基于遙測數據分析的無人機故障診斷系統設計
2021-08-04 08:36:52陳曉飛
計算機測量與控制 2021年7期
陳曉飛,賈 勇,韓 芳
(新疆工程學院 信息工程學院,烏魯木齊 830023)
0 引言
近年來,無人機技術發展與研究取得了較大的成就。無人機控制技術,基于無線網絡傳輸技術、遠程控制技術,通過遠程指令數據交互與飛行狀態數據的實時交互,完成對無人機飛行狀態數據的收集與飛行姿態的控制。受到無人機應用場景不同[1]與外界氣候影響[2],無人機在飛行過程中會出現不同的故障,根據故障類型可分為硬件故障、軟件故障與控制故障。為了實時了解無人機飛行狀態,無人機控制系統下會獨立存在一個無人機故障診斷系統,其作用在于對無人機飛行過程中的數據進行收集、反饋、分析,通過分析飛行數據,對故障原因進行診斷。但是,現有的故障診斷系統數據來源基于無人機數據采集傳感器,因此一旦與傳感器相關器件損壞,系統就無法對飛行數據進行收集,無法做出故障信號診斷。針對此種問題,引入遙測數據分析技術替代故障數據收集傳感器,根據遙測數據分析機制與計算方法,提出基于遙測數據分析的無人機故障診斷系統,并設計仿真實驗驗證提出系統的有效性。
1 無人機故障遙測診斷系統設計
由無人機結構特征可知,無人機在飛行過程中,主要工作單元分為控制單元、驅動單元與數據傳輸單元三部分構成,其中控制單元由控制電路、主控與相關指令處理器件構成;驅動單元由電機、傳動器及相關驅動器件構成;數據傳輸單元由存儲器與一些數據轉存、寄存器件以及數據信號收發器件構成;因此在飛行過程中無論哪一單元出現功能異常,都會影響無人機的正常飛行。針對當下無人機控制技術是通過多組件間的無線數據傳輸、無線數據分析、無線數據執行三部分構成,根據無線數據處理特點,多數據在無線處理過程中,會產生數據控制的耦合作用[3],耦合作用達到一定值時,上述3個單元中的任意器件就會出現異常,觸發無人機上的故障傳感器,對耦合點進行故障反饋,完成對故障的診斷。但是,當故障耦合點發生在故障傳感器結構區時,傳感器反饋數據產生的數據耦合與故障點耦合形成交叉耦合,即輸入數據與輸出數據在變量轉換過程中出現交叉誤差系數,診斷量無法對交叉誤差系數做出判定,導致診斷失敗。
