一種寬負載范圍的自激調控型WPT系統
2021-08-09 05:18:24何逸輝
新型工業化 2021年2期
關鍵詞:系統
何逸輝
(同濟大學電子與信息工程學院,上海 201804)
0 引言
類似數據的無線通訊,人們同樣向往電能的無線化以省去端子和電纜等傳統電氣連接件,以此提高用電設備的供電靈活性。基于磁耦合諧振式(Magnetic Resonant Coupling, MRC)[1]的無線電能傳輸(Wireless Power Transfer, WPT)可以為無人機等移動用電設備提供更為靈活的供電方式[2],近年來引起了廣泛研究。如圖1所示是MRC-WPT系統的基本結構。直流電源供給逆變器轉化為高頻交流電在發射端線圈中激發出磁場,接收端線圈拾取磁場能量。L1與L2之間為空氣等無磁響應材料,以此實現電能的無線傳輸。接收端整流后可以連接升降壓變換器等調制電路,它們可以整體等效為耗能負載Req。逆變器輸出端口后的部分可以整體等效為系統的輸入阻抗Zin。對于MRC-WPT系統,經常引入補償電路來減小松耦合線圈產生的無功功率,以此提高輸入功率因數并增加負載功率[3]。其中一種最為普遍的機制是只使用兩個電容進行補償。對應圖1中的發射端補償電容C1和接收端補償電容C2。
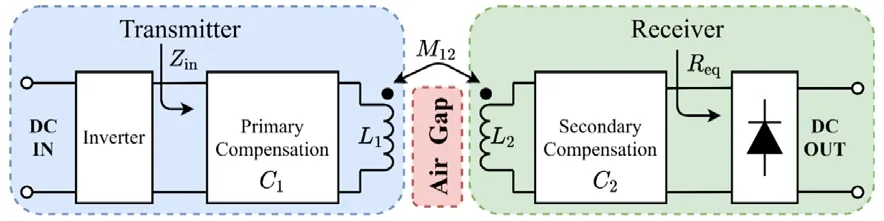
圖1 MRC-WPT系統基本框圖
實際的移動用電設備需要滿足寬負載范圍的需求,其主要源于系統耦合的變化和接收端輸出所連接的可變負載[4]。然而,基于磁共振的WPT系統,傳輸功率和傳輸效率面對耦合變化和可變負載都十分敏感[4-5]。這對MRC-WPT系統投入實際應用時的供電可靠性提出了巨大挑戰。
一些工作側重于優化傳輸功率和效率等指標,在固定參數下對系統特性展開了研究工作。基于一組特定參數對無人機充電,系統平均傳輸效率約為50%[6]。基于系統保持高效傳輸的目標,部分學者設計了閉環控制策略以應對發射端與接收端之間的耦合變化。采用無線通訊的方式進行了反饋調節,使系統工作在最佳工作點[7]。然而,采用無線通訊傳遞反饋信號繼而進行控制的策略難以在電力傳輸線等復雜電磁環境下進行應用[5]。因此,面向實際WPT系統,設計合適的調控方法仍然有待進一步研究。
另有一些工作側重提升WPT系統的供電靈活性。提出了關鍵耦合點的概念后區分了系統的過耦合和欠耦合區,并仔細分析了系統在過耦合區的頻率劈裂和欠耦合區的頻率簡并現象[8]。之后,涌現了一些工作,以系統應對耦合變化或者可變負載時維持高效傳輸為目標,開展一系列分析設計。采用自激驅動,在固定負載且系統耦合較強的條件下,應對系統耦合變化進行了調控以維持高效傳輸[5]。設計了阻抗匹配,在固定耦合且系統耦合較弱的條件下,探究可變負載的恒流輸出特性[4]。然而,在工業產品中,耦合變化及可變負載都是WPT使用中的切實需求。因此,在同一系統中,對耦合變化及可變負載下的系統特性,均開展研究工作并設計調控方法,具有更為切實的應用價值。
基于已有工作并綜合上述分析,本文設計了一套新穎的MRC-WPT系統。該系統采用自激驅動,實現了寬負載范圍功率穩定的高效率傳輸。實驗樣機僅需檢測發射端的線圈電流作為系統反饋信號,可以省去復雜的通訊與控制電路,使系統的穩定性得以提高。
1 系統設計
對應圖1中耦合線圈L1、L2以及補償電容C1、C2,根據其連接方式,一般分為S/S,S/P,P/S,P/P四種基本結構[3]。具體拓撲如圖2所示,其中,L1、L2、r1、r2分別代表耦合線圈自感及其寄生電阻,C1、C2分別代表發射端與接收端的補償電容。

