基于手動測試硬件的BUS OFF自動化測試解決方案
2021-08-05 06:37:24李林澤黃祖朋謝佶宏
汽車實用技術 2021年14期
關鍵詞:汽車
李林澤,孟 鑫,徐 嫚,黃祖朋,謝佶宏,邵 杰
(上汽通用五菱汽車股份有限公司,廣西 柳州 545007)
引言
科學技術的發展帶動了汽車電子技術的進步,其在汽車行業中得到了廣泛應用,使汽車操作更為安全、穩定。CAN網絡是汽車普遍使用的一種通信技術,在系統內汽車能夠接收不同的數據信息,以及發送數據信息,CAN 網絡推動了汽車計算機網絡走向了更高的發展領域[1]。隨著新能源汽車的崛起,越來越多的新功能、新科技搭載在新能源汽車上,從而導致上 CAN節點增多。各主機廠為了管理數量龐大的CAN節點,會根據ISO 11898及ISO 11595標準協議制定更符合整車項目的 CAN通訊策略來管控 CAN網絡上的各節點。為了保證零部件廠商開發出的上 CAN節點軟件及硬件能夠滿足主機廠的CAN通訊策略,需要對CAN節點進行零件級、系統級、整車級三項 CAN網絡測試。為了更好地完成這項工作,本文結合工作實踐經驗,提出了一種新的測試方案,該方案具有搭載簡單、操作簡單、拓展性強、可自動化等優點,不僅解放人力和物力上的投入,大大減少測試周期,提高效率,降低成本,而且使測試更加規范化、標準化,減少由于人為的操作失誤引起的錯誤結果[2]。
1 BUS OFF簡介
CAN總線的協議規定,ECU在總線上發送報文,若出現發不出去的情況,ECU會立刻嘗試重新發送,當連續255次無法發送,ECU自己進入總線關閉模式,即BUS OFF,該狀態下,ECU是無法發送報文的。ECU在自己內部檢測到BUS OFF后,從邏輯上退出了總線,暫時不影響其他節點通訊,由于ECU自身也不明白是什么原因導致BUS OFF,于是在內部記錄“xx年xx月xx日xx時xx分xx秒,汽車電量、里程、xx是多少”,“我”BUSOFF了,即故障診斷。然后ECU開始計時,達到特定時間后,重啟自身的CAN模塊,這一套具體的恢復規則,即故障恢復機制。
2 測試方案系統搭建
以零件級測試為例,如表1所示,所述系統包括:并聯在雙絞線即 CAN總線上的一個以上的 CAN節點和型號為VH6501的CAN總線干擾儀、供電的電源及開關,通過USB線與CAN總線干擾儀相連的安裝了CANoe軟件的上位機。
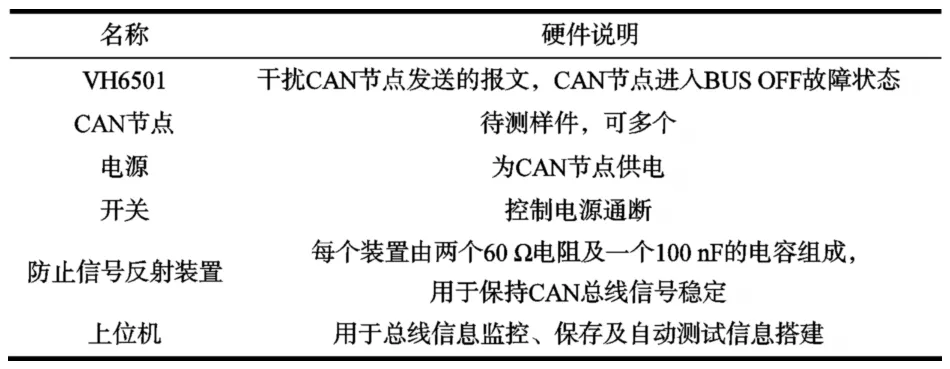
表1 硬件單元表
若為整車級測試,電源、開關替換為整車KL30電源,CAN節點替換為整車節點,即CAN總線干擾儀直接接入整車CAN網段。
以零件級測試舉例說明,連接方式如圖1所示,CAN節點是連接在 CAN總線上的電子設備,如汽車上的車身控制器、防制動抱死控制器和電機控制器等。CAN節點的數量可以是一個,也可以是多個,并且可以同時對多個 CAN節點進行故障檢測。因此,為了提高檢測效率,一般會設置多個CAN節點。
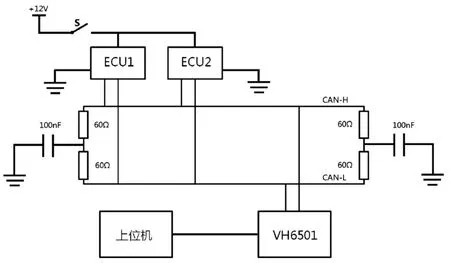
圖1 硬件連接圖
電源是為 CAN節點工作供電的,一般采用穩壓電源。開關用來控制電源供電的通斷,串聯在電源正極和 CAN節點之間。
CAN總線干擾儀連接在 CAN總線上,通過干擾 CAN節點發送的報文數據中的特定的位或者特定位的特定長度(最小6.25 ns),如某個位是“1”的,將其干擾為“0”,實現其干擾功能。通過驗證 CAN節點發送錯誤數據所處的狀態(主動錯誤狀態、被動錯誤狀態、總線關閉Bus Off狀態)、采樣點位置是否符合規范定義判斷其受干擾情況。CAN總線干擾儀可采用德國Vector公司生產的VH6501。VH6501的前身CANstress是Vector早期針對傳統CAN的總線干擾儀產品,只有干擾功能,不能同時監控總線上的CAN報文數據,如果采用CANstress進行Bus Off故障檢測,還需要設置一個CAN報文監控設備。由于干擾設備與監控設備分離,使CANstress對一個CAN節點實施干擾后,需重新進行干擾配置才能對其它CAN節點實施干擾。VH6501是新一代總線干擾儀,在CANstress的功能上進行了升級和擴展。一方面,VH6501可用作干擾儀,在上位機上導入事先編寫好的軟件腳本、DBC數據庫,然后打開軟件腳本相關的panel工具,輸入待測試 CAN節點,發送干擾信號對報文進行干擾;另一方面,VH6501可在上位機的CANoe軟件控制下,監控總線上的CAN報文數據,生成記錄文件(Trace文件)。
