一種基于PLL的牽引電機速度辨識算法
2021-07-28 00:57:26鞠艷杰黃石軍左運
大連交通大學學報 2021年4期
關鍵詞:模型
鞠艷杰,黃石軍,左運
(大連交通大學 電氣信息工程學院,遼寧 大連 116028) *
交流電機作為工業控制領域的重要電氣設備被廣泛應用,電機傳動系統是一個復雜的動力機械系統[1].軌道交通牽引傳動系統中目前所采用的牽引電機是交流感應電機,同樣,其是一個復雜的系統.傳統牽引傳動系統中檢測電機轉速所用的一般是機械式速度傳感器,其容易受環境影響,需要經常維護[2].為了提升牽引傳動系統的可靠性,牽引電機的無速度傳感器控制技術越來越受到學者們的關注.對于電機的速度辨識算法,目前主流的研究方向有信號注入法[3]、模型參考自適應法[4-5]、全階狀態觀測器[6-7]、擴展卡爾曼濾波器[8]以及滑模觀測器[9-10].
近年來,基于鎖相環(phase-locked loop,PLL)的速度辨識算法由于其易實現和優秀的性能成為新的研究熱點[11-12],但是PLL容易受到直流偏置、幅值突變等干擾的影響.本文提出一種基于PLL的速度辨識算法,在此算法中引入閉環轉子磁鏈觀測器和幅值歸一化環節,彌補PLL本身在抗干擾能力上的不足.通過閉環轉子磁鏈觀測模型抑制了轉子磁鏈中可能出現的直流偏置,引入幅值歸一化環節抑制了可能出現的轉子磁鏈幅值波動.最后通過仿真驗證了算法的正確性和有效性.
1 基于PLL的速度辨識算法

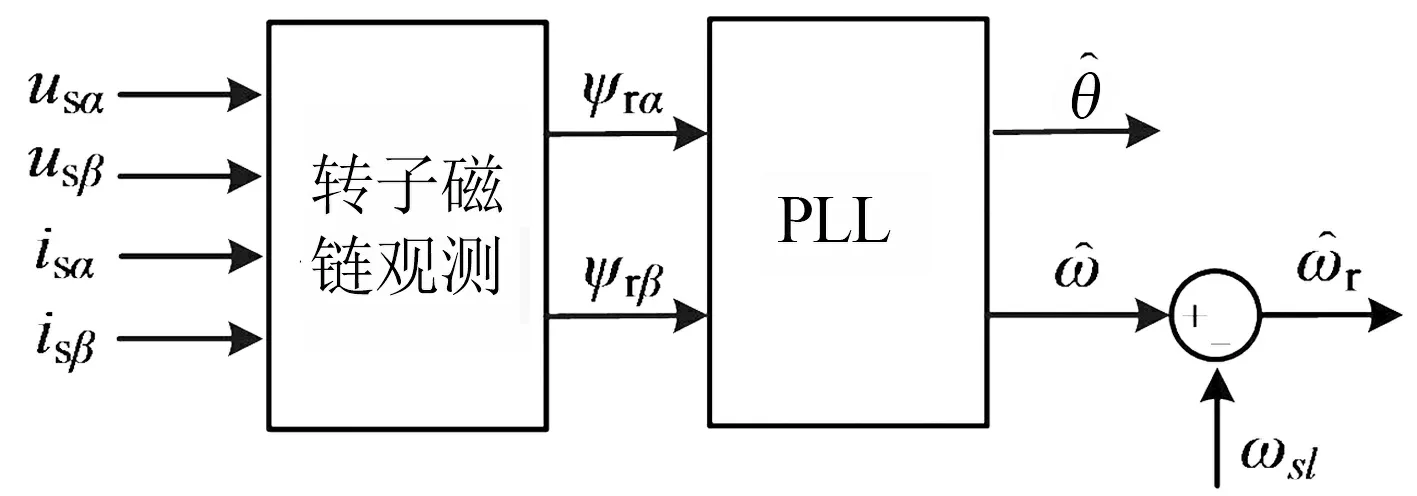
圖1 基于PLL的速度辨識算法框圖
傳統的牽引電機在兩相靜止坐標系下定子磁鏈的電壓模型:
(1)
式中:ψs=[ψsαψsβ]T,ψs為定子磁鏈矢量,us=[usαusβ]T,us為定子電壓矢量,is=[isαisβ]T,is為定子電流矢量,Rs為定子電阻,T為矩陣轉置符號. 利用感應電機在兩相旋轉坐標系下的數學模型,可以推導得到:
(2)
式中,Lm為互感,Tr為轉子時間常數,isq為定子

2 PLL及其性能
圖2中給出了PLL的框圖,包含三部分:相位檢測器(phase detector , PD)由d-q變換組成,環路濾波器(loop filter,LF)由比例積分(proportional integral,PI)組成,壓控振蕩器(voltage-controlled oscillator,VCO)由積分器組成.
