基于模糊控制的車輛主動避撞系統及仿真驗證
2021-08-06 06:17:08李文禮郭文博石曉輝張友松
重慶理工大學學報(自然科學) 2021年7期
李文禮,郭文博,石曉輝,陸 宇,張友松
(重慶理工大學 汽車零部件先進制造技術教育部重點實驗室,重慶 400054)
隨著我國汽車保有量的快速增加,因交通事故造成的人員傷亡和經濟損失也越來越大,作為智能交通系統的重要組成部分,車輛主動避撞系統能夠彌補駕駛員判斷及操作失誤的不足,可以減少38%的交通事故的發生,對提高交通安全、避免或緩解碰撞事故具有重大作用[1]。隨著車輛主動避撞系統的迅速發展,國內外學者提出來很多避撞模型,主要可分為安全距離模型和安全時間模型。對于安全距離模型,具有代表性的有NHTSA模型[2]、Mazda模型[3]、Honda模型[4]等。袁朝春等[5-6]考慮車輛制動性能等因素,建立了能同時兼顧駕駛安全和道路使用率的主動避撞DRV安全距離模型。劉志強等[7]以車輛臨界避撞條件下所需的最小減速度為閾值建立了DAC模型,其避撞率和及時性相比于TTC模型都有一定的提高。對于安全時間模型,胡遠志等[8]基于新的碰撞時間TTC開發了一種體現駕駛員控制優先性和協調性的主動避撞系統。裴曉飛等[9]提出碰撞時間余量的概念,設計了一種符合駕駛員避撞特性的分級報警/避撞算法。蘭鳳崇等[10]根據汽車追尾適度深度調查分析確定制動減速度,在考慮舒適性的條件下確定碰撞時間閾值建立主動避撞模型,其可在相對車速65 km/h以內有效避撞。這些主動避撞模型通常都采用了固定的參數,忽略了不同類型的駕駛員、不同的行車狀況的差異。對于不同類型的駕駛員在不同行車的狀況下,對主動避撞系統激活的時刻和制動停止后與前方障礙物保持的安全距離的要求都是不同的,這些因素不但會影響駕駛員駕駛時的緊張程度和安全感,還可能會在一定程度上影響交通,降低道路的運行效率。
考慮駕駛員類型和車輛行駛工況因素,建立了縱向和橫向危險狀態判別模型;利用模糊控制具有魯棒性強、具有較強的容錯能力、適用于解決過程控制中的非線性問題的優點,設計了基于模糊控制的車輛主動避撞系統,模糊控制器Ⅰ選取駕駛員類型和主車車速為輸入參數、主動制動閾值為輸出參數,根據駕駛員類型和行車工況的不同來控制不同的制動時刻,模糊控制器Ⅱ選取相對速度和相對距離,輸出制動信號以對車輛制動過程中的制動壓力進行控制,并通過Prescan仿真平臺對該主動避撞系統的有效性進行了仿真驗證。
1 主車危險狀態判別模型與主動避撞系統設計