3 測試方案系統軟件實現
如上所述,VH6501要實現干擾,需要導入事先編寫好的軟件腳本、DBC數據庫,然后打開軟件腳本相關的panel工具,其中軟件腳本是本測試方案系統的主要軟件部分。沒有腳本就無法驅動 VH6501,它不像 CANstress有個專屬的APP去操控,所以通過編寫CANoe腳本,包括操作界面設計,即可實現操作的邏輯(干擾模式、干擾報文信息、運行、停止、保存等等),再導入數據庫,結合調用干擾報文相關的函數并設置循環,即可實現自動化測試甚至自動化解析。具體操作流程為:連接VH6501硬件,在CANoe總線仿真界面創建VH6501的仿真節點,從仿真節點進入CANoe軟件自帶的腳本編輯器CAPL Browser,也可以導入編寫好的腳本。腳本使用CALP語言編寫,協議中有相關函數直接調用來配置干擾模式及作出干擾動作,然后還要使用CANoe內部的panl設計工具設計一款對應腳本軟件的人機交互界面,使用環境變量將腳本代碼和界面關聯起來,這只是對ECU簡單地進行干擾,由于用代碼進行的驅動,可以繼續豐富代碼來實現自動化測試,即將運行、監控、停止、保存的邏輯代碼寫好,導入待測車型的整車DBC數據庫文件,DBC里面定義好車型中的節點 ID及收發報文的信息,程序中設置每次測試干擾的報文就從 DBC中讀取,以及測試完成后以節點名稱、報文ID命名trce文件及自動保存,此過程代替了手動輸入節點名稱和報文ID的操作。過程如圖2所示。

圖2 干擾流程圖
4 分析測試結果
在測試過程中在上位機上保存了trce文件,對其中的數據進行分析,判斷是否滿足標準要求。圖3為BUS OFF恢復時序圖,標準中對BUS OFF故障通訊行為及恢復機制有以下評價標準:(1)上電/復位后,連續BUS OFF標志被設置為0,第1次BUS OFF屬于首次BUS OFF,所以要求T1小于 40 ms,越快越好。(2)如果t6大于 100 ms,則連續BUS OFF標志位被設置為0,那么第6次BUS OFF仍然屬于首次BUS OFF。(3)如果t6小于100 ms,則連續BUS OFF標志位被設置為1,那么第6次BUS OFF仍然屬于連續BUS OFF。(4)在極限情況下,當BUS OFF恢復后無正常報文發送時,即報文發送與下一次BUS OFF之間的時間不等于0 ms(t 6=0 ms),所以要求 T2、T3、T4、T5、T7、T8、T9、均在200±30 ms范圍內。
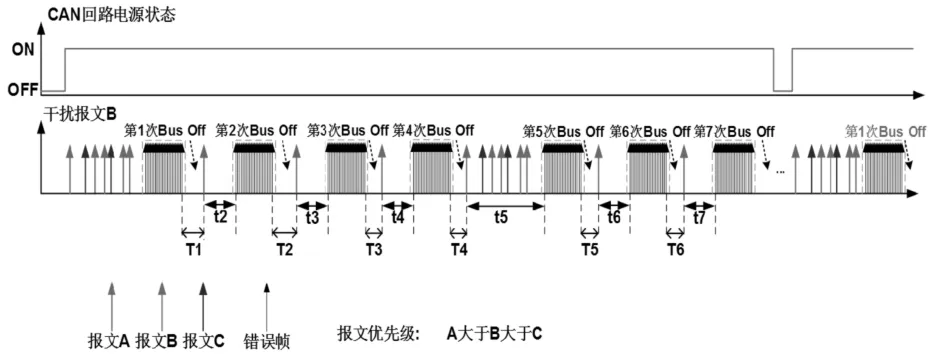
圖3 BUSOFF恢復時序圖
用 CANoe軟件回放功能,可分析數據是否滿足標準定義。
5 結束語
CAN網絡測試的自動化,不僅節省了人力物力,還很大程度地提升了測試效率。雖說自動化測試能帶來的好處很多,但是由于成本的原因,實際上部分測試項的復雜度還很高,自動化程度并不是越高越好。比如,整車的CAN網絡測試,問題點變化大,自動化測試設備很難分析得出預期的結果。本文描述的自動化測試系統,實際上就是基于純手動測試的硬件實現的。導入自動化的腳本,成本上沒有增加,卻比使用網絡自動化測試的板卡的設備性價比更高。本文提出的低成本自動化測試方案,為主機廠提高測試能力提供了的新方向。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50