
手推式洗地機智能化改造研究
2021-07-22 02:55:44褚明杰
中國科技縱橫 2021年7期
關鍵詞:智能化
褚明杰
(沈陽新松機器人自動化股份有限公司,遼寧沈陽 110168)
0.引言
2020年,受新冠疫情影響,市場對商業清潔機器人需求旺盛,商用清潔機器人在機場、醫院、辦公區等多個應用場景加速落地。然而由于商用清潔機器人應用規模較小,價格相對手推式洗地機或有人駕駛洗地機要貴很多,不利于商業化推廣。
基于此,本文提出了對手推式洗地機進行智能化改造的方案。在手推式洗地機上加裝激光雷達、聲吶、電機、控制器等智能化部件,使改造后的洗地機能夠自主導航、自動清潔場地,且可定時定點工作,擺脫工作時段及人工操作的限制。以低于商用自動清潔機器人的成本,實現其主要功能的智能化改造。
1.改造方案
1.1 需求分析
目前用于商用自動清潔場景的機器人主要有以下3個功能:(1)自動清潔,脫離人工操作,自主完成路面或地面的清掃、灑水等工作;(2)自主導航,機器人通過激光SLAM技術沿自動規劃路線行走同時清潔行走過的路線[1];(3)云端功能,可通過云端管理機器人,實時讀取機器人狀態數據進行分析及設備異常預警,并生成清潔任務報告反饋。
1.2 改造方案
手推式洗地機主要分為拖線式、電瓶式及自走式3類。拖線式沒有電瓶,需要插電工作。電瓶式里面有電池,可以脫開電源工作,工作范圍較大。自走式安裝有行走電機,清潔效率和工作范圍都要更優。還有些以根據工況手動調節刷盤下壓的壓力及行走速度,達到最佳清潔效果。如圖1所示,手推式洗地機的控制系統主要分為3部分。操作面板安裝有一些模擬量控制旋鈕,并將控制信號轉接到控制板,控制板內有控制及功率放大電路,控制水泵、電機等設備。整個系統由電池或插線供電,電池由充電器充電。虛線部分為自走式及更高級手推洗地機具備的功能。整個系統的控制全部為手動操作。
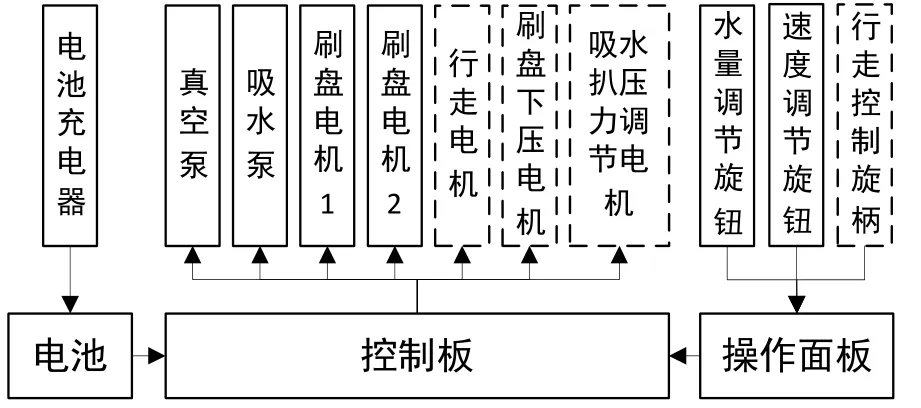
圖1 手推式洗地機系統架構
對手推式洗地機改造的方案是盡量保留原有電氣執行設備,加裝機器人智能化相關硬件板卡及傳感器。如圖2所示,增加機器人控制器、電機驅動器、電量監控板及用清潔控制板替換原有洗地機控制板。各板卡及控制器通過CAN接口組成CAN網絡。

圖2 改造系統框圖
機器人控制器是整個控制系統的核心,需要運行激光SLAM算法,對計算能力有較高要求,所以選用J1900為處理器的單板電腦。且具有雙網卡且可通過PCIe擴展WiFi及4G模塊。主要用于實現機器人自主導航定位、避障、自動回充及控制洗地機各電氣設備完成自動清潔等功能。為實現自主導航,需在洗地機上加裝激光雷達、深度視覺傳感器及聲吶傳感器。激光雷達具有測量功能,可將距離和角度信息輸出給機器人控制器,用于建立輪廓地圖及實時導航定位。聲吶傳感器及深度視覺傳感器安裝在機器人前方及側前方,可探測機器人前方2m以內障礙物,用于補償激光雷達掃描盲區。機器人控制器通過以太網及USB等接口,將獲取到的多傳感器信息進行數據融合解算,生成機器人自主規劃路徑,并控制電機完成機器人自主運動導航行走。