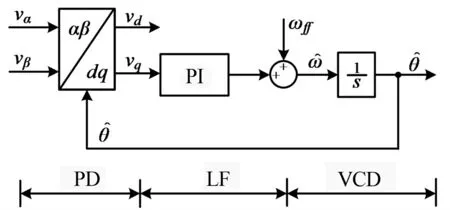
圖2 PLL結構框圖
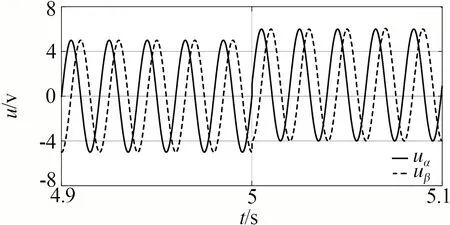
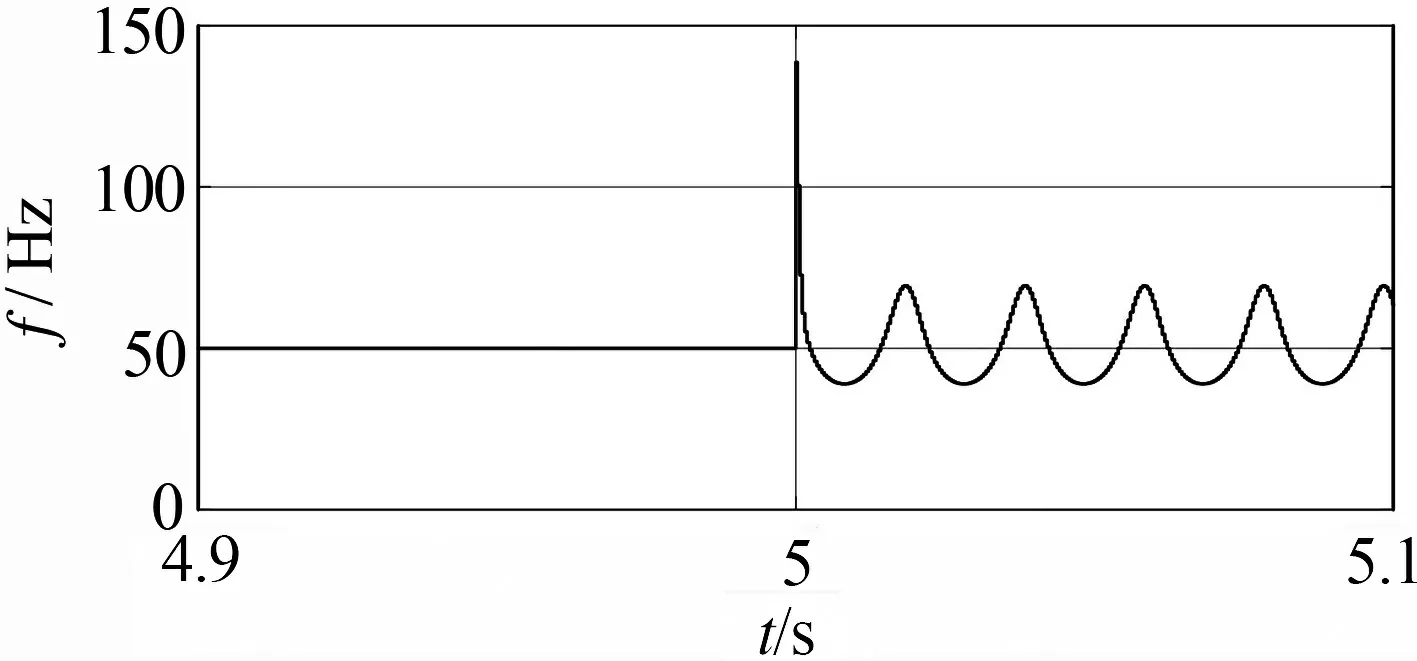
為驗證PLL的抗干擾性能,所做測試如圖3、圖4所示,從圖中可以看出當輸入信號出現直流偏置時,會使PLL的估計性能大大降低,同樣當幅值突變時,對PLL的估計性能也會有所影響.
(a) 輸入信號直流偏置突變
(b) 所測頻率波形圖3 PLL直流偏置影響測試
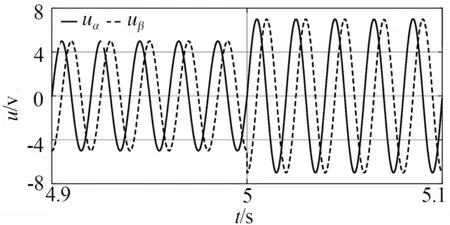
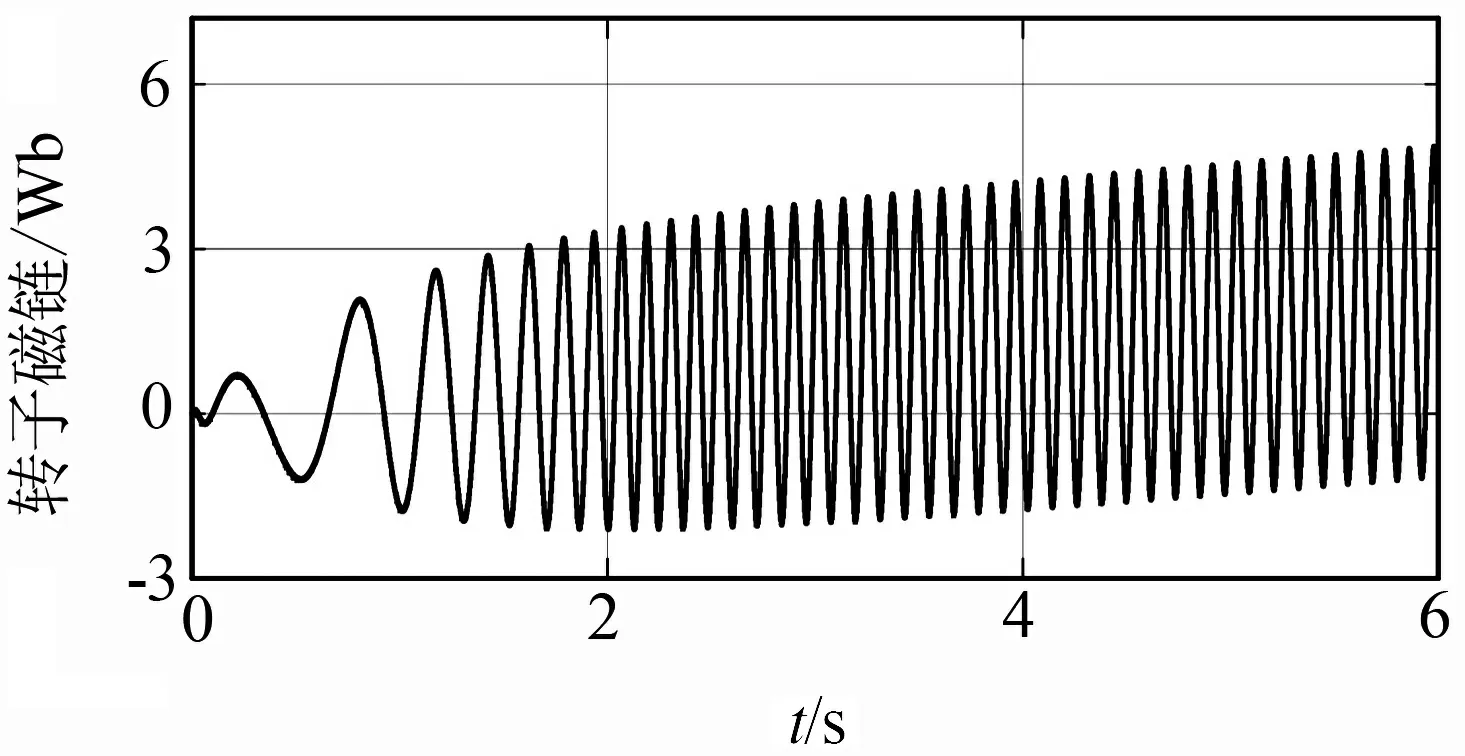
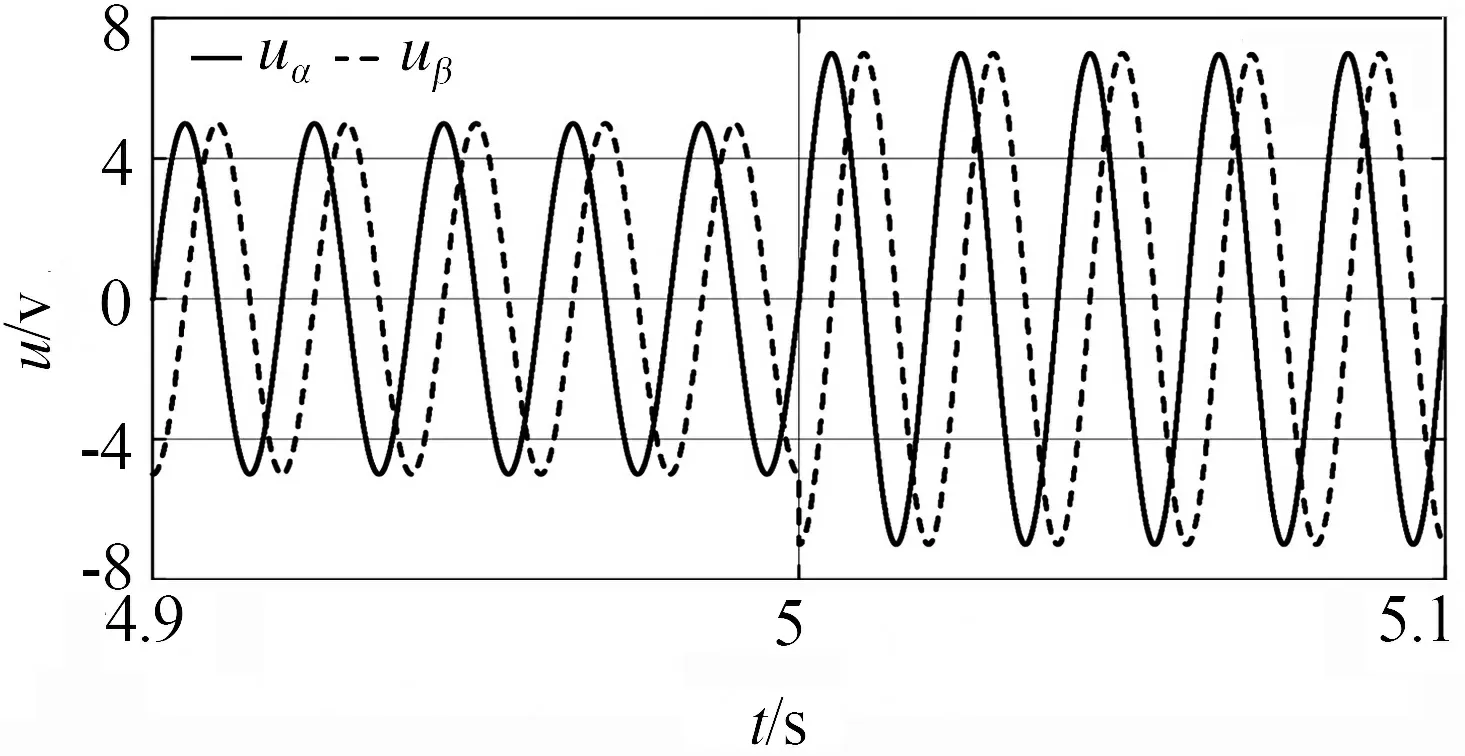
