基于規(guī)則的船舶智能避碰決策關(guān)鍵技術(shù)分析
2021-08-02 09:53:38于宏波朱江江
中國科技縱橫 2021年9期
于宏波 朱江江
(中國人民解放軍91412部隊,廣東湛江 524002)
0.引言
避碰決策的迅速合理形成是保證船舶在會遇后依舊保持安全平穩(wěn)航行的重要手段,相應(yīng)決策模型與決策形成流程值得重點優(yōu)化。
1.基于規(guī)則的船舶智能避碰決策的理論分析
1.1 智能避碰特點及其流程設(shè)計
智能避碰主要實現(xiàn)在同一海區(qū)內(nèi)存在復(fù)數(shù)船只的條件下避碰,包括多船只之間碰撞危險的規(guī)避、兩船只相互碰撞危險的規(guī)避等。在現(xiàn)行的《國際海上避碰規(guī)則》中,對于兩船只會遇態(tài)勢、所承擔(dān)的責(zé)任進行了明確的設(shè)定,但是在多船只會遇方面僅僅提出了指導(dǎo)性意見。基于此,在多船只會遇問題的實際處理過程中,一般會將現(xiàn)行規(guī)則作為理論依據(jù)支持,按照其中的要求,辨識、判斷相應(yīng)規(guī)則中形成碰撞危險的多船只之間會遇態(tài)勢,對目標(biāo)船只可能做出的反應(yīng)、本船只在此次會遇中所處現(xiàn)實位置展開綜合性的分析,在此基礎(chǔ)上形成更具可操作性以及科學(xué)合理性的避碰方案。
在本次智能避碰決策的設(shè)計中,主要執(zhí)行以下流程:在信息感知單元,完成對本船只現(xiàn)階段真實航行狀態(tài)信息的感知、對附近目標(biāo)船只的現(xiàn)實航行狀態(tài)信息進行感知,并同時感知航行環(huán)境信息。在避碰決策規(guī)劃單元,綜合感知的信息內(nèi)容,實施參數(shù)計算以及危險程度評價;對船只會遇態(tài)勢落實精準劃分,同時判斷是否存在碰撞風(fēng)險,如果判斷不存在碰撞風(fēng)險,則直接跳轉(zhuǎn)至結(jié)束流程;如果判斷存在碰撞風(fēng)險,則立即啟動協(xié)調(diào)避讓機制(進入避碰方案確定單元)。在避碰方案確定單元,規(guī)劃避讓路徑,并在避讓后評價實際效果,引導(dǎo)船只復(fù)航,隨后轉(zhuǎn)入結(jié)束程序。
1.2 現(xiàn)行避碰方法及其問題
在當(dāng)前的船舶避碰實踐中,常用的決策方法主要有兩種,即“避碰重點船”決策方法以及“分布式”決策方法,具體如下:第一,“避碰重點船”決策方法。在發(fā)生多船只避碰情況時,確定避讓重點船只,并針對最危險的目標(biāo)設(shè)定避碰方案;判斷所形成的避碰方案是否會對其他船只造成威脅,如果是,則進行方案修正后再次轉(zhuǎn)入判斷程序;如果判斷不會對其他船只造成威脅,則啟動效果檢查程序,并判斷讓請否,如否,則進行方案修正后再次轉(zhuǎn)入判斷程序;若是,則轉(zhuǎn)入結(jié)束程序。第二,“分布式”決策方法。依托某種避讓協(xié)調(diào)機制的建立,促使避碰決策細化為多個分階段,并在所有分階段中確定出路船、決策方案,完成避碰、保證船舶正常通行[1]。綜合分析,現(xiàn)行避碰方法缺乏協(xié)同性,且存在著避讓責(zé)任缺失的問題,難以確保在避碰過程中所有船只均安全行駛,因此需要落實進一步優(yōu)化調(diào)整。