基于上述特點,引入遙測數據分析理念[4],通過在無人機各功能單元加入遙測數據采集點,通過遙測衛星實時接收無人機狀態數據,通過地面控制系統,將各遙測數據采集點上報數據進行遠分離診斷,解決無人機故障傳感器故障帶來的診斷失敗問題。通過地面遙測數據采集平臺,實現對無人機故障遙測數據的實時采集與分析。無人機故障遙測診斷系統工作原理,如圖1所示。
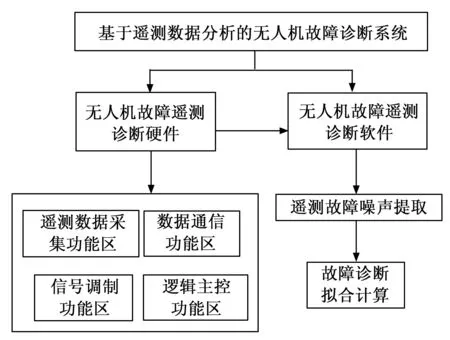
圖1 無人機故障遙測診斷系統工作原理
如圖1所示,無人機故障遙測診斷系統硬件包括遙測數據采集功能區、信號調制功能區、數據通信功能區及邏輯主控功能區;系統軟件通過提取遙測故障噪聲實現無人機遙測故障解析,通過擬合計算實現無人機故障信號診斷。
2 基于遙測數據分析的無人機故障診斷硬件設計
根據設計系統的工作原理,對設計系統的硬件部分進行設計。硬件共分為4部分,分別為遙測數據采集功能區、信號調制功能區、數據通信功能區、邏輯主控功能區,下面對各功能區硬件進行詳細分析。
(1)遙測數據采集功能區內部主要采用KJF-34GS前置遙測信號收發基帶板卡作為此功能區無人機故障數據的采集卡,支持MSD/TPC編譯碼功能,CPCI結構[5]設計,可兼容接收PCM-FM、PCM-BPSK、PCM-QPSK和PCM-CDMA-BPSK等多種調制體制的遙測信號,可擴展接收新體制信號,具有良好的通用性;信息傳輸速率為20 Mbps;多頻段L/S;
采用左右旋極化分集合成技術:當兩路信號信噪比相等時,可獲得優于2.5 dB的增益;
具有時碼器功能,能接收并轉發IRIG-B000時間碼信號[6],為系統提供遙測時間基準;
具有PCM模擬器功能,可輸出模擬PCM信號完成系統自檢功能;