圖2 四種基本補償結構圖
設計了應用于恒壓恒流充電的S/P-S/SP混合補償拓撲[9]。其中,S/P型拓撲可以在特定工作頻率及固定耦合下,應對負載的變化維持恒流輸出。受到該工作的啟發,本文基于S/P補償結構結合自激驅動進行分析設計。圖3是本系統的電路原理圖,其中,VDC代表供給逆變器的直流電壓源,iL1代表流過發射線圈L1的電流,ug1和ug2代表驅動半橋工作的互補信號。L1和L2分別代表發射線圈和接收線圈的自感;M12代表兩線圈之間的互感。C1和C2指發射線圈和接收線圈的補償電容。發射諧振回路和接收諧振回路的寄生電阻由r1和r2表示。i1代表流過濾波電感Lf1的電流,uD1代表整流二極管D1的對地電壓,RL表示實際負載電阻。Vout和Iout分別代表RL兩端的電壓和流過RL的電流。
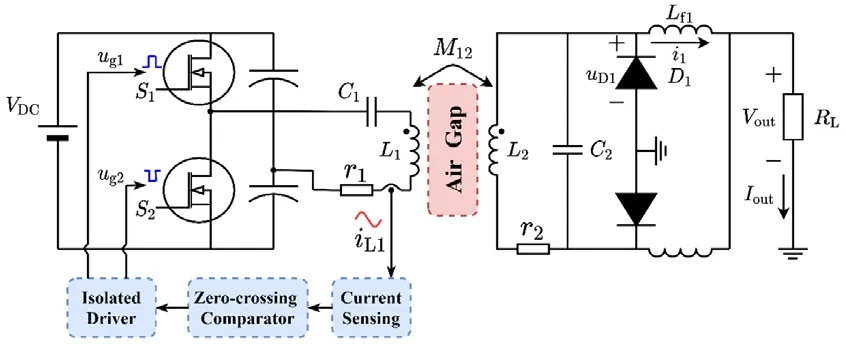
圖3 本系統的電路拓撲圖
半橋結構是常用的DC/AC逆變拓撲[5,10]。與圖1中逆變器部分相對應,圖3中本系統選用對稱半橋實現交流恒壓源,驅動發射端諧振單元工作。電流模式D類(Current-Mode Class D, CMCD)整流器是AC/DC整流裝置[4],適合與并聯諧振回路相連。與圖1中整流部分相對應,圖3中本系統選用CMCD型整流器作為接收端整流裝置。受到[11]工作的啟發,采用自激驅動可以提高MRCWPT系統應對耦合變化時的自適應,維持傳輸效率的穩定。此外,為使半橋逆變器的MOSFET實現零電壓開通(Zero Voltage Switching, ZVS),系統輸入阻抗Zin應呈現出弱感性[12]。因此,圖3中本系統的反饋環節首先通過“電流互感器”采集發射線圈的電流信號,接著由“過零比較器”獲取相位信息,最后通過“隔離驅動器”產生互補信號驅動“半橋逆變器”工作,使發射端電源等效表現出負電阻特性。
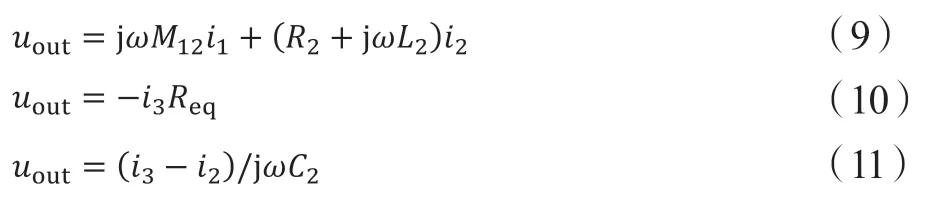
為便于分析本系統特性,可以將圖3所示的系統電路原理圖可以等效為如圖4所示的電路框圖。其中,圖3中發射端的半橋逆變器可以看作一個交流恒壓源,對應圖4中uin。圖3中接收端的CMCD型整流器及后端實際負載RL可以等效為一個負載電阻Req。整流器由兩個二極管組成,它們交替導通對稱的半個周期。因此,本文可以選取上管D1為研究對象,在其關斷的半個周期分析系統特性。期間,圖4中輸出電壓uout即為等效電阻Req兩端的電壓uD1。

圖4 本系統的等效電路圖
下面分析圖4中等效電阻Req與圖3中實際電阻RL之間的數量關系:
首先,圖3中接收端濾波電感Lf1兩端的電壓應滿足伏秒平衡,即:整流二極管D1的對地電壓uD1、直流輸出電壓Vout以及流過濾波電感Lf1的電流i1應滿足式(1):

