旋轉導向鉆井工具姿態測量陀螺儀故障估計與處理方法
2021-08-05 02:34:12耿艷峰王偉亮程民彪
中國慣性技術學報 2021年2期
耿艷峰,孫 建,王偉亮,程民彪
(中國石油大學(華東)控制科學與工程學院,青島 266580)
旋轉導向鉆井技術是20 世紀90 年代發展起來的一項自動化鉆井技術[1]。與傳統的滑動導向鉆井相比,旋轉導向鉆井工具的井眼凈化效果好,井身軌跡控制精度高,位移延伸能力強[1,2]。工具面角參數是導向鉆井工具中的一項重要的姿態參數,表征了鉆頭的鉆進方向,實現工具面角的準確可靠測量是提高旋轉導向鉆井工具性能的前提。常用的工具面角測量傳感器包括:加速度計、磁通門、陀螺儀。大量研究表明單一傳感器往往難以實現準確測量[3-5],通過融合不同傳感器數據可以顯著提高測量精度,互補濾波和自適應卡爾曼濾波[6,7]兩種數據融合方法的應用較為常見。鉆井過程噪聲復雜,既有鉆具軸向、周向以及扭轉振動產生的周期性噪聲、又有隨著鉆井深度、壓力增加的趨勢性噪聲,噪聲分布往往是未知的。考慮到鉆井過程參數范圍基本可以確定,將非周期性噪聲、模型線性化、陀螺儀漂移等影響因素視為幅值有界但分布未知誤差(unknown but bounded error, UBB)進行處理具有理論上的可行性。針對UBB 誤差的集員估計理論近年來得到了快速發展,文獻[8]利用基于橢球集合的擴展集員卡爾曼濾波算法實現車輛位置和速度估計;文獻[9]提出一種基于中心對稱多胞體的集員狀態估計算法實現一類包含未知輸入和系統干擾系統的狀態估計;文獻[10]提出一種基于觀測器誤差界分區估計的集員估計方法,實現一類包含未知但有界干擾和噪聲的廣義系統的狀態估計。
高溫、高壓、強振動的鉆井環境極易導致工具面角傳感器出現故障,進一步可能引發其它事故。如果故障無法在井下進行處理,就要進行起鉆維修,嚴重影響了導向鉆井技術的推廣應用。文獻[11]中詳細分析了旋轉導向穩定平臺可能發生的故障類型,并針對不同傳感器提出了相應的故障檢測與處理方法,基本解決了加速度計的故障處理問題,但對于陀螺儀故障缺少相應的故障診斷和處理方法。實際系統中,故障的幅值信息是后續處理的重要基礎,能夠提供幅值信息的故障估計問題得到越來越多的學者關注。文獻[12]使用無跡卡爾曼濾波器對故障參數進行估計,實現故障發生后對控制器進行重構;文獻[13]在考慮模型不確定性以及環境噪聲的條件下,基于H∞理論利用線性矩陣不等式設計非線性觀測器研究了一類非線性系統的故障檢測、隔離和估計方法;文獻[14]提出一種新的滑模觀測器實現不滿足常見故障估計條件的系統的故障估計。
基于上述分析,本文嘗試利用自適應擴展集員卡爾曼濾波(adaptive set-membership extended Kalman filtering, ASM-EKF)算法解決導向鉆井工具面角傳感器的故障估計與處理問題。將陀螺儀故障項增廣為狀態變量,利用加速度計建立測量方程來估計陀螺儀故障,并對陀螺儀輸出進行校正,實現陀螺儀故障條件下工具面角的可靠測量。最后通過模擬樣機測試與仿真驗證方案的有效性,為故障條件下工具面角的精確測量與控制系統的正常運行奠定基礎。
1 工具面角測量系統濾波動態模型
1.1 工具面角測量方案
以動態指向式旋轉導向鉆井工具為例,其工具面角的傳感器布局方案參見文獻[7],如圖1 所示。采用雙加速度計和陀螺儀實現組合測量,雙加速度計對稱布局消除運動加速度的影響,消除運動加速度后的各軸加速度測量值用αx,αy,αz表示,加速度計的x軸平行于穩定平臺軸線,y軸指向穩定平臺切線,z軸指向穩定平臺軸心。
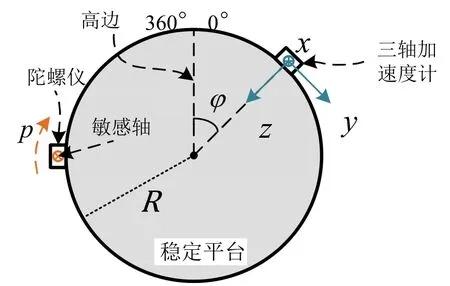
圖1 穩定平臺傳感器示意圖Fig.1 The diagram of stabilized platform sensors
則工具面角可由式(1)計算:
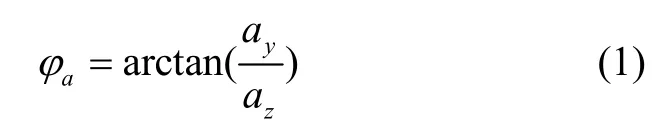
陀螺儀敏感軸與穩定平臺軸向平行,用來測量穩定平臺對地轉速,陀螺儀測量工具面角的公式為:

其中:φk是k時刻的工具面角,ωk為k時刻的陀螺儀輸出轉速,Ts為采樣時間。
1.2 工具面角組合測量模型
考慮陀螺儀輸出發生加性故障,根據式(2)獲得校正后的工具面角的迭代形式如下:

其中:fk表示陀螺儀的加性故障。
將工具面角和陀螺儀故障作為系統狀態,陀螺儀輸出作為系統輸入,建立如下的狀態方程:

根據式(1)建立雙加速度計量測方程,結合式(4)的狀態方程,建立工具面角測量系統的狀態空間模型:


2 自適應擴展集員卡爾曼濾波器
2.1 擴展集員卡爾曼濾波算法
擴展集員卡爾曼濾波算法是在卡爾曼濾波框架下,引入未知但有界誤差項來提升算法估計性能。擴展卡爾曼濾波算法需要對非線性模型線性化,將線性化誤差看作未知但有界誤差項描述為橢球集合,并與模型中涉及的未知但有界誤差求取閔可夫斯基和(Minkowski sum),獲得新的未知但有界誤差項[8,15]。模型(5)的量測方程為非線性方程,線性化造成的未知但有界誤差項描述為。
對量測方程線性化,將式(5)變換為如下形式:

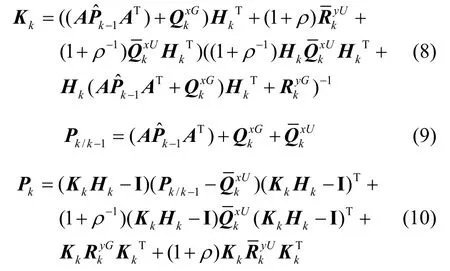
具有未知但有界誤差項和隨機誤差項的非線性系統的最優卡爾曼濾波增益、一步預測協方差以及新息協方差計算公式如下[8]:
2.2 UBB 誤差的數學描述
由式(5)可知,狀態方程是線性方程,不存在線性化誤差。因此,狀態方程的未知但有界誤差考慮陀螺儀的漂移以及模型誤差,將描述為如下橢球集合:

量測方程存在線性化誤差,將線性化誤差作為未知但有界誤差項考慮到濾波算法中,用來描述。量測方程的線性化過程如下:

陀螺儀具有多種故障形式,當發生突變故障時,新息協方差矩陣Pk會突然增加,導致濾波模型中的測量UBB 誤差增大,進而影響濾波算法收斂速度,甚至導致發散。在濾波過程趨于穩態值后,新息矩陣趨于極小值,可以根據新息矩陣的大小來判斷是否需要調節預測值,此處引入如下評價指標:

式中:ke為測量誤差矩陣,表示新息協方差矩陣的F范數,為測量誤差矩陣的2 范數,γ根據實際工況進行選取,γ值越大,故障估計的快速性越好,濾波算法的穩定性越差。
取nr=1,采用外邊界橢球來描述拉格朗日余項,同時保證正定,將進行如下描述:
其中:Hesk表示量測方程的Hessian矩陣,c1∈(0,1]為調節因子,若式(14)滿足,則認為濾波狀態穩定,c1=1 ;否則根據實際工況在取值范圍內選取。
2.3 集員Sage-Husa 自適應濾波算法
井下工況復雜多變,導向工具鉆進的過程中,地質的變化、穩定平臺運動狀態的變化、振動強度的變化等情況,都會導致系統噪聲和測量噪聲的變化,Sage-Husa 自適應濾波算法可以不斷地調整系統模型參數和噪聲模型統計參數,使濾波性能達到最優,常規的 Sage-Husa 算法都是針對傳統卡爾曼濾波模型[16,17],下面基于集員卡爾曼框架對該算法進行改進。
結合集員卡爾曼濾波框架以及式(7)的數學模型可得:
由式(7)和式(16)可得:

對式(17)左右同乘對應轉置,求取數學期望可得:

對式(18)等式右邊項進行處理:

由式(9)(18)結合式(19)~(22)變換,Qk-1替換為Qk得:
根據式(16)可得:

故測量噪聲Rk的自適應算法為:

為提升算法快速性,提出如下自適應方案:
綜上所述,自適應擴展集員卡爾曼濾波算法的具體步驟如下:
步驟2:根據式(14)、式(15)更新測量UBB 誤差;
步驟4:根據式(8)更新最優卡爾曼增益Kk;
步驟5:根據式(9)更新一步預測協方差Pk/k-1;
步驟6:根據式(10)更新協方差陣Pk;
步驟7:根據式(26)更新過程噪聲Qk和測量噪聲Rk
3 仿真與實驗
粘滑運動是鉆進過程中常見的工況,頻率在0.05~0.5 Hz 之間[18],根據穩定平臺測控系統性能要求,在0.5 Hz,200%粘滑度的工況下,工具面角波動范圍應小于15 °[11],這對算法的跟蹤性能提出了較高的要求。為了測試更嚴苛的條件,考慮井斜角為90 °的情況;使用0.5 Hz,波動幅值20 °的正弦模擬粘滑工況進行測試。
3.1 典型鉆井工況仿真
假設導向鉆井工具工作在造斜工況,工具面角固定在183 °;30 s 后發生粘滑,工具面角在183 °基準上以頻率為0.5 Hz,幅值為20 °的正弦波動;60 s 后改成穩斜鉆進,工具面角以36 ° /s的速度在0~360 °范圍內線性變化,90 s 后繼續造斜,工具面角維持在183 °持續到120 s。Baker Hughes 是世界三大油服公司之一,其井下振動手冊[19]將鉆具振動分為7 個等級,其中處于良好安全運行環境下的鉆具振動級別為0 級[0, 0.5 g)以及1 級[0.5 g,1 g),因此本文選取加速度計的振動噪聲方差為0.5g2,模擬1 級鉆具振動條件下的加速度計信號輸出情況;參考陀螺儀手冊[20],陀螺儀的速率噪聲密度為陀螺儀噪聲帶寬設置為1600 Hz,故將陀螺儀測量噪聲方差設置為100( ° /s)2,模擬陀螺儀固有噪聲。
為驗證ASM-EKF 性能以及陀螺儀故障估計性能,分別在如表1 所示三種陀螺儀故障狀態下進行仿真。采用雙加速度計測量方案、陀螺儀測量方案以及自適應擴展集員卡爾曼濾波算法來對上述工況以及故障類型下的工具面角的進行解算。