在主車行駛過程中,主要是根據主車危險狀態判別模型來判斷其危險狀態以決定是否需要激活主動避撞系統及激活主動避撞系統的時機。錯誤地激活主動避撞系統不但無法有效地幫助駕駛員避免危險狀況發生,而且還可能會在一定程度下影響道路交通,降低運行效率。主車危險狀態判別要分為橫向和縱向兩個方面進行判斷,當2個條件全部滿足時,車輛主動避撞系統才會被激活。
1.1 縱向危險狀態判別模型建立
對于主動避撞系統,基于安全時間算法相比于安全距離算法更能體現駕駛員在自然駕駛狀態下的感知和判斷習慣。將以安全時間算法為基礎建立縱向危險狀態判別模型,根據主車與前方障礙物的運動狀態和位置關系計算出當前時刻的碰撞時間,并通過比較其與主動制動閾值的大小,來判斷主車縱向是否處于危險狀態。
碰撞時間(TTC)為主車和前方障礙物均保持當前運動狀態下到發生碰撞所剩余的時間,即
式中:drel為當前時刻主車與前方障礙物的相對距離;vrel為主車與前方障礙物的相對車速;v1為當前時刻主車的車速;v2為當前時刻前方障礙物的速度。計算出的碰撞時間TTC的值越小,則主車與前方障礙物發生碰撞的危險程度越大。
在車輛實際行駛過程中,一個激進并具有較好反應能力的駕駛員,可能會感到因系統設定的主動制動閾值過大而導致激活主動避撞系統的時刻過早,一方面過早的激活主動避撞系統可能會導致駕駛員失去對主動避撞系統的信任而關閉該系統,另一方面也可能會在一定程度上影響交通,降低道路的運行效率;而對于一個保守且反應能力較差的駕駛員,可能會感到由于系統所設定的主動制動閾值過小而導致主動避撞系統的激活時刻過晚,并且車輛停下時與前方障礙物保持的安全距離過小,對于這種類型的駕駛員來說可能并不安全,這種情況會使其過度緊張而產生驚慌感。另外,對于行車狀況的不同,駕駛員駕駛時的緊張程度和注意力集中程度也不同,當車輛處于高速行駛且有危險狀況即將發生的情況下,由于環境復雜,駕駛員通常較早地使車輛進入緊急制動狀態;而車輛處于低速行駛且有危險即將發生的情況下,駕駛員通常會較晚地采取緊急制動措施。因此,基于不同類型駕駛員特性并考慮不同行車狀況的縱向危險狀態判別模型才能充分保證主動避撞系統的高效工作。本文采用模糊控制來得到不同類型駕駛員和不同行車狀況下主動避撞系統中主動制動閾值。