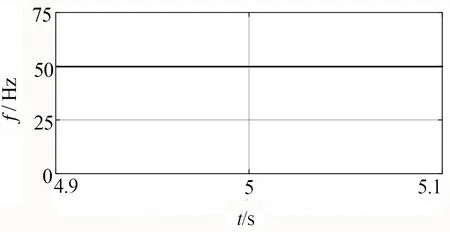
(a) 輸入信號幅值突變
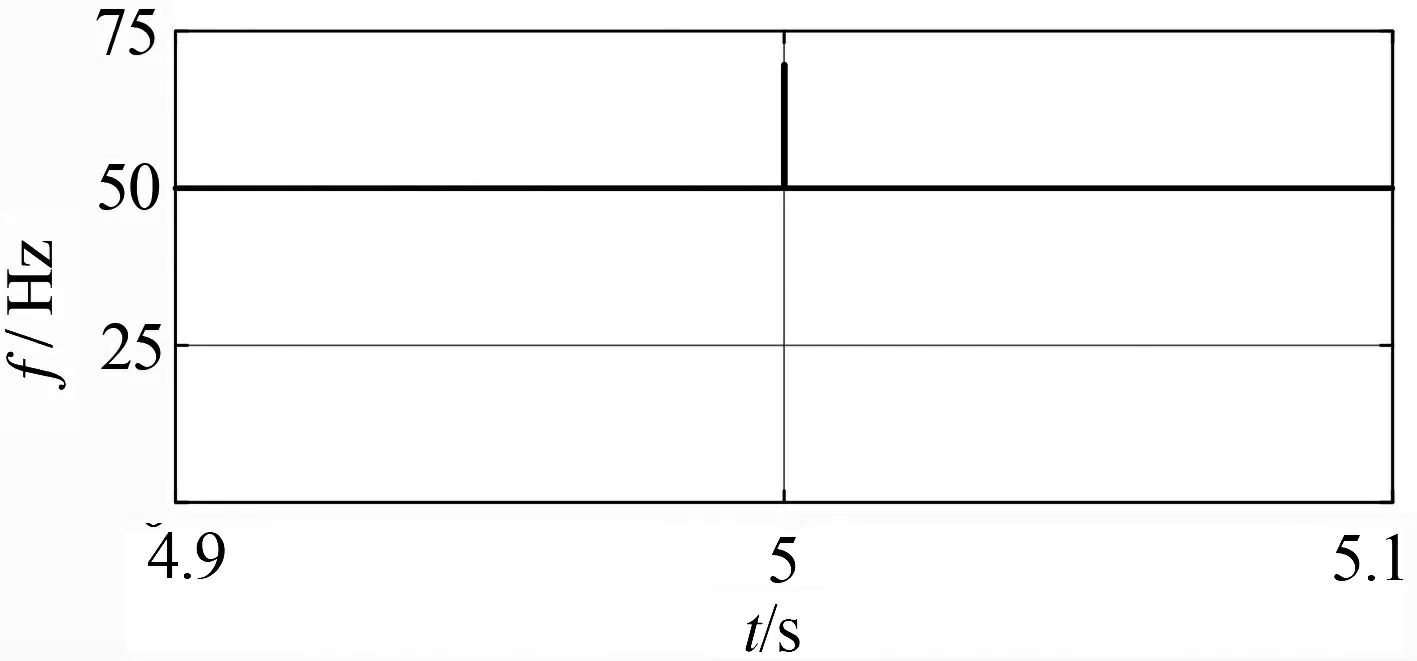
(b) 所測頻率波形圖4 PLL幅值突變影響測試
在實際中,由于電磁干擾、傳感器測量和采樣誤差等會造成純積分環節直流偏置和積分飽和的問題[13],另外,由于牽引電機工況的復雜性,轉子磁鏈幅值會經常變化,為降低可能出現的干擾影響PLL的估計性能,必須采取一些措施提升基于PLL的速度辨識算法的抗干擾性.
3 改進后的基于PLL的速度辨識算法
3.1 閉環轉子磁鏈
電壓模型的實際應用由于模型中對反電動勢的純積分環節易引起引起直流偏置,從而導致觀測誤差,對PLL的估計性能造成干擾.文獻[14]提出一種閉環轉子磁鏈模型,將電壓電流模型相結合,解決傳統電壓型轉子磁鏈模型的直流偏置問題.
