基于信號傳播修正的GNSS干擾源質心定位方法
2021-07-27 07:41:58楊志偉陳奇東廖桂生甄衛民
系統工程與電子技術 2021年8期
劉 睿, 楊志偉, 陳奇東,*, 廖桂生, 甄衛民
(1.西安電子科技大學雷達信號處理國家重點實驗室, 陜西 西安 710071;2.中國電波傳播研究所, 山東 青島 266107)
0 引 言
全球衛星導航系統(global navigation satellite system, GNSS)的信號落地功率低,約為-130 dBm。同時,信號采用擴頻體制,造成其功率譜密度更低,頻譜嚴重淹沒在環境噪聲中,容易受到電磁干擾的影響[1]。目前,GNSS系統面臨著日益嚴重的干擾威脅,干擾事件也日益頻繁發生。針對GNSS系統的導航對抗已成為現代戰爭中奪取制勝信息的關鍵[2],對于干擾源快速有效的定位成為保障國防安全和通信、電力、民航等關鍵設施GNSS安全應用的重要手段。
常用的GNSS干擾源定位方法有基于波達方向(direction of arrival, DOA)的定位方法[3],基于到達時間差(time difference of arrival, TDOA)的定位方法[4]和基于接收信號強度(received signal strength,RSS)的定位方法[5]。其中,基于DOA的定位方法需要接收機配備陣列天線以獲取無線電信號的到達角度;基于TDOA的定位方法要求接收機配備高精度、高穩定度的時鐘以維持接收機之間的同步,通常需要GNSS授時,而GNSS在受干擾情況下難以準確授時;因基于RSS的定位方法設備復雜度低而廣泛應用于GNSS干擾源定位,但定位方程求解復雜且定位精度較低。文獻[6]提出了基于差分到達信號強度(differential RSS, DRSS)的定位方法,一定程度上差分掉接收機之間的測量誤差和作為未知量的干擾功率,提升了RSS定位方法的定位精度,但沒有解決定位方程求解復雜的問題。文獻[7]通過求解被干擾接收機的位置質心實現對目標干擾源的定位,解決了RSS方法迭代收斂困難的問題,但求解質心時沒有考慮針對接收機受干擾的情況分配權重,定位精度較低。文獻[8]在文獻[7]的基礎上,根據測量得到的干擾源RSS對權值進行調整,一定程度上提升了定位精度。但上述基于RSS的定位方法均采用理想傳播模型,未考慮復雜場景(如城市環境中不開闊、多徑等)給定位方法帶來的嚴重困擾。
本文針對上述問題,提出了一種基于載噪比加權和干擾信號傳播誤差修正的GNSS干擾源質心定位方法。該方法通過測量GNSS接收機的載噪比實現對目標干擾源的定位,實現簡單,無需對GNSS接收機做任何軟硬件的改動,適用于大數據場景下的GNSS干擾源定位。同時,基于接收機受干擾程度對質心定位方法進行加權,在減少計算復雜度的同時保證定位效果;還采用神經網絡方法建立傳播模型,準確確定傳播影響因子,提升定位精度。最后通過實驗對比了本文方法與文獻[7-8]的定位方法,結果表明本文定位效果具有明顯提升。
1 定位模型
本文GNSS干擾信號定位場景如圖1所示,在目標監測區域內隨機分布多個GNSS接收機,并且接收機的坐標已知,通過對接收機的坐標[xi,yi]加權求和,確定目標干擾源位置[xt,yt],利用GNSS衛星信號載噪比確定權值,受干擾影響越大的GNSS接收機,其衛星信號載噪比的變化越大,質心定位所占權重應越大。
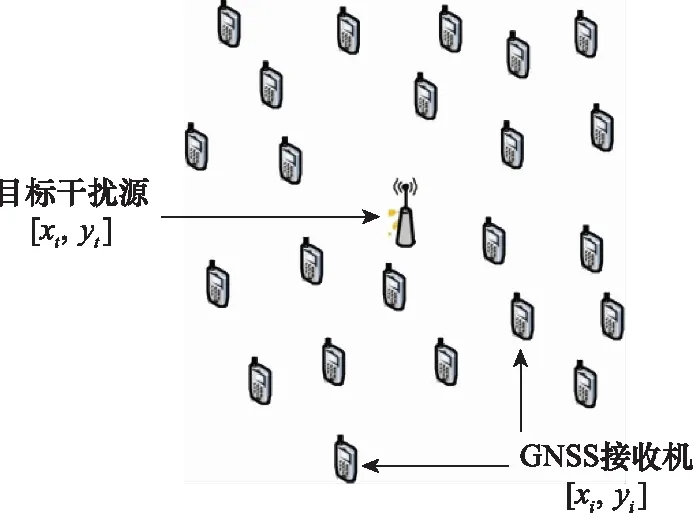
圖1 GNSS干擾信號定位場景
2 所提方法描述
2.1 干擾源的加權質心定位方法
加權質心定位方法在文獻[9]中首次被提出,應用于Zigbee設備的定位。在本文應用場景中,GNSS接收機坐標為Ci=[xi,yi],1≤i≤N,目標干擾源位置Ct=[xt,yt]的估算公式如下:
(1)
式中:ωi為接收機i的對應權值,權值的大小取決于對應接收機與干擾源距離的大小。兩個接收機i=a,i=b的權值滿足以下公式:
(2)