表1 仿真故障類型Tab.1 Simulation fault type
圖2 是無故障情況下三種方案的處理效果,加速度計解算受噪聲影響非常劇烈,解算工具面角的RMSE 為50.52 °,無法反映實際工具面角;陀螺儀解算相對精確,但陀螺儀解算工具面角值存在0.1 /s° 的漂移,120 s 后存在13.74 °的解算誤差,難以滿足性能要求;ASM-EKF 算法則利用數據融合的優勢,精準地實現了對工具面角的估計,RMSE 為2.55 °。圖3展示了加性故障I 下的解算效果,陀螺儀由于故障原因失去解算能力,ASM-EKF 算法仍然能夠精確的進行工具面角估計,RMSE 為2.49 °,并且準確地估計出陀螺儀的故障。
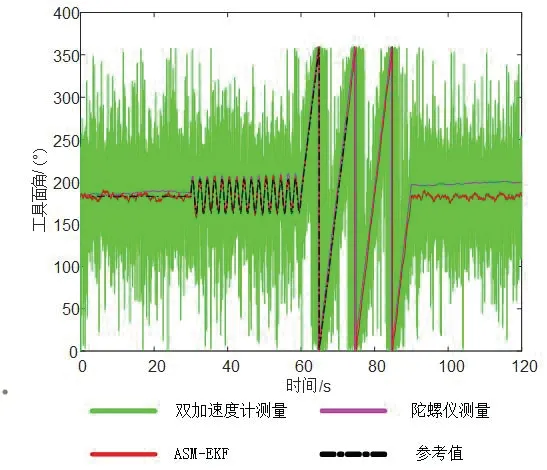
圖2 無故障仿真效果Fig.2 Fault-free simulation effect
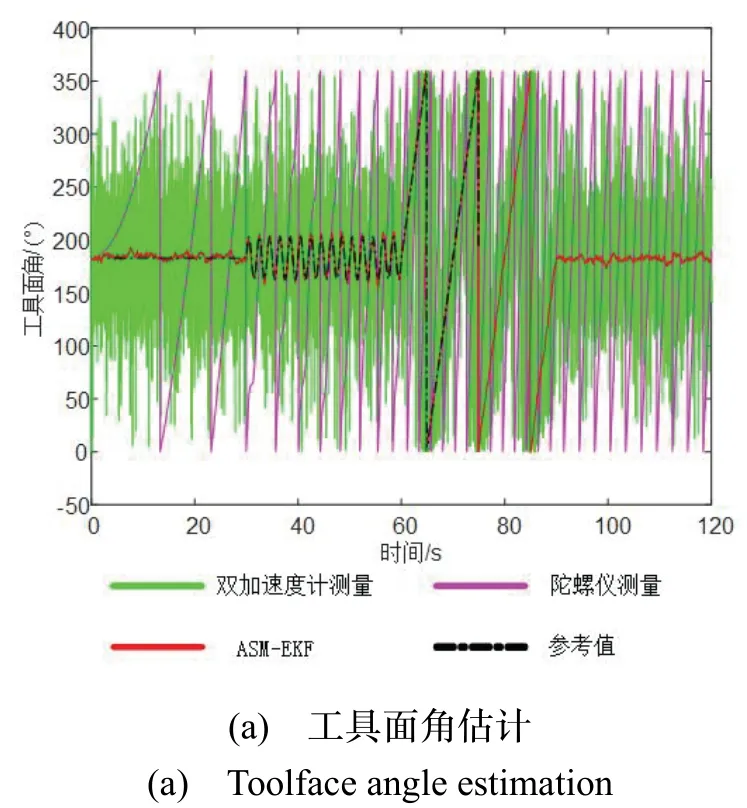
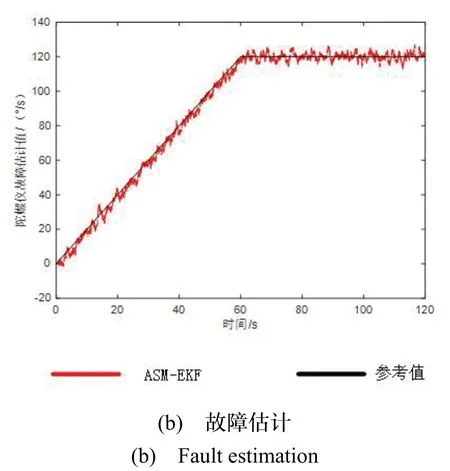
圖3 加性故障I 仿真效果Fig.3 Additive fault I simulation effect