當按轉子磁鏈進行定向解耦時,牽引電機在兩相旋轉坐標系下的轉子磁鏈的電流模型:
(3)
ψrq=0
(4)
式中,ψrq為轉子磁鏈在q軸的分量,isd為定子電流在d軸的分量.為了補償積分和定子電阻壓降引起的誤差,將定子磁鏈的電壓模型修正為:
(5)
式中,Ucom為補償量,可以通過比例積分調節器來實現:
(6)
式中,ψ′s為電流模型計算出的定子磁鏈,Kp、Ki為比例積分調節器增益.
根據感應電機在兩相坐標系下的數學方程可以得到以下關系式[15]:
(7)
式中:ψr=[ψrαψrβ]T,ψr為轉子磁鏈矢量,Ls為定子電感.閉環轉子磁鏈觀測框圖如圖5所示.
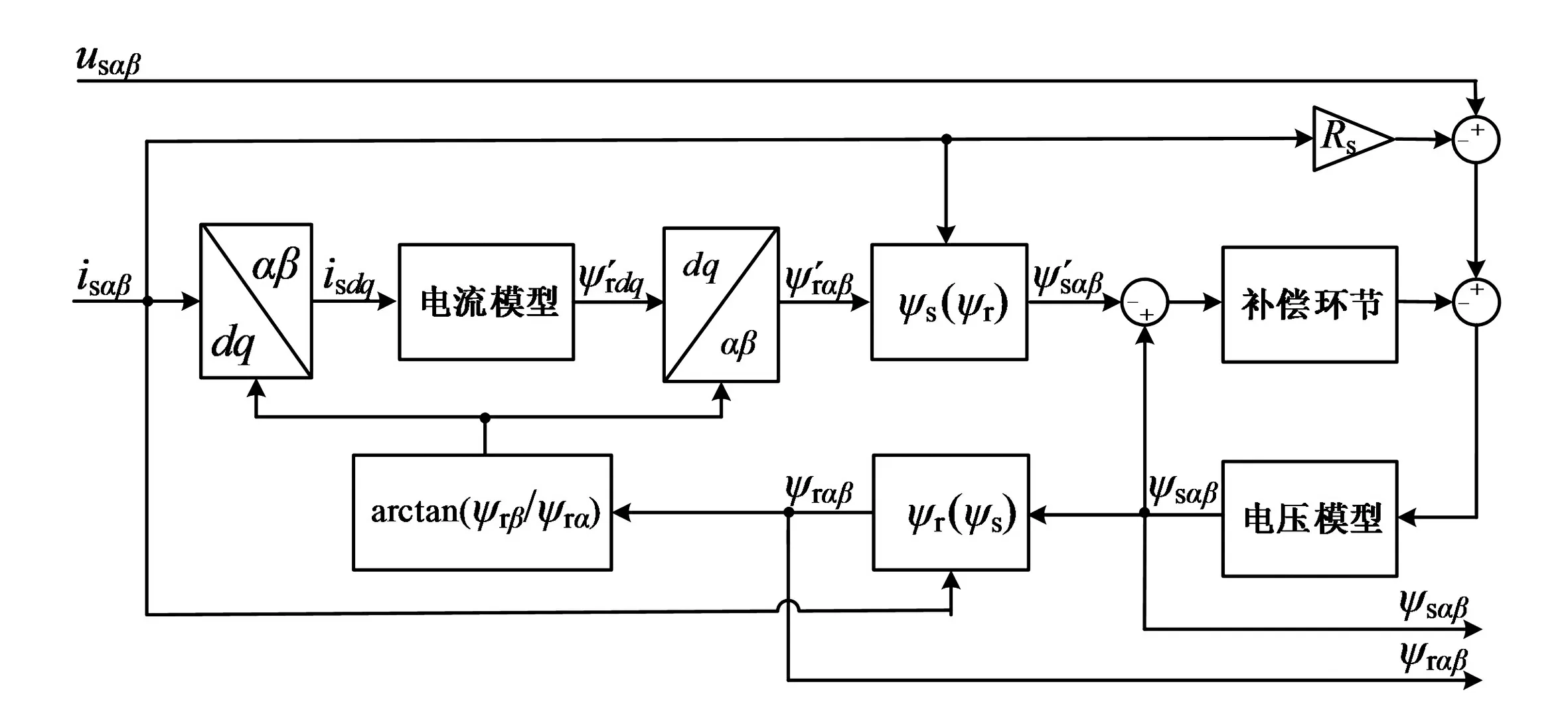
圖5 閉環轉子磁鏈觀測框圖
為驗證閉環轉子磁鏈的性能,所做測試如圖6所示,通過在us中加入直流量觀察不同的磁鏈模型的觀測波形,從結果可以看出閉環轉子磁鏈具有抑制直流偏置的性能.