該模糊控制器Ⅰ選取駕駛員類型和主車車速為輸入參數,取主動制動閾值TTC1為輸出參數。對于駕駛員類型,根據駕駛員制動反應時間的快慢,將駕駛員類型分為激進型、成熟型和保守型,其模糊集合為{aggressive(激進型),ripe(成熟型),conservation(保 守 型)},論 域 范 圍 為[1,1.4]。對于主車車速(km/h),其模糊集合為{Z0,P1,P2,P3,P4,P5},論域范圍為[0,100]。輸出量主動制動閾值的模糊集合為{P1,P2,P3,P4,P5,P6,P7},論域范圍為[0.8,1.8]。輸入輸出的隸屬度函數曲線如圖1所示。隸屬度函數采用三角形函數和梯形函數,模糊關系法則為Mamdani。模糊規則表如表1所示。模糊控制輸入輸出變量關系曲面如圖2所示。
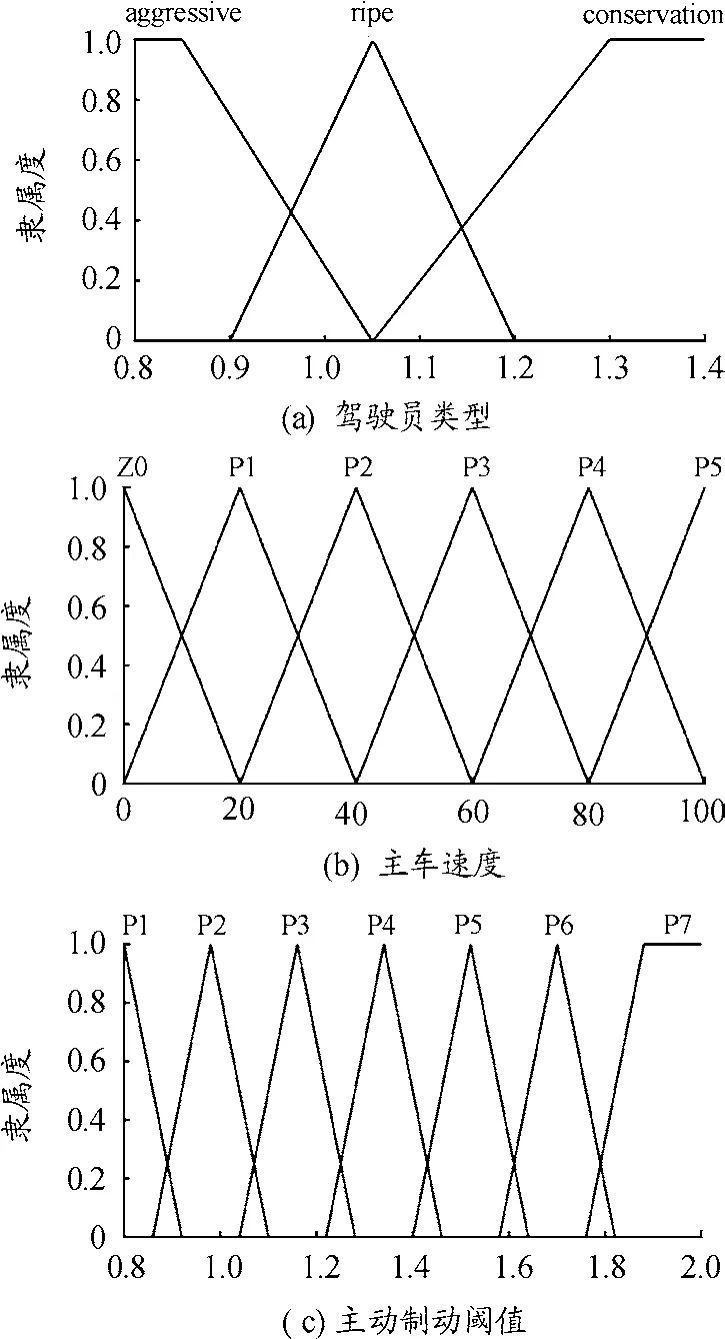
圖1 各變量的輸入輸出隸屬度函數曲線
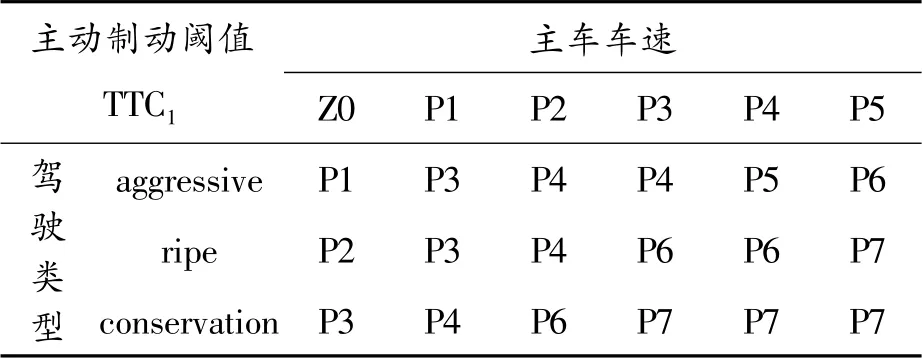
表1 模糊規則

圖2 模糊控制輸入輸出變量關系曲面
車輛行駛過程中前方車道有障礙物出現,當由前后兩車運動狀態計算出的TTC值小于等于主動制動閾值TTC1時,駕駛員若未能采取避撞措施,則此時縱向危險狀態判別模型將車輛的狀態判定為縱向危險狀態,如圖3所示。
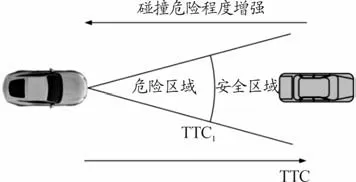
圖3 縱向危險狀態區域劃分示意圖
1.2 橫向危險狀態判別模型建立
在車輛行駛過程中,其前方的障礙物主要有同車道或鄰車道的車輛、行人和穿越主車所在車道的車輛、行人,其中鄰車道的車輛或行人和即將穿越主車車道的車輛或行人可能會導致主車主動避撞系統的“誤激活”,因此需要建立橫向危險狀態判別模型來判斷主車前方障礙物是否屬于危險目標,從而決定是否需要激活主動避撞系統。首先需要建立數據預處理模塊來對傳感器模型輸出的數據進行處理,得到主車與前方障礙物的橫向距離和縱向距離。傳感器探測的距離為主車與前方障礙物的直線距離,通過式(3)(4)將主車與前方障礙物的直線距離轉換為橫向距離和縱向距離。

式中:L為主車與前方障礙物的直線距離;S為主車與前方障礙物的橫向距離;D為主車與前方障礙物的縱向距離;θ為前方障礙物相對于主車的方位角。當主車與前方障礙物的橫向距離S≥W/2時,判斷前方障礙物為非危險目標,因此不會在行駛過程中激活主動避撞系統。當主車與前方障礙物的橫向距離S≤W/2時,前方障礙物可能有變道、轉向或穿越車道的趨勢,則判斷該目標車輛為危險目標。如圖4所示,當前方障礙物處于1、4區域時,橫向危險狀態判別模型判斷此時為橫向安全狀態;當前方障礙物處于2、3橫向危險區域時,則橫向危險狀態判別模型判斷此時為橫向危險狀態。其中,W為車道寬度,一般為3.5~4 m,本文取W=3.8 m。

圖4 橫向危險狀態區域劃分示意圖