圖4 展示了加性故障II 下的解算效果,突變故障下,ASM-EKF 算法的工具面角估計值有短暫的偏離,但是很快調整到實際值附近波動,RMSE 為3.57 °,故障估計值很快跟蹤上突變故障。
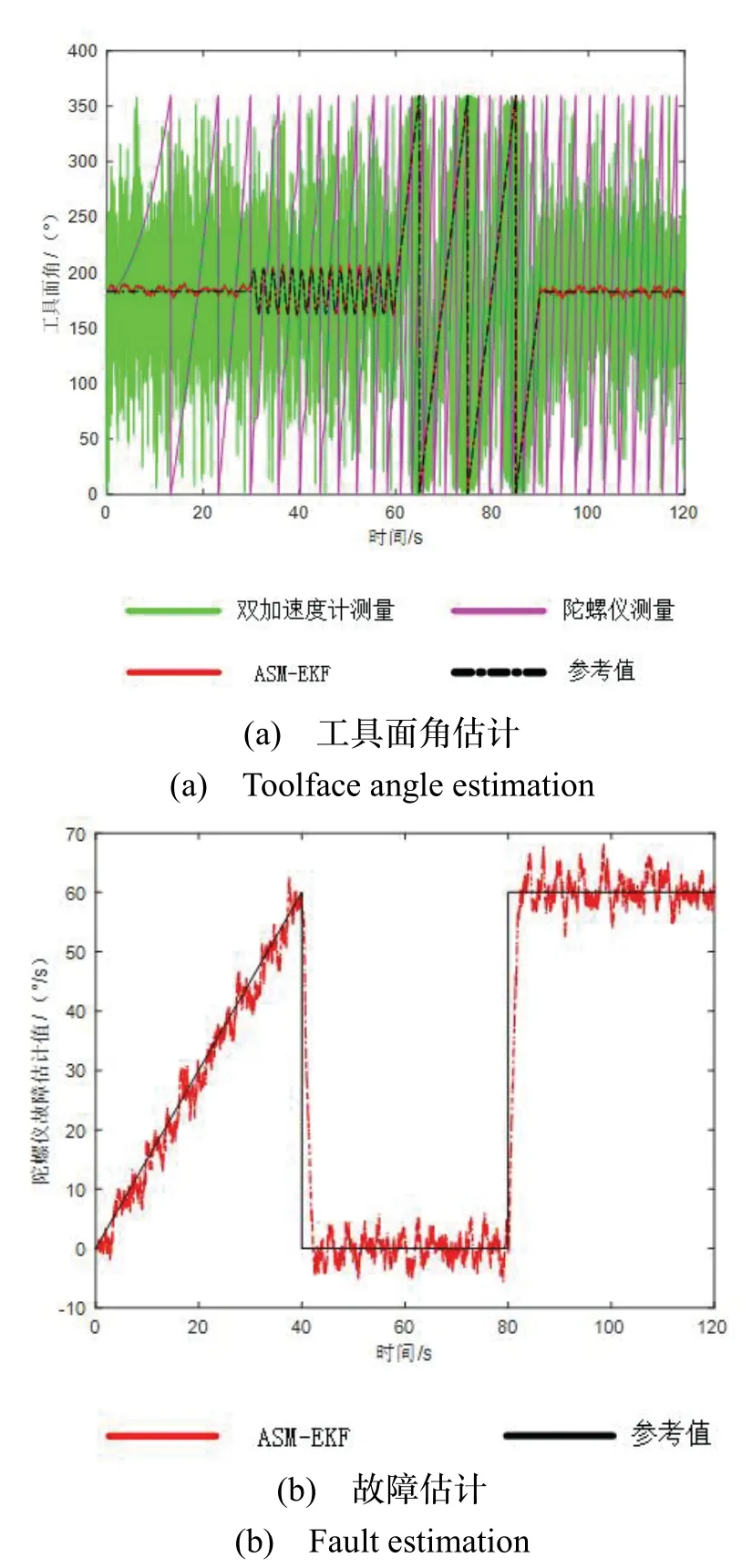
圖4 加性故障II 仿真效果Fig.4 Additive fault II simulation effect
圖5 展示了加性故障III 下的解算效果,驗證了ASM-EKF 算法對于10 °/s 范圍內故障下的工具面角仍具有較好的估計效果,RMSE 為2.55 °,與無故障時的精度相當。陀螺儀的故障估計值可以反映故障變化趨勢,但是相對于故障幅值具有較大的波動,這是由于陀螺儀固有噪聲與故障幅值處于同一量級所致。此時故障已在陀螺噪聲范圍內,嚴格意義地講,其已不能按故障進行處理。綜上說明ASM-EKF 算法具有大幅值陀螺儀加性故障的快速跟蹤估計能力,可以實現多種復雜加性故障下工具面角的可靠測量。
圖5 加性故障III 仿真效果 Fig.5 Additive fault III simulation effect
3.2 模擬樣機實測結果
課題組自行開發的動態指向式旋轉導向鉆井工具原理樣機參見圖6,樣機采用兩組三軸重力加速度計MMA8451 以及一個單軸陀螺儀ADXRS645 測量工具面角。