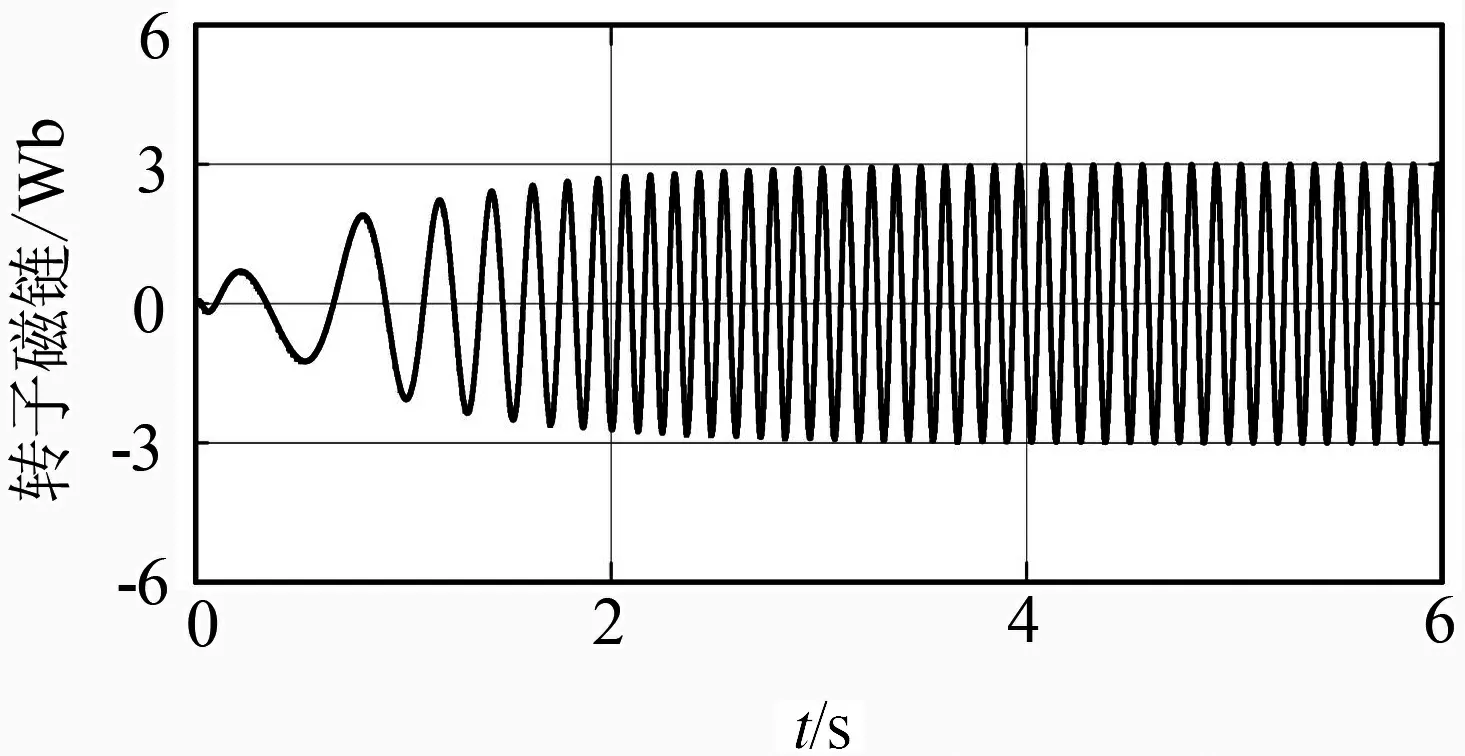
(a) 閉環轉子磁鏈模型觀測波形
(b) 電壓型轉子磁鏈模型觀測波形圖6 不同轉子磁鏈模型觀測波形對比
3.2 幅值歸一化
幅值歸一化方案原理框圖如圖7所示,為抑制輸入信號的幅值突變,有必要引入幅值歸一化環節,未驗證其性能, 所作測試如圖8所示.從測試結果,可以看出當復制歸一化環節有效地抑制了,輸入信號幅值突變對PLL估計性能的影響.