當縱向和橫向危險狀態判別模型都判斷此時車輛處于危險狀態時,如果駕駛員還是未能采取避撞措施,則車輛主動避撞系統會被激活,代替駕駛員接替車輛控制權,制動壓力會自動施加以避免碰撞發生。
2 主動避撞制動系統設計
由于模糊控制具有魯棒性強、靈活性好的特點,并且具有較強的容錯能力,其設計不依靠對象精確數學模型,而是利用語言知識模型進行設計和修正控制算法,適用于解決過程控制中的非線性問題[11],因此采用模糊控制對主動避撞制動系統進行設計,根據不同的行駛狀況調整不同的制動措施,更能體現主動避撞系統的智能性。
主動避撞制動系統模糊控制器Ⅱ的輸入變量為主車與前方障礙物的相對距離D(m)和主車與前方障礙物的相對速度Δv(km/h),輸出變量為主動制動信號S。輸入輸出參數都用7個語言變量進行描述。主車與前方障礙物的相對距離D的模糊集合為{VS(極小),MS(中小),S(小),M(中),B(大),MB(中大),VB(極大)},其論域范圍為[0,70];主車與前方障礙物的相對速度Δv的模糊集合為{N1,N2,N3,N4,N5,N6,N7},其論域范圍為[-120,0];主動制動信號S的模糊集合為{VS,MS,S,M,B,MB,VB},其論域范圍為[0,1],該輸出信號將與車輛最大制動壓力相乘得到車輛制動壓力。輸入輸出變量的隸屬度函數曲線如圖5所示。
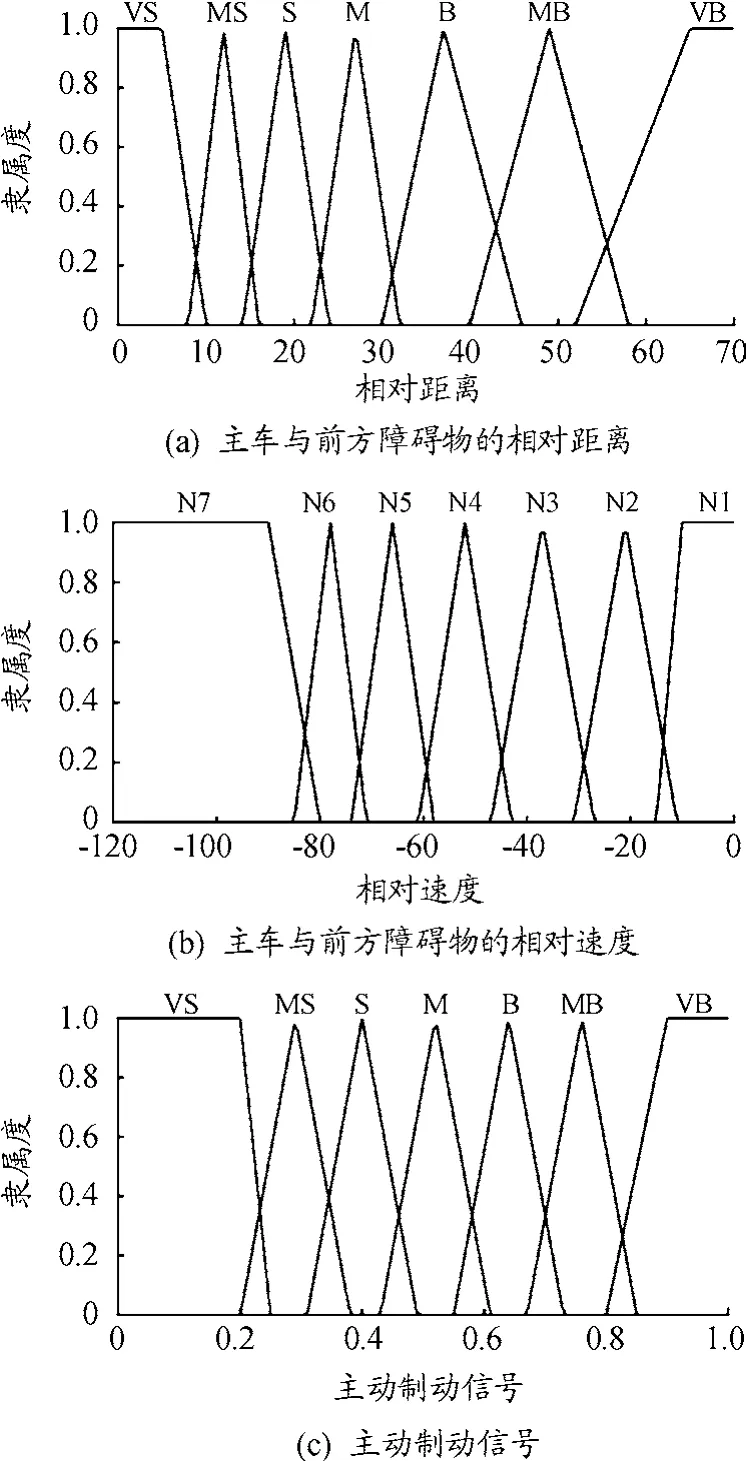
圖5 輸入輸出變量隸屬度函數曲線
隸屬度函數采用三角函數和梯形函數,模糊關系法則為Mamdani。推理規則如表2所示。模糊控制輸入輸出變量關系曲面如圖6所示。

表2 模糊控制規則
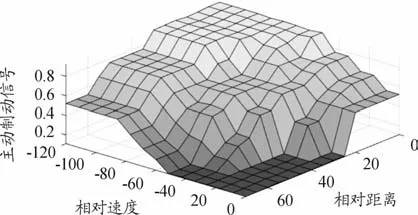
圖6 模糊控制輸入輸出變量關系曲面
模糊語言規則推理部分如下:
1.If(D is VS)and(Δv is N1)then(Sis M)
2.If(D is VS)and(Δv is N2)then(Sis B)
49.If(D is VB)and(Δv is N7)then(Sis M)
3 典型工況下的仿真分析
測試工況參考中國新車評價規程(C-NCAP)中關于車輛自動緊急制動系統的典型測試方法。選取其中前后兩車相對速度最大的工況前車靜止工況(CCRs)和車輛碰撞遠端行人工況(CVFA-50)驗證該主動避撞系統的有效性。兩種工況將基于Prescan仿真平臺進行場景搭建。
3.1 仿真模型搭建