L=Pt-Pr=L0+10αlgd+v
(3)
式中:L為傳播路徑損耗;Pt為發射功率;Pr接收功率;L0為距離發射機1 m處的傳播損耗;d為發射機與接收點的距離;α為路徑損耗指數;v是表示噪聲的高斯隨機變量。對于本文所涉及的應用,接收功率Pr可由GNSS提取的干擾源RSS代替。取接收機i=1為參考接收機,將2≤i≤N與參考接收機的RSS進行差分,利用式(3),可得出差分信號強度的對數表達式:
(4)
式中:RSSi、RSS1分別為接收機i和參考接收機的干擾源RSS,由于接收機分布的空間區域不大,空間噪聲值幾乎一致,因此v1-vi接近于0,可忽略。將式(4)代入式(2)得出:
(5)
將式(5)代入式(1)即可求出目標干擾源的位置。下文介紹通過引入載噪比實現式(5)中權值的估計方法。
2.2 基于載噪比的干擾權值估計方法
GNSS接收機在跟蹤階段會實時估算衛星信號的載噪比,干擾信號使接收機的載噪比減小,文獻[11]給出了干擾影響下,GNSS接收機的載噪比計算方法,公式如下:
(6)
式中:(C/N0)eq為受干擾影響下的等效載噪比,C/N0為無干擾下的載噪比;J/C為干擾功率與衛星信號功率之比;Q為與發射信號和接收信號類型相關的擴頻處理抗干擾品質因子;Rc為偽碼速率。以dB·Hz為單位,式(6)可表達為
(C/N0)eq,dB?10lg(C/N0)eq=
(7)
式中:(C/N0)dB=10lg(C/N0),單位為dB·Hz;(J/C)dB=(J)dB-(C)dB=10 lg(J/C),單位為 dB。可以由式(7)導出基于載噪比的干擾RSS對數表達式:
RSS=(J)dB=(C)dB+
(8)
式中:(C)dB=10lgC。式(8)建立了基于GNSS接收機的觀測載噪比(C/N0)eq,dB干擾到達信號強度RSS的估算方法。依據式(8)可得出基于觀測載噪比(C/N0)eq,dB的DRSSi對數表達式:
(9)
式中:
(10)
由于不同接收機的(C)dB、Q和Rc在本文應用場景中取值相同,所以可在推導過程中可被消去。
將式(9)代入式(5),可得
(11)
將式(11)代入式(1)中,可得出基于GNSS接收機載噪比加權的干擾源質心定位方法的定位結果:
(12)
由式(12)可知,若實現對干擾源的定位需正確設定參數α和β。下文給出這兩個參數的確定方法。
2.3 基于神經網絡建模的參數α和β的確定方法
通常基于RSS的定位方法采用自由空間傳播模型,將參數α取值為2,或者利用傳播模型確定傳播路徑損耗,從而確定參數α。常用的傳播模型包括Hata模型[12]、SUI(stanford university interim, SUI)模型[13]、Lee模型[14]和Egli模型[15],上述模型計算方便且限制條件少,但傳播路徑損耗導致預測精度較低,無法適用于所有傳播場景。本文提出了基于神經網絡建模參數α的確定方法,利用實測數據并采用神經網絡方法構建應用區域內參數α的模型,可顯著提升定位效果。
人工神經網絡方法在信息處理中模擬生物神經系統的行為,可為一組特定的輸入輸出找到最佳的函數擬合,并對未知的數據集進行插值和外推[16]。人工神經網絡由神經元組成,神經元模型如圖2所示。設向量x=[x1,x2,…,xq]T為神經元輸入,對神經元進行加權求和并添加神經網絡偏置b,可得u=ωTx+b=ω1x1+ω2x2+…+ωqxq+b,其中ω=[ω1,ω2,…,ωq]T為權值。將u通過激勵函數f(·)得到輸出結果y=f(u),其中激勵函數可為任何非線性可微函數。用目標數據t減去激勵函數輸出值y可得神經元輸出誤差e,即e=t-y。神經元模型采用某種優化準則,輸出最小誤差e。在本文應用場景下,目標值t為實測得到的參數α,y為網絡輸出的參數α。