2.基于規(guī)則的船舶智能避碰決策的模型設(shè)計
2.1 協(xié)同學(xué)理論
在自然科學(xué)、社會科學(xué)的多領(lǐng)域中,協(xié)同學(xué)理論在當(dāng)前已然得到了廣泛應(yīng)用,主要以宏觀視角為切入點,研究系統(tǒng)由無序狀態(tài)轉(zhuǎn)變?yōu)橛行驙顟B(tài)的自組織過程。在初始階段,系統(tǒng)的最初狀態(tài)由所有子系統(tǒng)初始狀態(tài)的疊加所決定,而受到各個子系統(tǒng)在長時間發(fā)展中所產(chǎn)生的相互作用、制約作用或是競爭的影響,系統(tǒng)的功能結(jié)構(gòu)、空間狀態(tài)、時間狀態(tài)均對實現(xiàn)自組織演化,由此展現(xiàn)出系統(tǒng)的協(xié)同效應(yīng)以及自組織特性,促使系統(tǒng)轉(zhuǎn)入穩(wěn)定狀態(tài),且在功能結(jié)構(gòu)、空間狀態(tài)、時間狀態(tài)均有所更新。本次研究中,主要嘗試使用協(xié)同學(xué)理論解決多船只的避碰問題,為船舶避碰決策的形成提供新思路。在協(xié)同學(xué)理論的指導(dǎo)下,可以從宏觀角度入手,將所有系統(tǒng)視為多個子系統(tǒng),在特定條件下,受到相同作用原理協(xié)同,各個子系統(tǒng)實現(xiàn)有序運動,從而構(gòu)成一個新的、穩(wěn)定性更強的系統(tǒng)[2]。實踐中,設(shè)定某一海區(qū)的特定范圍內(nèi)存在船只數(shù)量為M,且這些船只能夠形成一個交通系統(tǒng),該海區(qū)范圍內(nèi)交通安全狀況可以通過該系統(tǒng)狀態(tài)向量進行反映。此時,該交通系統(tǒng)的狀態(tài)向量可以使用如下表達式進行表示,即:
在該表達式中,該交通系統(tǒng)的狀態(tài)向量使用q進行表達;該交通系統(tǒng)中船舶i的狀態(tài)向量使用qi進行表達;船舶i的位置向量使用x進行表達。
2.2 排隊論理論
排隊在日常生活中極為常見,而任何一個排隊系統(tǒng)均可以視為隨機服務(wù)系統(tǒng)。根據(jù)應(yīng)用領(lǐng)域的不同,排隊系統(tǒng)也存在著一定的差異性,但是其基本構(gòu)成表現(xiàn)出明顯的相似水平。通常來說,排隊系統(tǒng)主要包含著3個基本部分,包括服務(wù)機制、排隊與排隊規(guī)則、輸入過程。
將排隊論理論引入多船只避碰決策中具有極高的可行性,此時,可以設(shè)定排隊系統(tǒng)為正在相互靠近的船只、正在作出避碰決策的船只、多船只避碰決策模型。其中,所有還沒有生成碰撞危險依次等候的船只自然構(gòu)成一個行列,而等待避碰決策生成的船只行列可以視為“排隊”。基于排水系統(tǒng)的多船避碰決策模型中主要包含著三部分,即輸入(聚)、服務(wù)機構(gòu)以及輸出(散)。在該模型中,輸入(聚)主要代表著包含在該系統(tǒng)中船只的達到規(guī)律,依托構(gòu)成多船只會遇的船只數(shù)量總數(shù)、達到方式(單個到達、成批達到)、相機達到時間的間隔分布(船只達到時間規(guī)律)這三項內(nèi)容完成對船只達到該交通系統(tǒng)的規(guī)律作出表述。服務(wù)機構(gòu)主要代表著所使用的碰撞決策系統(tǒng),說明該排隊系統(tǒng)中服務(wù)臺數(shù)量、船只接受服務(wù)的形式。輸出(散)主要代表著海區(qū)范圍內(nèi)船只的安全駛離。