在基于Prescan對車輛主動避撞系統進行仿真驗證時,需要通過傳感器模型感知前方危險目標的信息。因此,對主車配置傳感器模塊,選擇TIS(Technology Independent Sensor)傳感器模型,配置一個探測距離為100 m、水平探測角度為20°的長距離雷達,但是由于長距離雷達的探測角度過小,可能無法探測到近距離兩側的目標,導致主動避撞系統不能進行正確決策,因此再配置一個探測距離為60 m、水平探測角度為50°的短距離雷達,2個傳感器的位置均安裝在主車前保險杠中心。另外由于在車輛制動過程中會發生前傾現象,如果雷達垂直探測角度過小,則會發生目標信息丟失的現象,從而影響避撞系統控制策略進行正確的決策[12],因此,長距離雷達和短距離雷達的垂直探測角均取15°。
車輛模型選用2D Simple動力學模型,部分參數如表3所示。
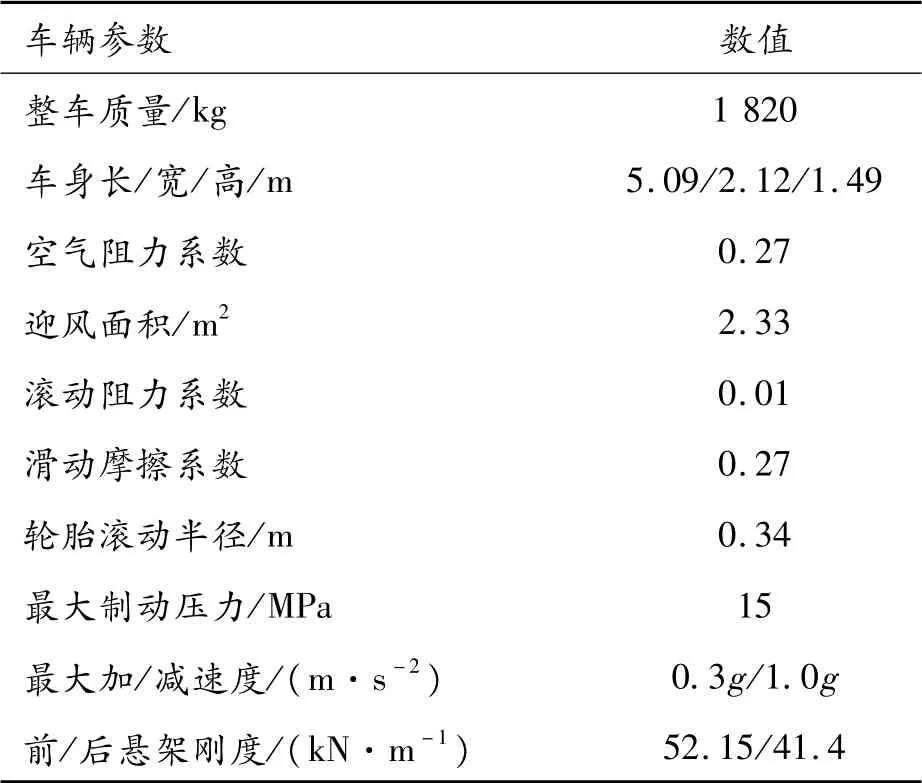
表3 車輛參數
建立CCRs和CVFA-50仿真測試工況。
CCRs工況:主車以一定速度朝前方靜止的車輛勻速移動,主車的速度范圍為10~60 km/h。
CVFA-50工況:行人以6.5 km/h的速度從測試車輛遠端6 m處,沿車輛運動的垂直方向運動,要求若車輛不進行制動,行人將與車輛寬度50%處相撞,主車的速度范圍為20~60 km/h。
3.2 典型工況下的仿真結果分析
3.2.1 前車靜止工況(CCRs)
在城間道路交通中,車輛一般會以較高車速行駛,因此建立CCRs_1場景:主車以60 km/h的速度接近前方靜止車輛,主車與前車的初始距離設為60 m。仿真時長設為8 s,激進型和保守型主動避撞控制策略仿真結果如圖7、8所示。
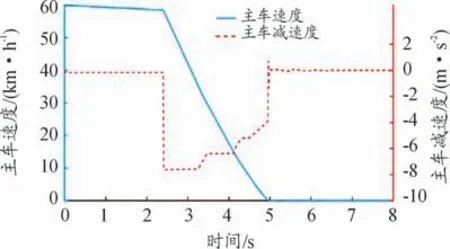
圖7 激進型避撞策略曲線(CCRs_1)
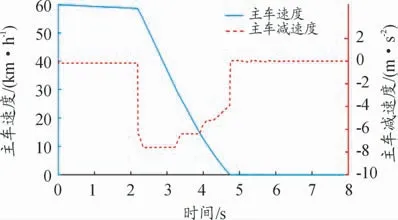
圖8 保守型避撞策略曲線(CCRs_1)
由于靜止車輛始終保持在主車的正前方,因此橫向危險狀態判別模型始終判斷前車位于橫向危險區域,主車處于橫向危險狀態。對于圖7激進型主動避撞控制策略,2.41 s時,由前后兩車運動狀態計算出的TTC值小于縱向危險狀態判別模型輸出主動制動閾值1.3 s,因此,此時縱向危險狀態模型判斷前車位于縱向危險區域,主車處于縱向危險狀態,此時滿足主動避撞系統激活條件,該系統開始對車輛進行主動制動,車輛進入減速度為-7.6 m/s2的制動狀態,且繼續接近前方靜止車輛,車輛以-7.6 m/s2的減速度保持0.8 