輸入接口支持:中頻信號(接收機)(SMA),外部PCM信號(PCM)(CPCI)具有位同步、幀同步、副幀同步狀態指示AGC動態范圍:≥20 dBl 解調體制:PCM-FM、PCM-BPSK/QPSK、PCM-CDMA-BPSK/QPSKl 中頻帶寬:50 kHz~20 MHz/自動;碼型:NRZ-L/M/S,Bi¢-L/M/S,RNRZ-L加解密接口:DB-15;l 綜合數據接口:DB-25。工作電壓:12 V±10%l 。
同時在功能區內獨立配備寬域電源管理器與電路傳感器,保障故障數據采集狀態的穩定。
(2)信號調制功能區內設有Anaren公司[7]生產的X3DC08E2S信號調制器,通過內建射頻通信通道,將故障數據進行862~894 MHz模量轉換,有效屏蔽冗余數據信號的擾動;為了保證信號調制效果的穩定,在信號調制器前端設計了SBB-5089Z信號方法器與TPD8F003DQDR濾波器作為故障數據信號調制的增益處理模塊。通過放大、濾波處理,使載入信號調制器的數據信號滿足以下指標:調制終止射頻頻率200 MHz;輸出電阻值100 Ω;信號放大范圍1 GHz;編碼形式SMD/SMT。
(3)數據通信功能區負責調制信號的地面診斷系統軟件層面信號與指令信號的收發。采用AT89C51RC2-SLSUM通信模塊,通過自帶多模信道,支持6路并發技術,通過獨立信號線連接,支持將模量射頻信號轉換為網絡數字信號,通過對信號電路的調理,完成信號編碼轉換,數據傳輸信號轉換電路,如圖2所示。
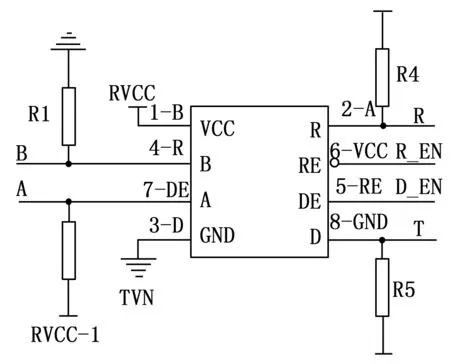
圖2 AT89C51RC2-SLSUM通信模塊信號轉換工作電路圖
在該電路圖中,有4路數據信號為數字信號輸出量、2路射頻輸出模量以及2路4位模量轉換補償信號,可保障數據在網絡數字信道中6路并發的穩定。
(4)邏輯主控功能區為設計硬件的核心功能區,采用AMR架構的x86平臺處理器,通過I7-10700處理器的八核芯16線程,穩定保證多因素故障數據的分析處理,同時兼顧控制、分析、調度等多任務處理的資源調度。動態主頻高達5.1 GHz,能夠滿足多數據流下復雜故障的處理,集成指令集SSE4.1/4.2,AVX2,64 bit,為硬件平臺的設計提供核心保障。
3 軟件部分設計