用清潔控制板替換手推式洗地機控制板。該板卡主要接收機器人控制器指令,并對刷盤、掛耙、水泵等清潔設備進行控制。在整個改造后的系統中,該板卡通過CAN總線與其他板卡進行通信。如圖3所示,板卡主控芯片采用TI 28035 DSP芯片,其自帶片上232和CAN通信接口,可以滿足板卡對外通信的功能。還通過自帶的SPI接口,在板卡上與EEPROM存儲芯片通信,用于存儲洗地機各電氣設備的控制狀態。刷盤電機、真空泵和凈水泵通過輸出24V電壓供電。AD模塊采集這3個設備工作電流,并通過對反饋電流的檢測,來決定是否繼續供電。刷盤升降推桿和刮降升降推桿均采用電缸來進行升降,DSP采用PWM波的方式進行24V換向輸出,控制電缸的升降。同時,DSP的QEP電路模塊采集電缸反饋的相位差為90°的A、B兩路脈沖方波,計算出電缸的位置,并對電缸的運動進行控制。
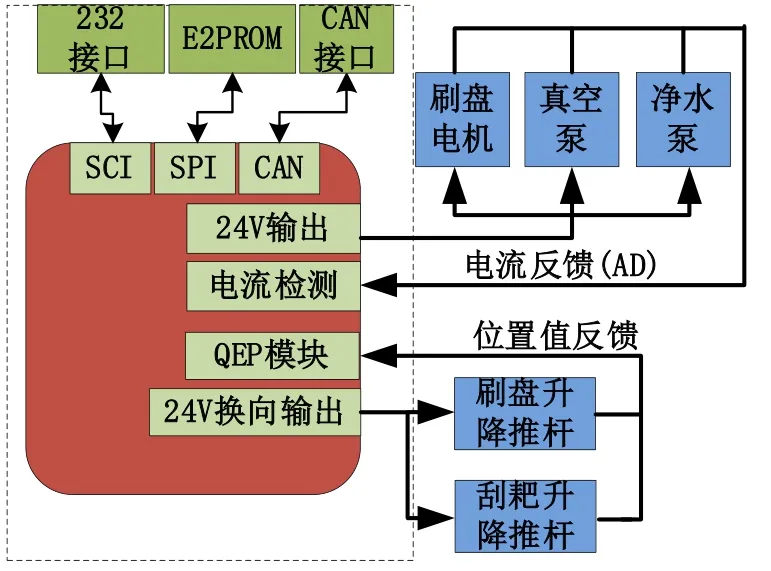
圖3 清潔控制板架構
手動洗地機根據配置不同,會不配或配有一個行走電機,無法實現差速旋轉,且沒有里程計等反饋裝置,無法滿足自主導航需要,所以將此部分電機及輪子整體替換為電機及外輪設計一體化的伺服電動輪,具有伺服電機高精度的優良特性,不需要減速箱,安裝極其方便。且低速特性突出,平穩性好,最低速度可達±1rpm,相比傳統無刷+減速機方案,由于沒有減速箱,靜音效果非常好。伺服電動輪的控制采用帶CAN接口的一拖二型驅動器,節省空間。
手推式洗地機一般只配有鉛酸電池且沒有BMS,無法精確計算電量[2]。本文中將鉛酸電池更換為三元鋰電池。考慮自動化改造后清潔效率會有較大提高,且低電量時可自動回充,充滿電后再繼續執行清潔任務,不需人工干預。可將鋰電池容量適當減小,并增加集成BMS的電量監控板,精確監控電池電量。且將開機啟動按鈕和急停按鈕接入到電量監控板,實現洗地機的上電邏輯控制。電量監控板卡主要包括電量監測采集板與電量監測CPU板兩塊板卡。其中電量監測采集板主要包含電流檢測、電壓檢測、板卡電源上電控制、上電軟啟動控制、機器人系統上下電控制等功能;電量監測CPU板主要包含電流檢測調理、電壓檢測調理、溫度檢測、上電邏輯控制、參數存儲、通訊等功能。
本方案中還設計有充電站,智能化改造后的洗地機在電量低時可以自主回充[3]。充電站內部電路主要分為兩部分,一部分為開關電源板卡,主要功能是將220V/AC轉換成32VDC/15A的直流電源;另一部分為控制板卡,主要是利用恒流模塊(LT3741)將輸出電壓、電流限制在30VDC/15A以匹配電池充電的電流、電壓,并利用熱插拔模塊(MIC2586X)控制輸出電流漸進式上升,防止接觸電流過大對洗地機本體電氣部件產生沖擊。
為使手推式洗地機具備云端功能,在遠程云端可以實時看到機器人狀態信息等。需通過機器人控制器的PCIe接口擴展無線網卡,通過4G或WiFi連接外網訪問云端服務器。另外機器人控制器還通過一個有線網口接無線路由器擴展WiFi熱點,可通過手機App遙控機器人,并建立清潔作業。
2.結論
本文分析了商用自動清潔機器人的基本功能,并提出了一種基于手推式洗地機智能化改造的方案,可以用較低的成本實現自動清潔機器人的基本功能。對商用自動清潔場景的加速推廣也是一種有益的探索。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年13期)2021-07-28 07:14:34
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國儲運(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車觀察(2018年10期)2018-11-06 07:05:08
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國公路(2017年12期)2017-02-06 03:07:25