s后,隨著主車速度的迅速下降,碰撞風險降低,因此減速度也逐漸降低,舒適性有一定的提高,在4.95 s時,主車速度減小為0,車輛停止,此時主車與前車的相對距離為最小值2.2 m,該主動避撞系統能夠有效避撞,整個避撞過程經歷的時長為2.54 s;對于圖8保守型主動避撞控制策略,2.2 s時,TTC小于主動制動閾值1.5 s,此時主動避撞系統被激活,激活瞬間車輛減速度達到-6.4 m/s2,由于碰撞風險較高,隨后迅速上升到-7.6 m/s2并保持0.9 s,減速度隨碰撞風險的降低而減小。在4.8 s時,主車速度減小到0,此時與前車的最小相對距離為5.6 m,該系統避撞成功,整個避撞過程經歷的時長為2.6 s,最大制動減速度保持時間較短,對駕駛員駕駛影響不大。
在城市道路交通中,車輛通常會以較低的車速進行行駛,因此建立CCRs_2場景:主車以30 km/h的速度接近前方靜止車輛,主車與前車的初始距離設為60 m,仿真時長設為10 s,激進型和保守型主動避撞控制策略仿真結果如圖9、10所示。
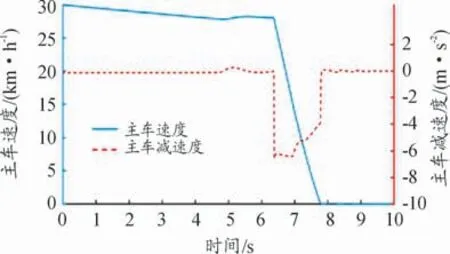
圖9 激進型避撞策略曲線(CCRs_2)
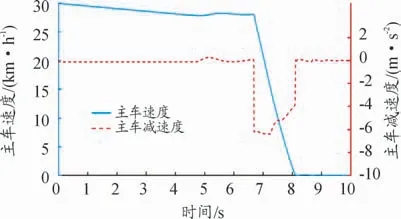
圖10 保守型避撞策略曲線(CCRs_2)
靜止車輛始終位于主車正前方,因此主車處于橫向危險狀態。對于圖9激進型主動避撞控制策略,6.68 s時,TTC值小于主動制動閾值0.93 s,此時前車處于縱向危險區域,主車處于縱向危險狀態,主動避撞系統介入,車輛減速度在0.5 s內從-6.1 m/s2上升到-6.4 m/s2,隨著主車速度的迅速減小,碰撞風險開始降低,減速度也隨之減小,8.1 s時,主車速度減為0,車輛停止,與前車的最小相對距離為2.1 m,避撞成功,整個避撞過程經歷時長為1.42 s,且在制動過程中最大減速度為-6.4 m/s2;對于圖10保守型主動避撞控制策略,6.37 s時,TTC小于主動制動閾值1.24 s,此時主動避撞系統介入,車輛減速度迅速達到-6.4 m/s2,在7.84 s時,主車速度減小到0,此時與前車的相對距離為最小值4.6 m,該系統避撞成功,且制動過程中最大減速度達到-6.5 m/s2,整個避撞過程經歷時長為1.47 s。相比于CCRs_1測試工況,CCRs_2測試工況2種避撞策略在車輛制動過程中最大制動減速度分別減小了-1.2 m/s2和-1.1 m/s2,制動過程產生的慣性沖擊有所減小,駕乘舒適性略有提高。