2.3 多階段避碰策略設(shè)計
結(jié)合前文的分析能夠了解,當(dāng)前所使用的船舶避碰決策方式存在著避讓責(zé)任缺失的問題,基于此,需要依托避碰梯度的設(shè)置形成包含優(yōu)先權(quán)的服務(wù)排隊規(guī)則,促使服務(wù)對象由單艘船只拓展至一類船舶。這種多階段避碰策略流程如下所示:對海區(qū)內(nèi)處于會遇態(tài)勢下的所有船只信息展開采集,確定兩個優(yōu)先集P1與P2中的船只對象;判斷P1中包含船只的總體數(shù)量,如果判斷數(shù)量為0,則作出保向保速決策;如果判斷數(shù)量為1,則代表兩船會遇;如果判斷數(shù)量不低于2,則對第一優(yōu)先級中船只的避碰路徑協(xié)同優(yōu)化;對避碰決策方案的有效性展開核實;實現(xiàn)船舶復(fù)航,再次返回確定兩個優(yōu)先集P1與P2中的船只對象這一步驟,直至?xí)雠鲎参C解除。
2.4 協(xié)同進化機制
前文對當(dāng)前所使用的船舶避碰決策方式的分析還發(fā)現(xiàn)其中存在著缺乏協(xié)同性的問題,基于此,需要引入?yún)f(xié)同進化機制完善多船只避碰決策模型。在本次研究中,主要應(yīng)用了多層編碼多種群遺傳算法完成船只避讓決策模型。實踐中,主要將單一的個體編碼由單層細化為多層,針對所有層級中的編碼對應(yīng)第一優(yōu)先級中一條船只的避碰決策方案;多船只避碰決策方案利用單個染色體進行整體性表達,以此體現(xiàn)出對船只避碰決策模型在船只數(shù)量方面限制的有效突破[3]。
依托多層編碼遺傳算法編碼技術(shù)完成個體編碼后,實施種群初始化,其限定條件具體如下:
隨后,要搭建起適應(yīng)度函數(shù),區(qū)分種群中不同個體的優(yōu)劣性,實現(xiàn)最優(yōu)解的獲取。在多船只避碰決策模型中,設(shè)定所有船只均實施單次轉(zhuǎn)向,則依托航線航程、船只安全程度作為構(gòu)建適應(yīng)度函數(shù)的評價指標(biāo),則有:
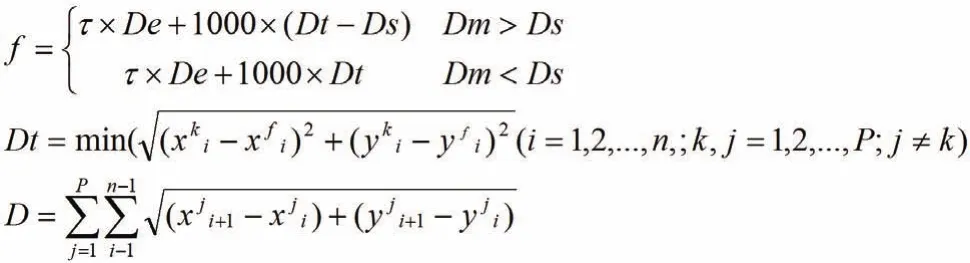
其中,所有船只的運行軌跡坐標(biāo)為(xji,yji);第一優(yōu)先級中船只的總數(shù)為N;船只之間的會遇距離最小值為De;船只路徑長度為D;船只領(lǐng)域半徑為Ds;權(quán)重系數(shù)為τ。
3.總結(jié)
現(xiàn)行避碰方法缺乏協(xié)同性,且存在著避讓責(zé)任缺失的問題,難以確保在避碰過程中所有船只均安全行駛,因此需要落實進一步優(yōu)化調(diào)整。通過融合協(xié)同學(xué)理論、排隊論理論、多階段避碰策略設(shè)計以及協(xié)同進化機制,能夠形成一種基于規(guī)則的船舶智能避碰決策的模型,為多船舶避碰問題的高效決策處理提供了新思路。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45