圖6 原理樣機結構圖Fig.6 Principle prototype structure drawing
利用原理樣機測試導向鉆井工具四種工作狀態來驗證該算法的實用性,同時分別與文獻[7]中采用的自適應擴展卡爾曼 (adaptive extended Kalman filtering,AEKF) 算法以及文獻[8]中提出的集員卡爾曼(set-membership extended Kalman filtering, SM-EKF)算法進行對比,驗證本文算法的性能。
實驗模擬的四種典型工況:恒工具面角、粘滑工況、穩斜工況、調工具面角。實驗中將原理樣機固定在振動臺上模擬井下振動。振動臺開啟后,振動頻率由0Hz 過渡到50Hz,之后持續在50Hz 振動,振動頻率的變化能夠更好地模擬井下實際振動,同時增加了處理的復雜性。
陀螺儀故障主要針對持續故障以及突變故障兩種情況進行模擬,具體故障模擬形式如表2 所示。
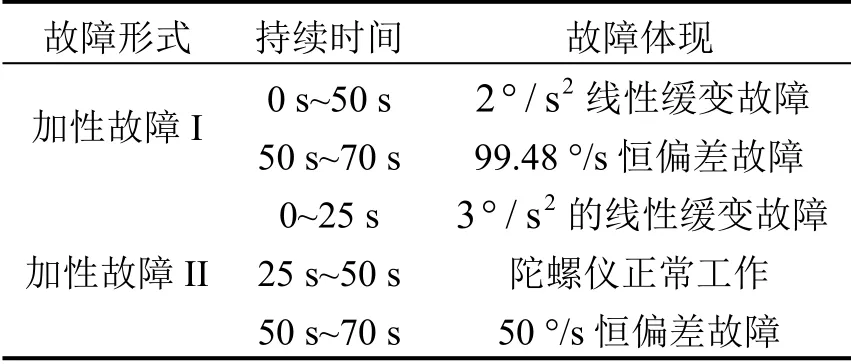
表2 實驗故障類型Tab.2 Experimental fault type
利用上述三種算法獲得的工具面角估計值與陀螺儀故障估計值如圖7、8 所示。不同故障條件下,不同算法獲得的工具面角估計值與參考值的均方根誤差(RMSE)對比如表3 所示。噪聲方差以及未知但有界誤差方差的初始值設置為[8]:
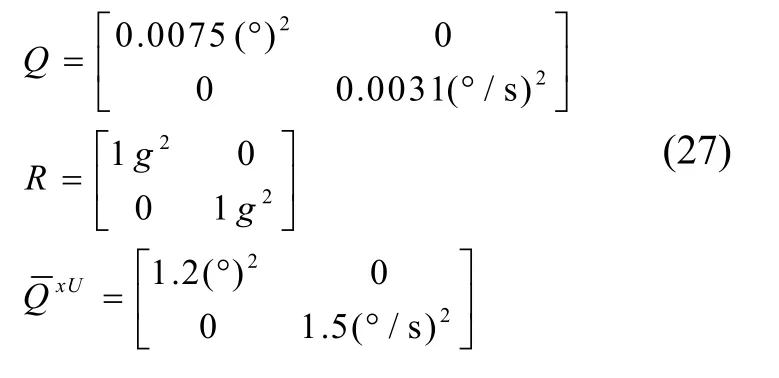
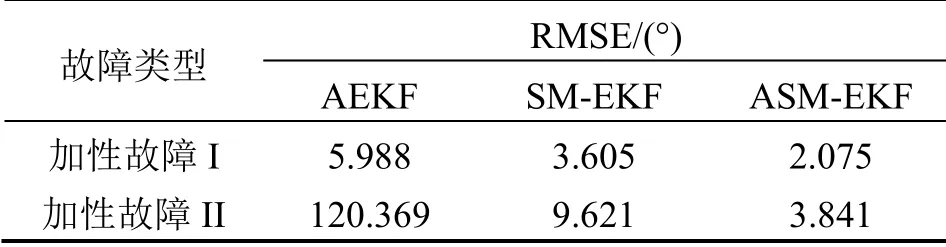
表3 工具面角估計均方根誤差Tab.3 Root mean square error of toolface estimation
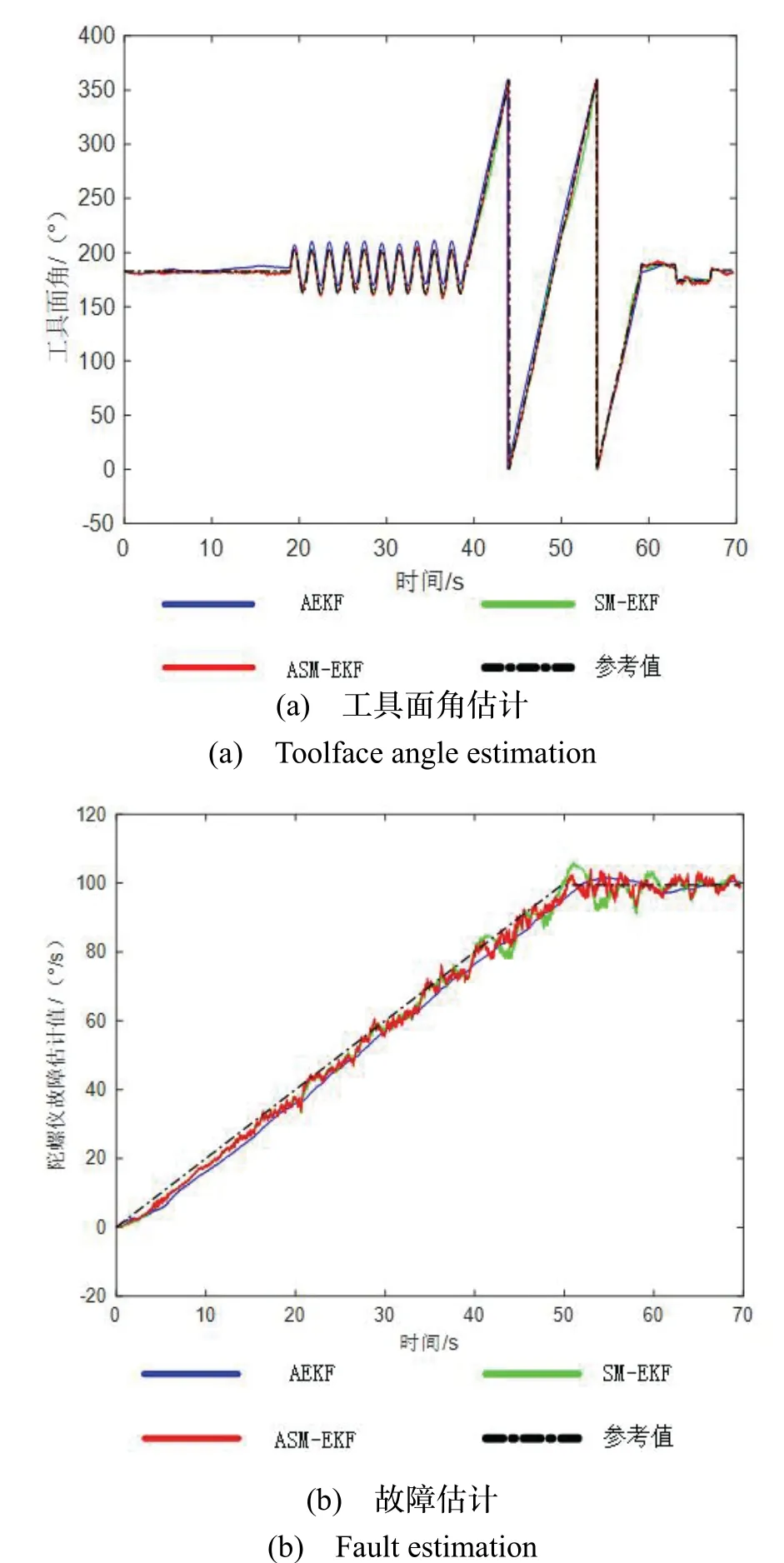
圖7 加性故障I 實測效果Fig.7 Additive fault I measurement effect
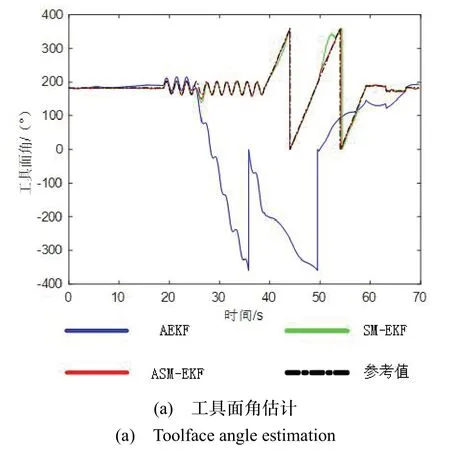
從圖7、圖8 中可以看出,對于加性故障I,三種算法都可以實現故障的跟蹤估計,文獻[7]所采用的AEKF 算法始終存在一定的偏離,導致工具面角的估計也存在一定程度的持續偏離。對于加性故障II,AEKF 算法完全失去故障估計能力,導致工具面角估計完全偏離,無法達到可靠測量要求;文獻[8]采用的SM-EKF 算法雖然可以快速跟蹤加性故障II,但是波動太大,從表3 可以看出,該方法在一定程度上會造成較大的工具面角估計誤差,無法滿足實際鉆井過程對工具面角測量的要求;而本文提出的ASM-EKF 算法可以快速準確地實現陀螺儀故障估計,在發生故障情況下,工具面角估計值的最大均方根誤差為3.841°,滿足實際鉆井技術需求。