另外,當主車以10 km/h的速度接近靜止車輛,激進型避撞策略和保守型避撞策略分別在TTC等于0.84 s和1.16 s時對車輛進行制動,激進型主動制動閾值較小,避免了干擾激進型駕駛員正常駕駛。制動過程的最大減速度僅為5.1 m/s2,屬于中等制動,相比于車輛以60 km/h速度行駛的CCRs_1工況,其最大制動減速度減小了-2.5 m/s2,進一步減輕了車輛制動時產生的慣性沖擊和噪聲帶給駕乘人的不適感,駕乘舒適性也得到進一步提高。該主動避撞控制策略兼顧了車輛高速行駛工況下的安全性和低速行駛工況下的駕乘舒適性。
主車以10~60 km/h的速度分別進行測試,以10 km/h為間隔,在不同速度下,主車完全停止后與前方靜止車輛的相對距離如圖11所示。對于激進型主動避撞控制策略,車輛主動制動完成后,與前方靜止車輛的相對距離保持在1.5~2.2 m;對于保守型主動避撞控制策略,車輛主動制動完成后,與前方靜止車輛的相對距離保持在2.2~5.8 m,均可完全避免碰撞危險。
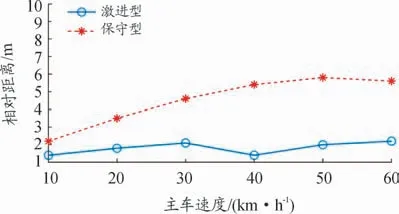
圖11 不同速度下相對距離測試結果
3.2.2 車輛碰撞遠端行人工況(CVFA-50)
建立CVFA-50場景:主車以60 km/h的速度行駛,主車與行人的初始縱向距離為55 m,行人以6.5 km/h的速度行走,行人與主車中心線的初始距離為6 m,行人行走的路徑與主車行駛的路徑垂直。仿真時長設為8 s。激進型和保守型主動避撞控制策略仿真結果如圖12、13所示。
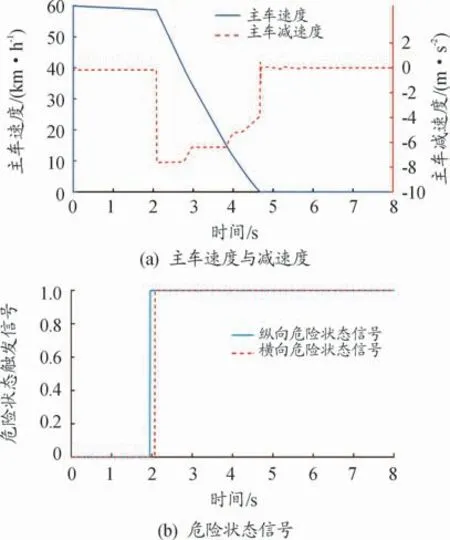
圖12 激進型避撞策略曲線(CVFA-50)
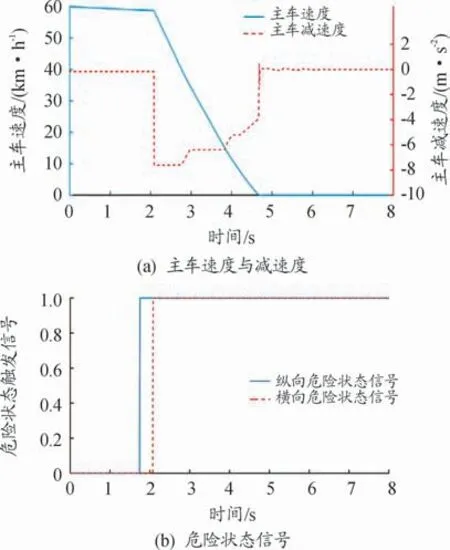
圖13 保守型避撞策略曲線(CVFA-50)
對于激進型主動避撞控制策略,如圖12(b),在1.95 s時,TTC值小于縱向危險狀態判別模型輸出的主動制動閾值1.3 s,此時縱向危險狀態模型判斷行人已位于縱向危險區域,主車處于縱向危險狀態,但橫向危險狀態判別模型判斷行人位于橫向安全區域,不滿足主動避撞系統的激活條件,在2.07 s時行人位于橫向危險區域(即行人進入主車所在車道),主車處于橫向危險狀態,因此主動避撞系統被激活,如圖12(a)車輛進入減速度為-7.6 m/s2的制動狀態,車輛以-7.6 m/s2的減速度保持0.8 s后,隨著碰撞風險降低,減速度也逐漸降低,4.67 