針對遙測故障采集數據的分析策略與故障信息的診斷算法,系統在軟件層面設計上進行了針對性優化設計,通過針對性設計實現與硬件性能的高度適配。
3.1 遙測故障噪聲提取策略
在遙測采集的無人機飛行故障信息中,受到諸多不可控因素的影響以及電磁信號等干擾源擾動,故障信息流中夾雜著大量擾動噪聲,雖然不同變量位置的噪聲對無人機故障分析精準度的影響有所不同,但不可否認噪聲的存在無疑會降低無人機故障信號診斷結果的精度。因此,需要對遙測數據信號中的噪聲進行提取,通過噪聲提取獲得一個數據信號波分布均勻的遙測故障模型。
為了減輕設計系統的運算壓力,噪聲提取任務設計采用策略設計的方式,將噪聲變量與提取邏輯以策略的形式通過Matlab環境工具編輯到軟件底層,使其具有獨立的調用權限,保證任務運行的穩定,具體操作如下:
在Matlab環境工具中創建變量工具窗口,在窗口中選擇小波變量設計工具,在恐懼中輸入無人機遙測飛行數據,創建無人機飛行數據場景,在場景中會得到一組有飛行數據生成的解析波,其中包含著無人機飛行狀態、故障位置、故障類型以及噪聲。在小波工具窗口輸入Audio track命令,打開解析波編輯界面,在編輯界面中會對解析波進行噪聲的小波過濾,噪聲維度調節設定等變量處理,設計系統中的噪聲提取處理的變量設計如下:
(1)根據無人機遙測數據生成無人機飛行狀態解析波,狀態數據中設定無人機的飛行高度為X,對應X時域的故障數據設定為噪聲提取目標;
(2)由完成一次飛行狀態解析波的小波濾波,在濾波后的解析波正交基上,會發現波形十分平滑,根據飛行正常態波與故障波之間的正則性,對解析波進行一次重組;
(3)將重組后解析波上db小波[8]的階數I設為1,解析次數設定為5,執行得到解析結果,如圖3所示;
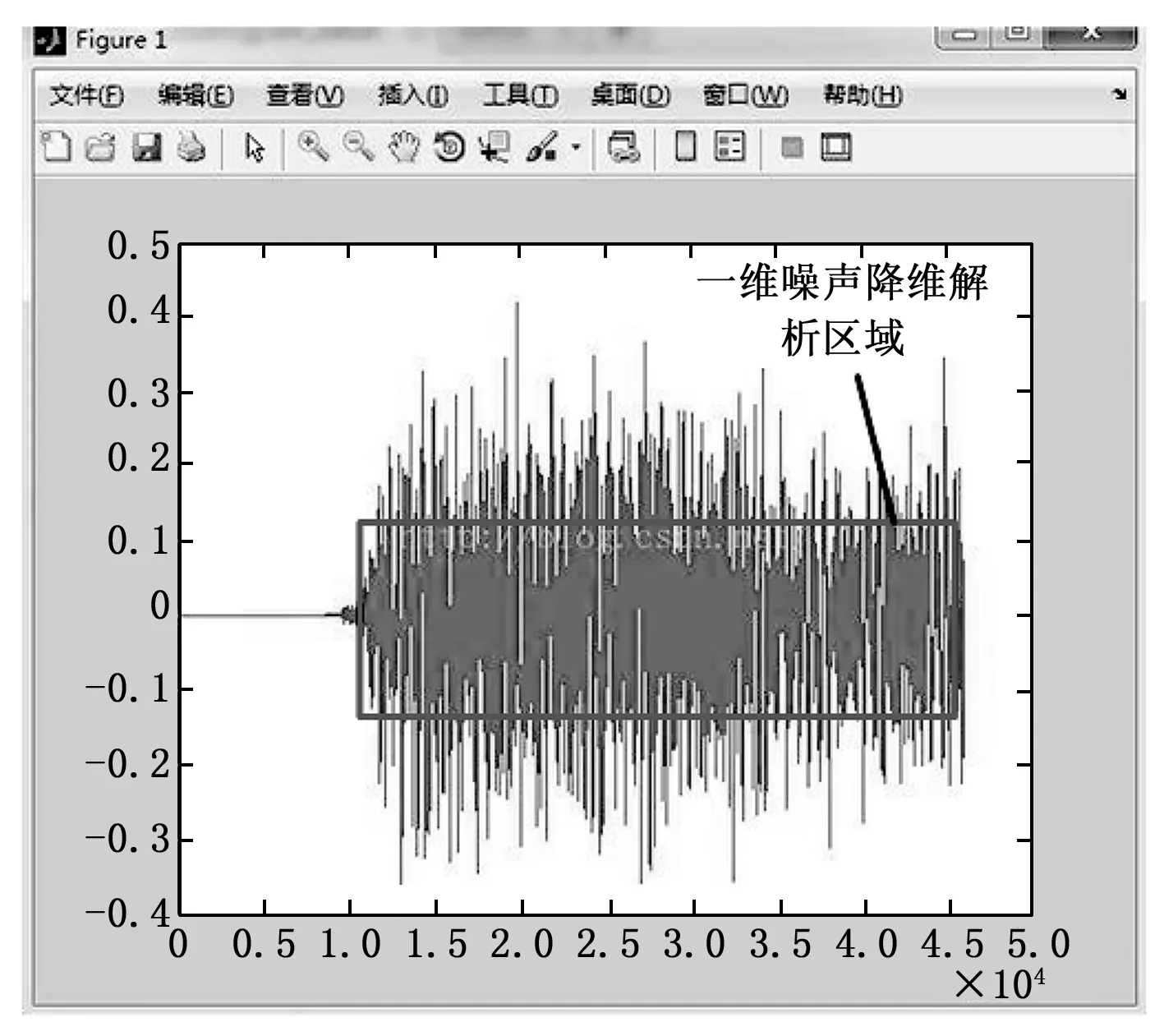
圖3 無人機遙測故障解析波降維解析結果
(4)對解析結果進行信號降維,打開噪聲工具窗口,輸入噪聲波范圍,設計中將噪聲提取范圍設定為4,執行得到提取噪聲后的無人機遙測故障解析波,如圖4所示。

圖4 提取噪聲后的無人機遙測故障解析波