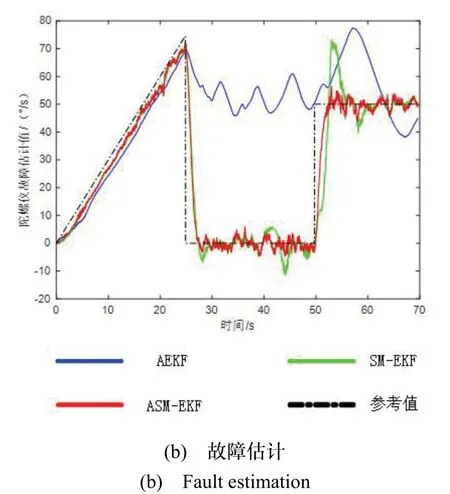
圖8 加性故障II 實測效果Fig.8 Additive fault II measurement effect
4 結 論
為解決動態指向式旋轉導向工具面角測量陀螺儀故障估計與處理問題,本文提出了一種自適應擴展集員卡爾曼濾波算法,實現了在陀螺儀發生加性故障情況下仍能夠準確地測量工具面角。仿真和實驗測試結果驗證了該方法的有效性。主要結論如下:
1)獲得了一種可靠測量工具面角的算法,在陀螺儀無故障時可以實現工具面角的準確測量,在陀螺儀發生加性故障情況時可以實時估計陀螺儀故障幅值,并對測量值進行補償修正。持續故障與突變故障下工具面角測量的RMSE 分別為2.075 °、3.841 °,滿足井下控制系統對工具面角測量精度的需求。
2)可以將線性化、陀螺儀漂移、井下振動等未知因素對井下傳感器測量數據的影響等效成未知但有界誤差項,SM-EKF 算法既有高效跟蹤突變故障的能力、又有較高的濾波精度,可以用于同類井下測量數據的處理。
本文是在實驗室進行的模擬測試,在振動強度以及振動變化規律等方面與實際鉆井環境仍有差別,需要通過實際鉆井環境進行測試,進一步提升該算法的實用性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
汽車維修與保養(2015年6期)2015-04-17 03:31:50