圖2 神經元模型
本文神經網絡的設計依據為對下文實測數據的預測效果統計,采取最優預測效果的隱層神經元個數、激活函數和學習方法,具體統計結果見第3節。文獻[17]表明單隱層神經網絡可以逼近任何復雜的非線性函數,文獻[18-19]表明單隱層針對回歸問題具有良好的預測精度和泛化能力。隱藏層數越多不僅會增加方法復雜性,當訓練數據量不夠大時,還會導致模型更易擬合過度。本文神經網絡輸入變量個數為4個,分別為干擾源經度、干擾源緯度、接收機經度和接收機緯度;輸出變量為待確定參數α;隱層神經元個數為8個;神經元激活函數采用tansig函數;學習方法采用列文伯格-馬夸爾特(Levenberg-Marquardt, LM)算法[20]。對應神經網絡方法架構如圖3所示。

圖3 本文神經網絡設計架構
在確定神經網絡模型參數α后,利用實測數據對已知干擾源進行定位,遍歷所有參數β可能取值,對不同取值的定位效果進行統計,采用最優定位效果對應的參數β作為最終取值。
2.4 基于GNSS接收機載噪比加權和干擾信號傳播誤差修正的干擾源質心定位方法流程
基于GNSS接收機載噪比加權和干擾信號傳播誤差修正的干擾源質心定位方法流程如圖4所示。首先利用確定好的參數β,依據式(12)對干擾源進行首次定位,各接收機的參數α均取默認值2;然后利用構建好的神經網絡模型參數α對首次定位結果進行迭代修正,最終收斂得到更準確的干擾源位置。

圖4 基于信號傳播修正的GNSS干擾源質心定位方法流程圖
3 實驗分析
3.1 數據采集
實驗設備如圖5所示,包括GNSS接收機36臺、GPS L1干擾機1臺、多系統多頻點導航接收機1臺和筆記本電腦1臺。GNSS接收機采用常見手機,用于數據采集,手機具備GPS L1定位功能,手機安裝載噪比記錄APP,將包含載噪比和定位信息的NMEA數據以文件形式存儲于手機中。采用車載功率可調的GPS L1干擾機作為發射源,干擾機最大輸出功率為10 W。該車同時搭載多系統多頻點導航接收機,可在GPS L1頻點被干擾時獲得干擾源準確位置。采集數據以文件形式匯入到筆記本電腦,并由該電腦進行干擾定位處理和實驗數據分析。

圖5 實驗設備
實驗測試選用地面有建筑物和植被的場景,該場景下信號傳播存在遮擋、反射等,可產生衰落、多徑等效應,場景如圖6所示。其中,A區、B區、C區、D區、I區為低矮密集植被覆蓋區,E區為工廠廠房,F區為居民樓房,J區、K 區為高大稀疏植被覆蓋區,G區、H區、L區為農田,其中L區有一處水塘。
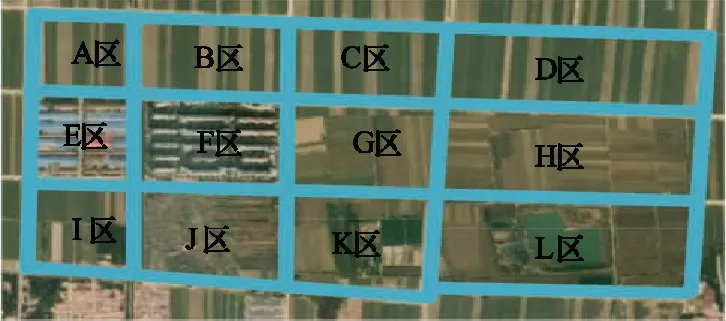
圖6 實驗場景
在該場景中,接收機布局及數據測試路線如圖7所示。圖7中,黑色方形點為接收機位置,接收機隨機分散布,設于約為2 km×2 km的區域內。在無干擾情況下,記錄接收機準確位置坐標,每秒采樣獲取其載噪比數據并記錄該數據采集時間。車載干擾機行駛路線為圖7中所標記的9條路線。車載干擾機在每條路線上勻速緩慢行駛5 min,36臺GNSS接收機獲取數據總量為97 200條,并將整個數據集被隨機分為70%的訓練集和30%的測試集。
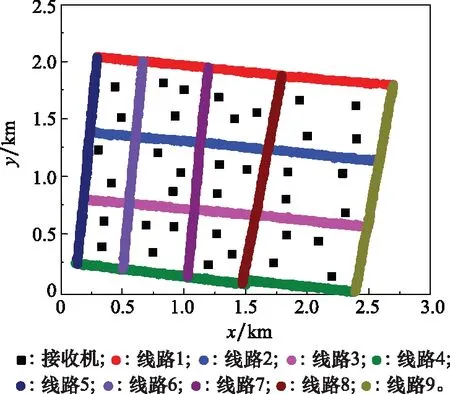
圖7 接收機布局及數據測試路徑
3.2 基于神經網絡建模的參數α和β的確定
利用上文訓練集采用神經網絡方法構建參數α模型,模型采用單隱層四輸入設計,本節內容給出隱層神經元個數、激活函數和學習方法對建模效果的影響,從而確定最合適的神經元數目、學習算法和激活函數。建模效果采用決定系數(R-square,R2)進行評價,R2計算公式如下:
(13)