3.2 多因素遙測數據分析下故障診斷擬合計算
對提取噪聲后的解析波進行故障信號診斷判定計算。針對遙測故障解析波當前時域狀態包含多因素特征,采用曲線擬合判斷方式,對解析波故障數據點進行擬合診斷,通過曲線擬合判定計算,使判定結果無限逼近精準值,通過最小二乘法計算,優化診斷判定結果,得到判定結果的最小值。具體計算步驟如下:
設定擬態因素要件:C1,C2,…,Cz與u1,u2,…,uz對其進行函數求解計算。
(1)

(1)當γ(C)為單一要素診斷函數時,解析函數的曲線形態與擬合診斷判定曲線形態一致[9]。
(2)當γ(C)為多要素診斷函數時,其最小二程計算值必須處于擬合診斷判定曲線之上。
(3)對故障擬合函數判定:{γ0(C),γ0(C),…,γ0(C)}由遙測故障數據中故障波密集分布形態確定[10]。
對抽取的故障擬態要件(cn,un)(n=1,2,…,i)進行多因素z(zi)的擬態診斷判定函數表達,即:
hz(C)=s0+s1c+s2c2+…+szcz
(2)
將多因素故障擬合要件與(cn,un)(n=1,2,…,i)進行擬合函數關聯判定,得到擬合后的函數診斷式為:
(3)

(4)
進一步換量計算,得到故障擬合診斷判斷式:
(5)
綜上可知,無人機故障診斷系統軟件流程圖如圖5所示。

圖5 提取噪聲后的無人機遙測故障解析波
如圖5所示,軟件部分首先設定時域故障數據為噪聲提取目標,通過小波濾波對解析波進行一次重組,設定噪聲波范圍為4,執行得到提取噪聲后的無人機遙測故障解析波;再通過曲線擬合的判斷方式得到故障擬合診斷判斷式,將其傳輸至硬件模塊,實現基于遙測數據分析的無人機故障診斷系統設計。
4 系統調試
為了驗證基于遙測數據分析的無人機故障診斷系統設計合理性,對設計系統進行軟件故障、硬件故障、控制故障3個維度的系統調試。
4.1 調試數據采集
調試數據來源于HT-1遙感衛星;無人機采用搭載遙測故障采集傳感器的測試機;診斷系統分別為設計系統與傳統診斷系統;測試環境數據如表1所示。
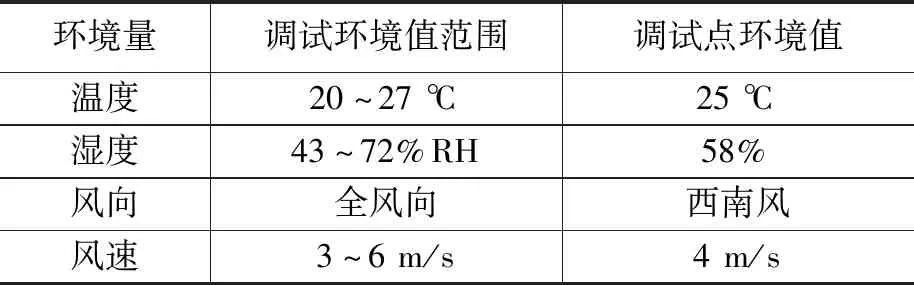
