方法進(jìn)行對(duì)比,驗(yàn)證了該方法的優(yōu)越性。 (2) 提出的方法優(yōu)勢(shì)在于多項(xiàng)式Chirplet變換有效地克服了傳統(tǒng)時(shí)頻分析方法的缺點(diǎn),提供了高分辨率的時(shí)頻圖,以便于提取精度更高的瞬時(shí)轉(zhuǎn)動(dòng)頻率,角域重采樣可以消除變轉(zhuǎn)速對(duì)信號(hào)處理帶來(lái)的影響,根據(jù)峭度值選取VMD分量重構(gòu)信號(hào)可以提高信噪比,保證了在包絡(luò)階次譜中可以更加清晰地識(shí)別故障類(lèi)型。3 變分模態(tài)分解(VMD)
4 算法流程
5 實(shí)驗(yàn)研究
5.1 實(shí)驗(yàn)裝置

5.2 算法性能分析

6 結(jié)論
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