(14)
神經網絡設計的神經元個數應在保證模型預測精度的同時,盡量取值較小以避免過度擬合。本文建模過程中遍歷統計神經元個數從1到16的建模效果,圖8給出了不同隱藏神經元數量對應的R2值。該實驗學習方法為LM算法,隱藏層和輸出層激活函數均為tansig。圖8結果表明神經元個數為8時,R2為最大值0.983 1,建模效果最好。

圖8 不同神經元個數對應的R2取值
神經網絡設計需同時考慮隱層和輸出層激活函數的選擇,本文對目前常用的3種激活函數進行不同隱層和輸出層的組合,對生成模型的參數R2進行統計,表1給出了統計結果。3種激活函數分別為logsig函數、tansig函數和purelin函數,對應函數公式如下:
fpurelin(u)=u
(15)
(16)
(17)
該實驗神經元個數為8,學習方法為LM算法。表1結果表明隱層和輸出層的激活函數均采用tansig函數時對應R2為最大值0.983 1,建模效果最好。
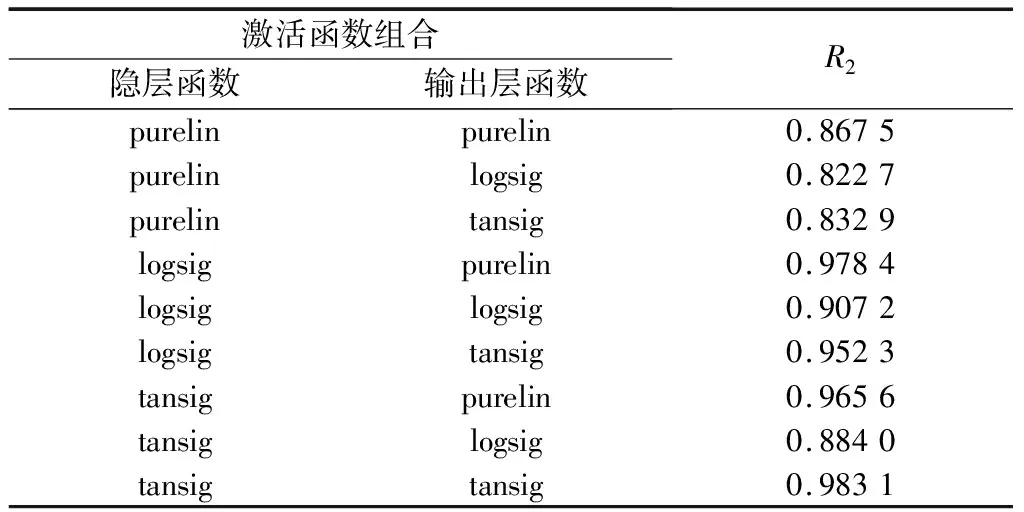
表1 不同激活函數組合對應的R2取值
神經網絡學習算法主要是構建合適的損失函數,損失函數的構建需要考慮模型在訓練數據集上擬合程度的同時,還要防止出現過擬合現象。本文算法通過對損失函數取值最小化實現神經網絡模型的權重ω和偏置b的確定。目前常用的學習算法為LM算法、BFGS(Broyden Fletcher Goldfarb Shanno, BFGS)擬牛頓算法[21]、量化共軛梯度(scaled conjugate gradient,SCG)法[22]、彈性傳播(resilient propagation training,RP)算法[23]、Fletcher-Reeves共軛梯度(conjugate gradient backpropagation with Fletcher-Reeves updates, CGF)法[20]和Polak-Ribiére共軛梯度(conjugate gradient backpropagation with Polak-Ribiére updates, CGP)法[24]。本文對上述6種方法生成模型的R2參數進行統計,表2給出了統計結果。該實驗神經元個數為8,隱藏層和輸出層激活函數均為tansig。表2結果表明采用LM算法進行學習時,R2為最大值0.983 1,建模效果最好。上述仿真結果表明,針對本文應用,隱層神經元個數需設計為8個,隱層和輸出層神經元激活函數應均采用tansig函數,學習方法需采用LM學習算法。采用本節神經網絡設計構建的實驗區域的參數α模型如圖9所示。圖10給出采用參數α模型的36臺接收機采用配備不同參數β對應的定位均方根誤差(root mean square error, RMSE),可以看出隨參數β增加,定位RMSE降低,當參數β≥3時,定位RMSE趨于穩定,因此本文實驗參數β取值為3。
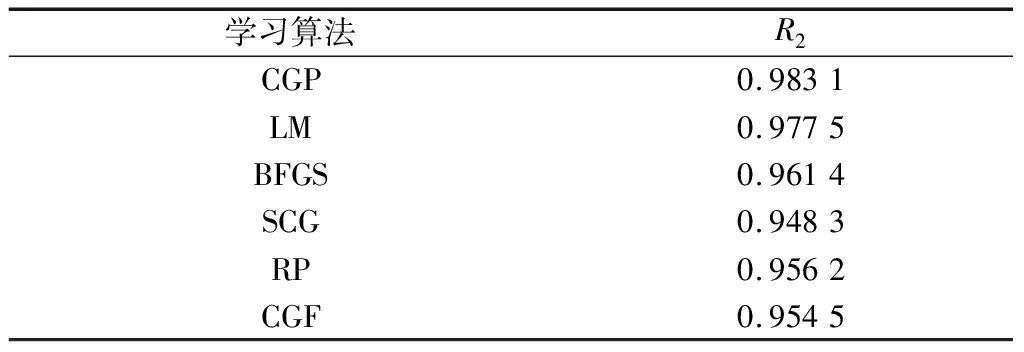
表2 不同學習算法對應的R2取值