表1 采集數據標準
4.2 軟件故障信號診斷
將調試無人機所反饋帶有軟件故障的遙測數據信號波,導入設計系統,如圖6所示,生成故障診斷曲線如圖7所示,并根據曲線分布結果,進行調試總結。
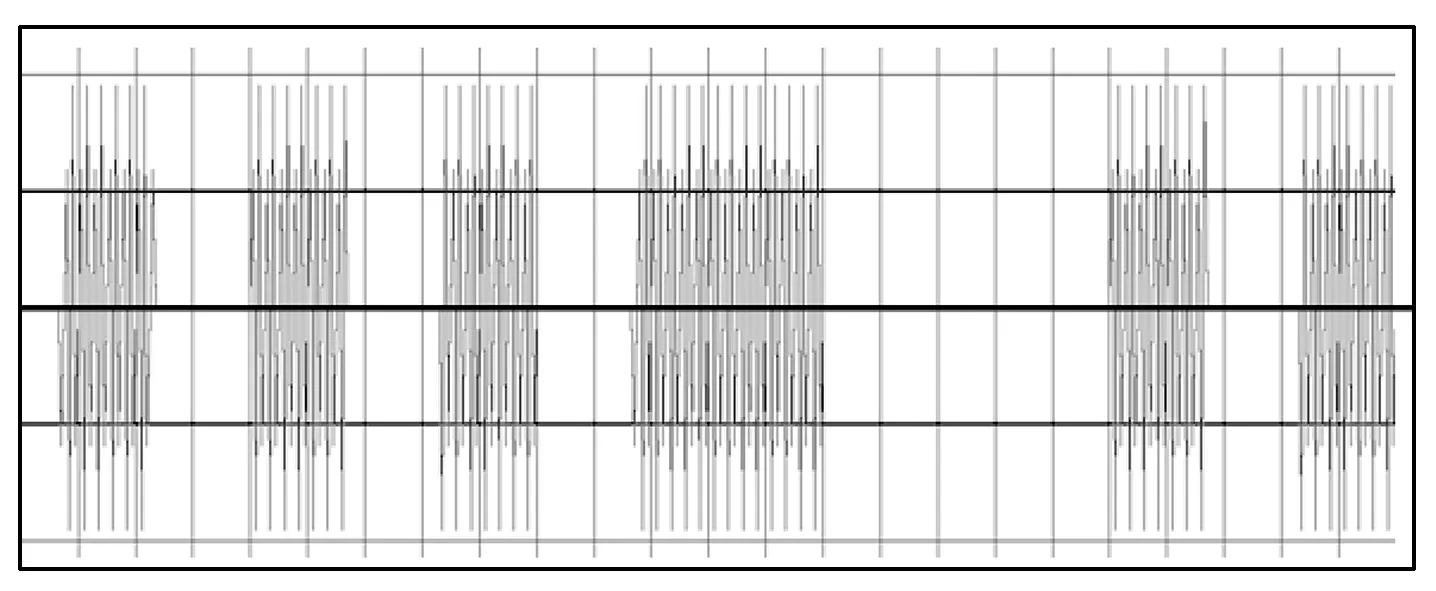
圖6 帶有軟件故障的無人機遙測數據信號波
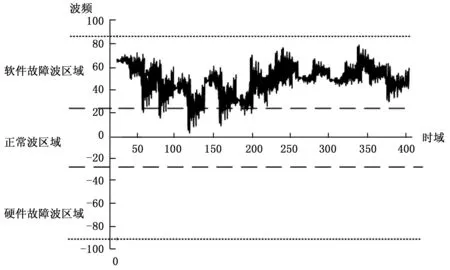
圖7 故障診斷曲線
由圖7中診斷曲線分布區域可知,設計診斷系統準確的對調試故障數據作出了軟件故障的診斷判定,證明設計系統對無人機軟件故障的診斷效果滿足技術標準。
4.3 硬件故障信號診斷
將調試無人機所反饋帶有硬件故障的遙測數據信號波導入設計系統,如圖8所示,生成故障診斷曲線如圖9所示,并根據曲線分布結果,進行調試總結。
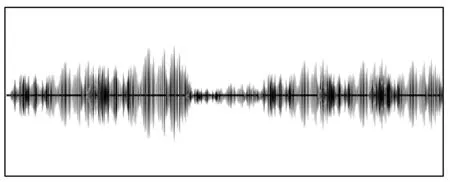
圖8 帶有硬件故障的無人機遙測數據信號波
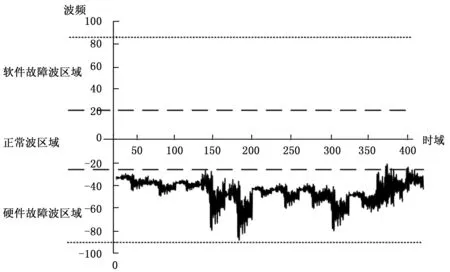
圖9 故障診斷曲線
由圖9中診斷曲線分布區域可知,設計診斷系統準確地對調試故障數據做出了硬件故障的診斷判定,證明設計系統對無人機軟件故障的診斷效果滿足技術標準。
4.4 控制故障信號診斷
將調試無人機所反饋帶有控制故障(信號故障)的遙測數據信號波導入設計系統,如圖10所示,生成故障診斷曲線,如圖11所示,并根據曲線分布結果,進行調試總結。
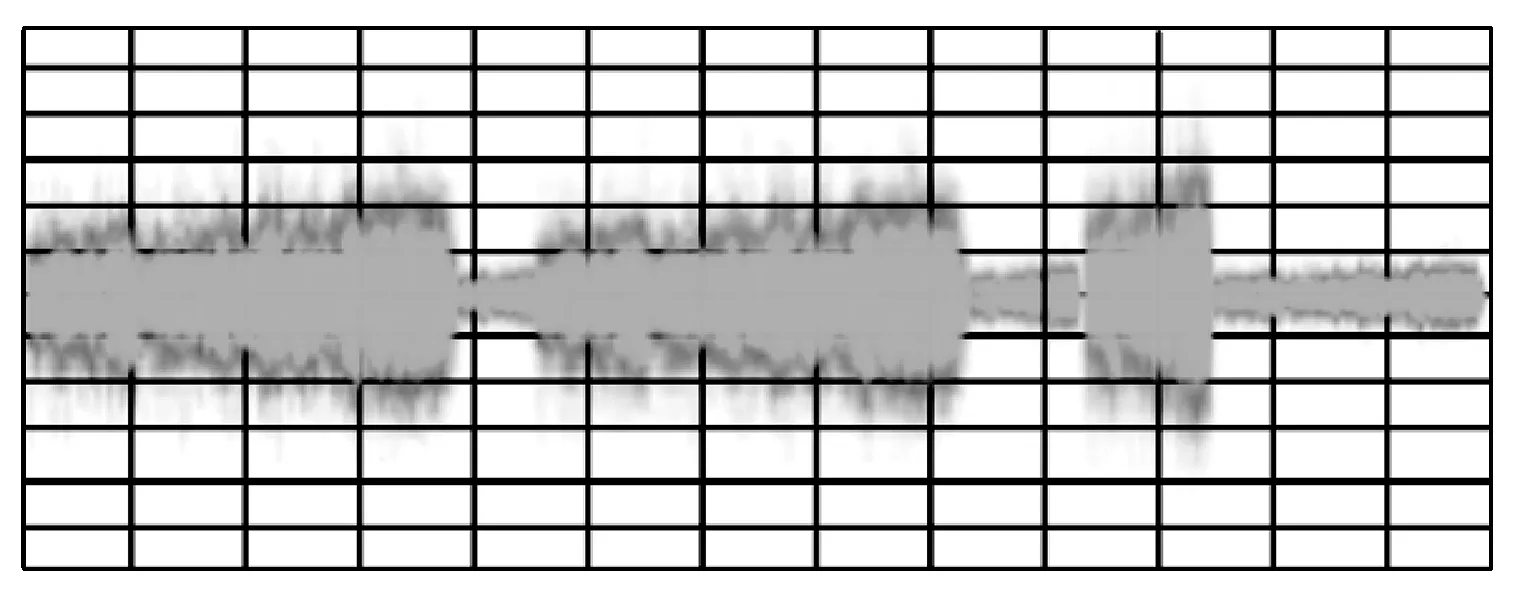
圖10 帶有控制故障的無人機遙測數據信號波
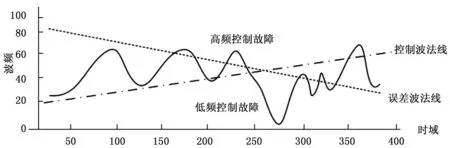
圖11 故障診斷曲線
由圖11中診斷曲線分布區域可知,設計診斷系統能夠根據控制參量與誤差參量,通過最小二乘法生成兩條診斷法線,并對法線之外的高頻與低頻區域的故障波進行診斷判定,可以證明設計系統對無人機控制故障的診斷效果滿足技術標準。
4.5 故障數據統計分析