s時,主車速度減小到0,車輛停止,此時與前方行人的縱向最小距離為0.5 m,避撞成功,整個避撞過程經歷時長為2.6 s;對于保守型主動避撞控制策略,如圖13(b),在1.74 s時,TTC小于主動制動閾值1.5 s,縱向危險狀態判別模型判斷行人位于縱向危險區域,但橫向危險狀態判別模型判斷行人位于橫向安全區域,主動避撞系統沒有激活,在2.07 s時行人位于橫向危險區域,主動避撞系統被激活,此時制動過程與激進型主動避撞策略相同,如圖13(a),車輛減速度迅速達到-7.6 m/s2,4.67 s時,主車速度減小到0,車輛停止,此時與前方行人的縱向最小距離為0.5 m,避撞成功。該工況下由于先判斷車輛為縱向危險狀態,后判斷車輛為橫向危險狀態,因此制動時刻較晚,車輛停止后與前方行人的縱向距離較小。
根據C-NCAP中CVFA-50測試方法的要求,主車分別以20~60 km/h的速度進行測試,以10 km/h為間隔,在不同速度下,主車完全停止后與行人的縱向相對距離如圖14所示。對于激進型主動避撞控制策略,車輛制動完成后,與前方行人的縱向相對距離保持在0.5~2.3 m;對于保守型主動避撞控制策略,車輛制動完成后,與前方行人的縱向相對距離保持在0.5~4.8 m,均可完全避免碰撞危險。

圖14 CVFA-50工況測試結果
4 結論
1)綜合考慮駕駛員類型和不同的行車狀況的因素,建立了縱向和橫向危險狀態判別模型,通過一個以駕駛員類型和主車車速為輸入參數,主動制動閾值為輸出參數的模糊控制器Ⅰ控制不同行車狀況中主動避撞系統不同的激活時刻,并建立一個以相對速度和相對距離為輸入、以主動制動信號為輸出的模糊控制器Ⅱ。
2)根據C-NCAP中的CCRs和CVFA-50工況對設計的主動避撞系統進行了仿真驗證。仿真結果表明:設計的主動避撞系統在所有工況下均能夠有效避免碰撞,在最危險的工況下(CVFA-50,主車速度60 km/h),制動停止后與前方目標保持的最小相對距離為0.5 m。
3)主車在60 km/h的行駛工況下,最大制動減速度為-7.6 m/s2,而在10 km/h的行駛工況下,最大制動減速度為-5.1 m/s2,主動避撞系統在保證車輛高速行駛工況下安全性的前提下,在一定程度上提高了車輛低速行駛工況下的駕乘舒適性,同時主動避撞系統激活時機的差異還滿足了駕駛員對該系統的個性化要求,既能防止對激進型駕駛員駕駛時產生不必要的干擾,又能保證保守型駕駛員對安全感的需求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