圖9 實驗區域的參數α模型
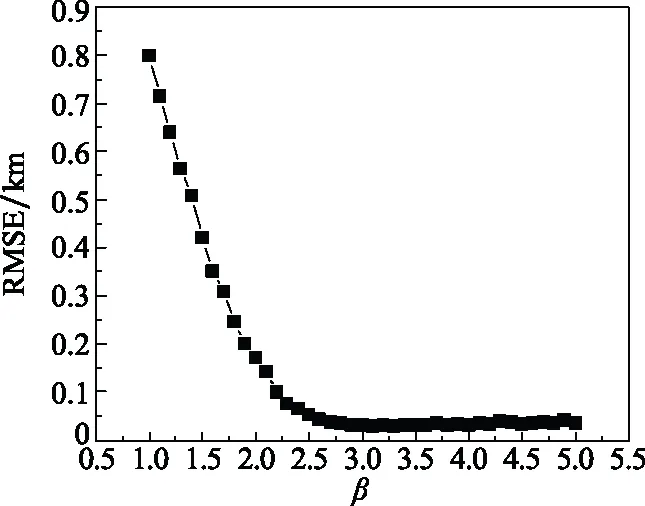
圖10 采用參數α模型的36臺接收機采用不同參數β對應的定位RMSE
3.3 定位結果
在完成參數α神經網絡模型構建的基礎上,給出本文方法的定位結果。圖11~圖13分別給出了不同接收機數量下,文獻[7]、文獻[8]和本文所提方法定位結果的對比。

圖11 12臺接收機定位結果

圖12 24臺接收機定位結果

圖13 36臺接收機定位結果
對上述場景定位結果的RMSE進行統計,如表3所示,實驗結果表明,參與定位的接收機數量越多,定位精度越高,同時相對于文獻[7]、文獻[8]方法,本文方法定位精度有顯著提升。

表3 定位RMSE
4 結 論
本文提出了一種基于載噪比加權和干擾信號傳播誤差修正的GNSS干擾源質心定位方法,利用通用GNSS接收機現有的載噪比信息就可實現GNSS干擾源的準確定位,無需改變接收機現有軟件與硬件。創新性地采用神經網絡方法,準確預測復雜環境的傳播影響因子,基于參數α模型和加權質心定位方法提升了復雜場景下傳統基于RSS定位方法的定位精度。實驗表明,本文所提方法的定位精度得到明顯提升。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