將上述3個調試維度的調試數據進行整合統計分析,3個維度故障診斷數據的整合采用大數據融合技術,根據診斷精度與調試次數比同調試總次數間的最佳診斷比進行融合統計,統計表詳見表2所示。

表2 設計系統無人機故障診斷綜合性能
在表2數據的統計過程中,軟件故障調試數據與硬件故障調試數據的解析波采用橫波形態,主要在于兩種調試數據設定中不含有相對數據存在,因此在波形表現上橫波可以滿足調試數據收集分析的需要;而控制故障調試數據包含了硬件區域與軟件區域的控制信息,在橫波上會同時涉及兩種故障波區域,無法有效收集所需信息,而在縱波上受到時頻空間不同的影響,在縱波上只會呈現控制信號的噪聲波,即故障波,因此控制故障調試數據采用縱波解析波完成。
根據表2中的數據可知,提出設計的基于遙測數據分析的無人機故障診斷系統,不論在軟件維度還是在硬件維度,都能對故障做出精準的診斷,表現效果令人滿意。同時,系統對涉及軟硬件雙重維度的第三維度——控制維度故障診斷結果,也達到了預期效果。通過對3個維度調試過程的100次重復數據綜合統計表明,基于遙測數據分析的無人機故障診斷系統,能夠穩定、高效、準確地對無人機故障做出診斷,解決傳統診斷系統硬件維度上故障診斷失敗的問題。
5 結束語
遠程控制技術、網絡技術與無人機控制技術的發展,使無人機快速應用于諸多領域。針對無人機故障診斷系統在當下應用場景中存在的問題。設計在硬件與軟件層面進行了全新的設計。設計基于遙測數據分析技術,通過對無人機硬件故障、軟件故障與控制故障3個維度的數據分析,總結不同維度下故障的特性與共性,通過調試實例數據表明,提出設計系統能夠在不同故障維度場景中,高效、穩定、準確的作出診斷。設計系統具有較高推廣性與應用性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
汽車維護與修理(2016年10期)2016-07-10 08:17:41
當代化工研究(2016年6期)2016-03-20 16:21:46
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21