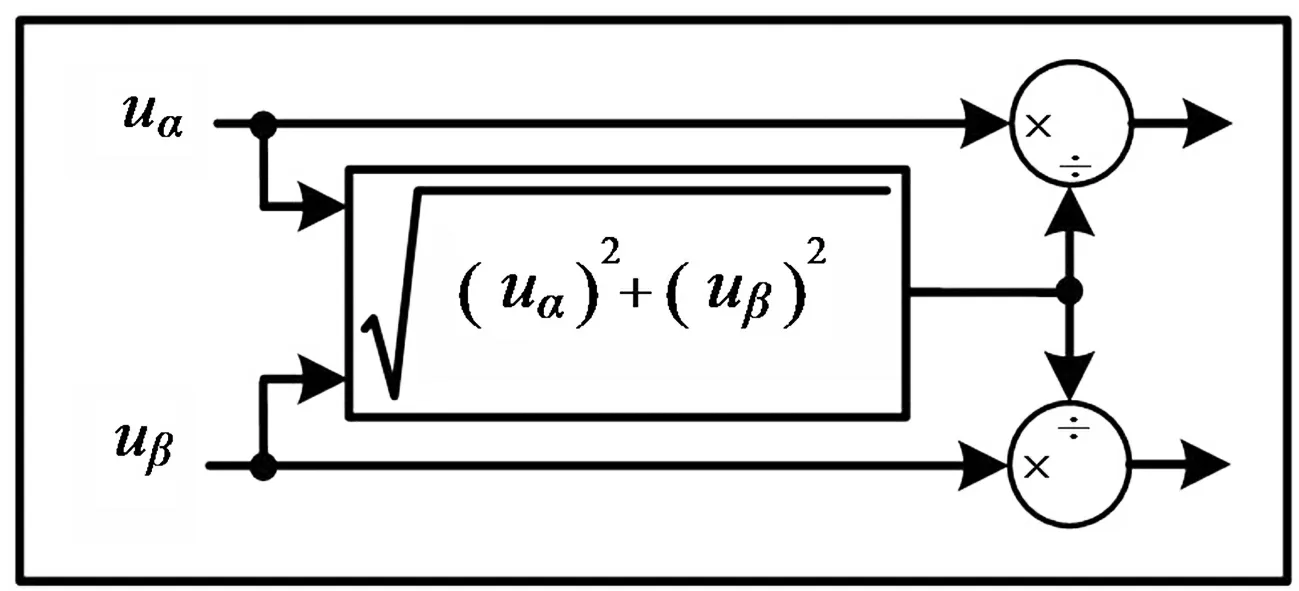
圖7 幅值歸一化方案原理框圖
(a) 輸入信號幅值突變
(b) 所測頻率波形圖8 引入幅值歸一化后PLL幅值突變影響測試
3.3 改進后的基于PLL的速度辨識算法
在引入閉環轉子磁鏈和幅值歸一化環節后,得到改進后的基于PLL的速度辨識算法框圖如圖9所示.
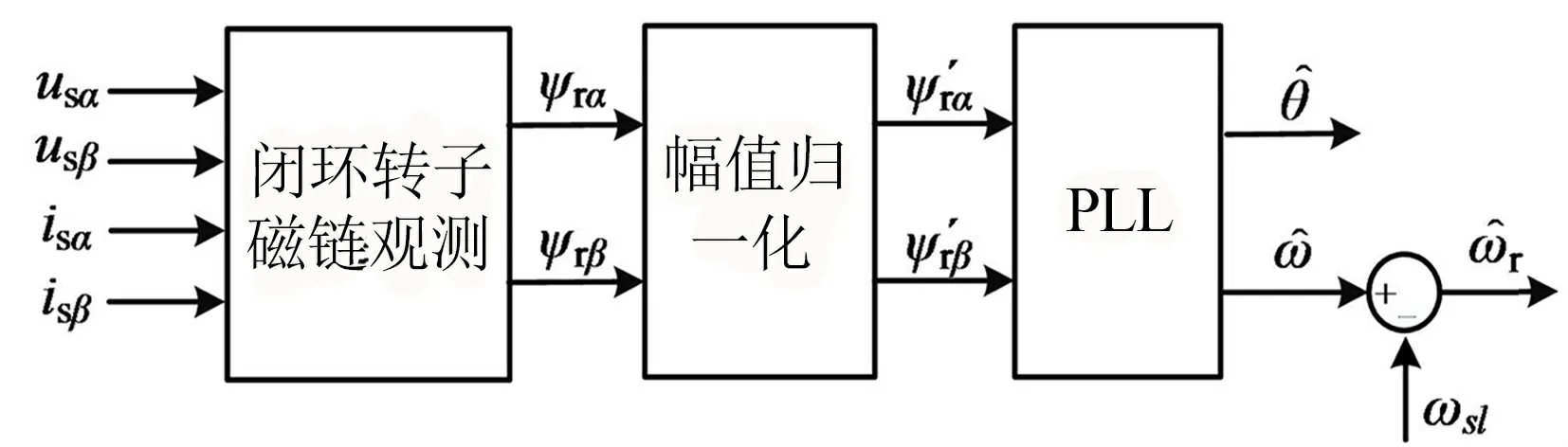
圖9 改進后的基于PLL的速度辨識算法框圖
4 仿真結果
為驗證圖9所示的速度辨識算法的性能,進行相應的仿真測試.選取的牽引電機參數:額定功率PN=562 kW,額定電壓UN=2 700 V,額定電流IN=145 A,額定轉速nN=4 100 r/min,定子電阻Rs=0.106 5 Ω,,轉子電阻Rr=0.066 3 Ω,定子電感Ls=0.054 92 H,轉子電感Lr=0.055 H,互感Lm=0.053 61 H.
為驗證算法的性能,所設計工況變化:①在恒定負載轉矩情況下,初始轉速由n=500 r/min突增為n=1 000 r/min再突降為n=500 r/min; ②在恒定轉速情況下,初始負載轉矩由TL=100 N·m突增為TL=500 N·m再突降為TL=100 N·m.
仿真結果如圖10、圖11所示,可以看出穩態時,辨識轉速誤差很小,當電機在恒定負載轉矩下,轉速突變時,辨識轉速能夠很好地跟蹤上實際轉速,在恒定轉速下,負載轉矩突變時,辨識轉速的波動較小,抗干擾能力較強.改進后的基于PLL的速度辨識算法具有較好的穩態及動態性能.
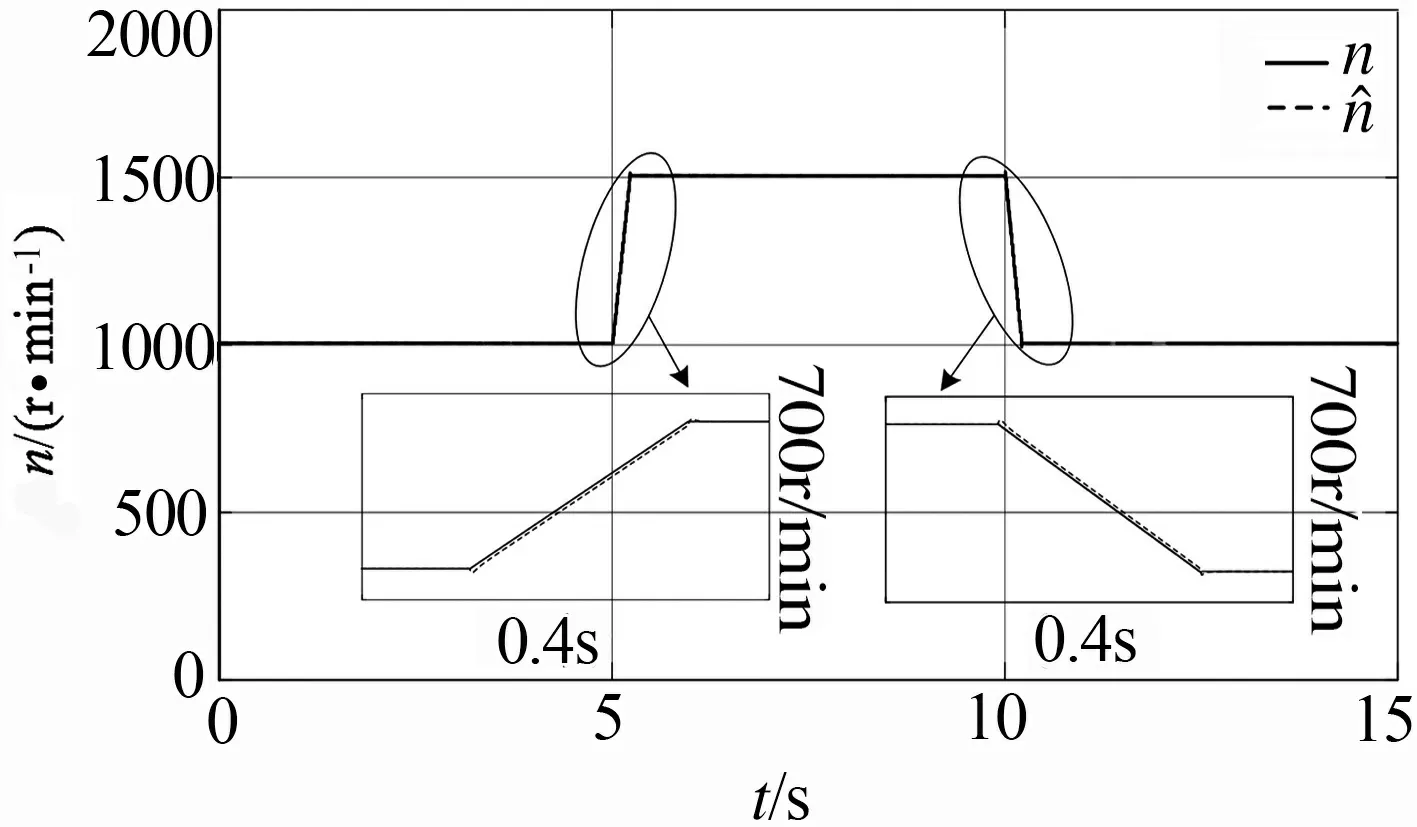
(a) 實際轉速和辨識轉速
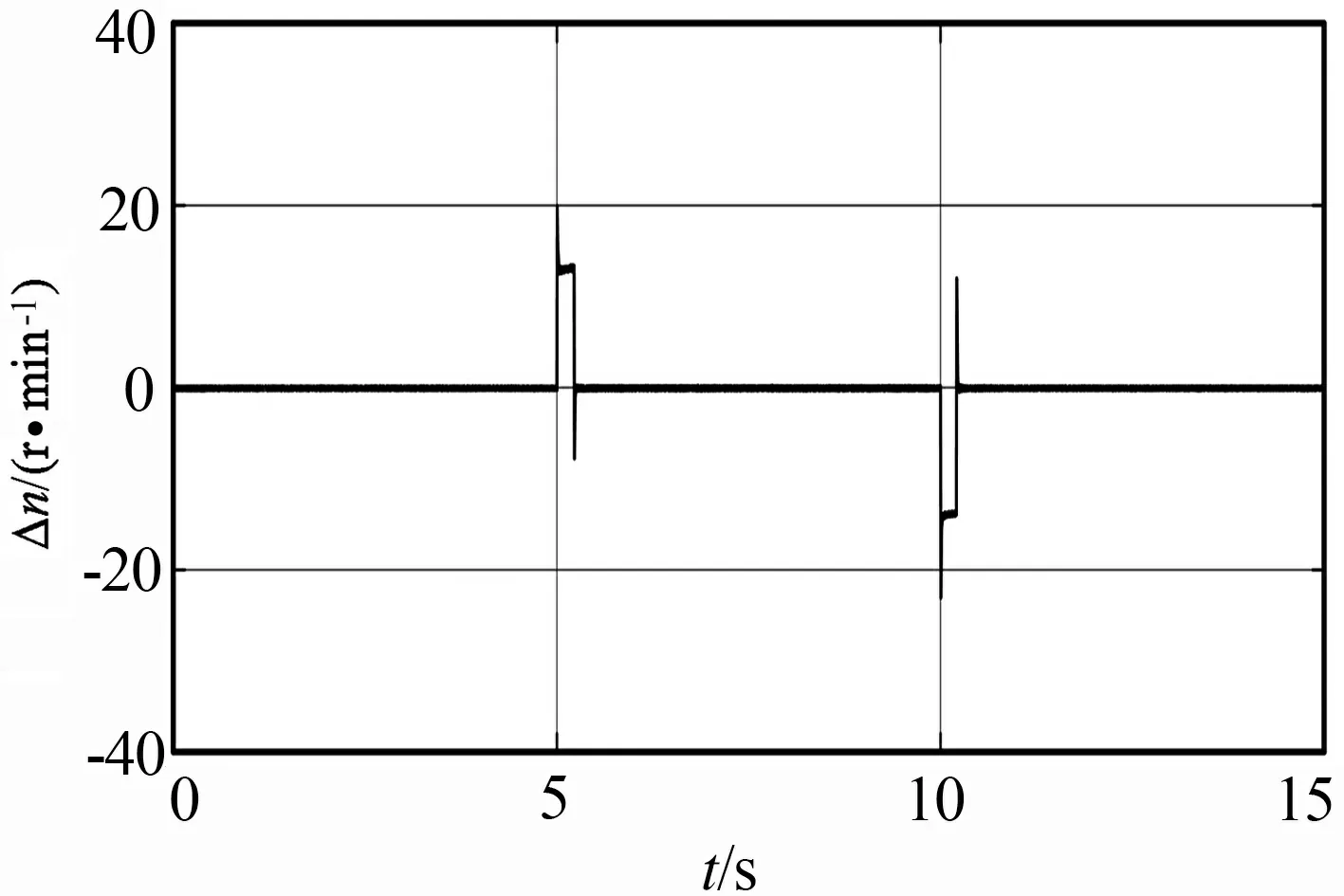
(b) 辨識轉速誤差圖10 恒定負載轉矩下,轉速突變仿真結果

(a) 實際轉速和辨識轉速
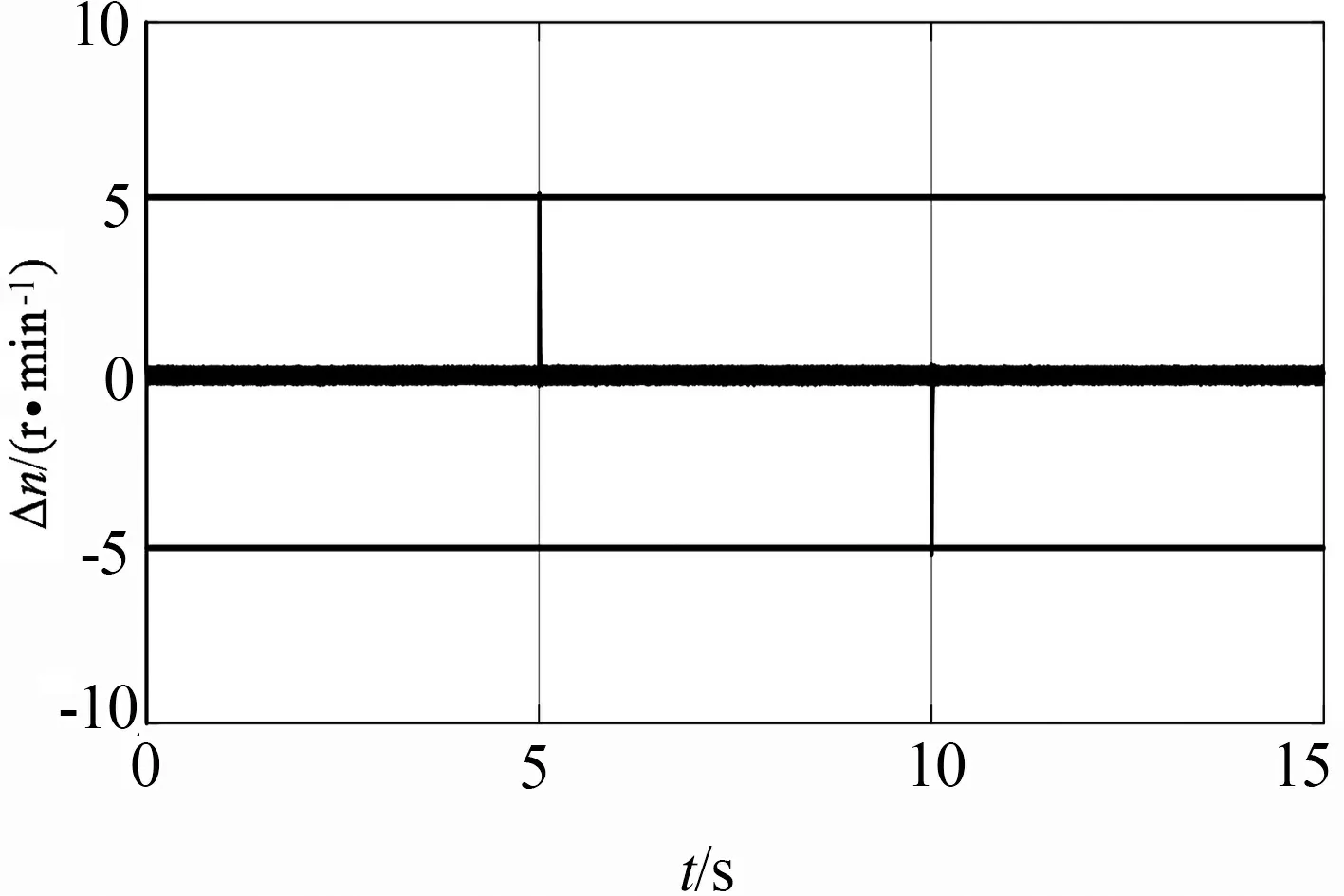
(b) 辨識轉速誤差圖11 恒定轉速下,負載轉矩突變仿真結果
5 結論
由于PLL本身有限的抗干擾性,本文在針對牽引傳動系統中可能出現的干擾研究了解決辦法,以提升基于PLL的速度辨識算法的抗干擾性能.通過閉環轉子磁鏈模型觀測轉子磁鏈抑制了可能出現的直流偏置,引入幅值歸一化環節抑制了可能出現的轉子磁鏈幅值波動.最后,通過仿真驗證了速度辨識算法在不同工況下的性能.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