當接收端諧振單元品質因數足夠高時,整流二極管D1的對地電壓uD1可看作正弦半波,即滿足式(2)。其中Vm是交流幅值,ω是正弦波角頻率。

由式(1)和式(2)可推知uD1幅值Vm與直流輸出Vout滿足式(3):

根據能量守恒以及正弦波幅值與其有效值之間的關系,可推知式(4):

因此,圖4中等效電阻Req與圖3中實際電阻RL之間應滿足式(5):

繪制了系統傳輸效率隨耦合系數及工作頻率變化的曲面圖[8]。該工作指出,在過耦合區段,為保持傳輸效率穩定,系統的工作頻率應隨著系統耦合變化而相應變化。上述工作一般基于外形對稱的線圈開展研究設計。然而,非對稱耦合的線圈更具一般性,擁有更多的應用場景[13]。如圖5所示,本系統發射端線圈直徑大于接收端線圈直徑,接收端線圈匝數更多、電感量更大。本文通過改變發射線圈Tx與接收線圈Rx之間的相對位置,即中心軸向距離dz與水平偏移距離dr,來改變本系統的耦合。

圖5 發射端與接收端相對位置
參照已有工作對系統頻率劈裂特性的分析,本文結合系統自身參數,繪制了dr=0mm時系統的工作頻率隨發射線圈與接收線圈軸向距離dz變化的曲線。如圖6所示,本系統中心頻率f0約在229.0kHz。當系統工作在過耦合區時,系統的工作頻率劈裂成上下兩個分支。理論上,系統處于任一分支工作時,均可保持高效傳輸。對于本文所設計的系統而言,工作在上分支時,系統處于弱感性區;工作在下分支時,系統處于弱容性區。由于本系統選用半橋逆變器作為恒壓激勵源,所以本系統更適合在上分支工作。
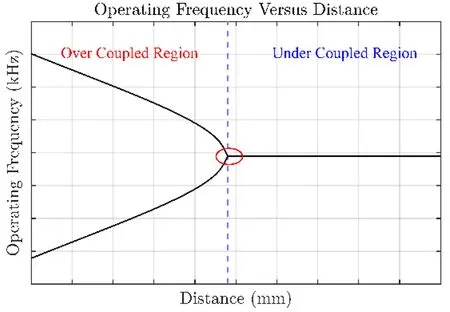
圖6 系統頻率特性
以下,首先對本系統應對耦合變化的特性開展分析。對應本系統等效電路圖4,在本系統中,輸出功率可以表示為式(6),系統效率可以表示為式(7)。

對圖4中各網孔、節點列寫基爾霍夫方程,可得式(8)~(11):

根據式(8)~(11)可以得到發射端電流i1與輸出電流i3之間的關系,如式(12)所示:

其中:

對應圖4,將表1中工況一的相應參數代入式(12),即可計算得到輸出電流i3與輸入阻抗Zin。根據上述計算結果,本文繪制了如圖5(a)所示,系統輸出功率Pout關于系統工作頻率的一族曲線;以及如圖5(b)所示系統輸入阻抗Zin的虛部關于系統工作頻率的一族曲線。通過觀察這兩組曲線變化,可以推知:當系統的耦合在一定范圍內發生變化時,本系統可以通過改變工作頻率,使系統始終工作在弱感性區,以此維持輸出功率近似不變。

圖5 不同耦合下的系統工作點
同樣參照式(12),代入表1中工況二的相應參數,計算輸出電流。此時,本系統同樣工作在過耦合區,工作頻率維持在1.1150ω0左右(ω0=2πf0)。圖6展示了一組系統在不同耦合狀態下輸出電流隨負載變化的曲線族。可見,應對負載的變化,本系統的輸出電流Iout表現出恒流特性。
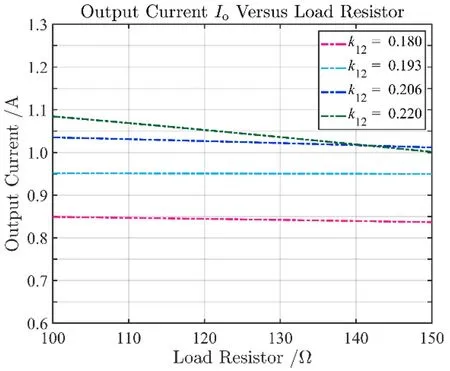
圖6 輸出電流隨負載變化曲線
2 系統實現
根據上述分析計算,本系統能夠在過耦合區應對耦合的變化達到穩定的輸出功率,應對負載的變化維持恒流輸出。此外,由于本系統實時處于諧振狀態,功率因數較高,并且半橋逆變器工作在弱感性區,開關損耗低。故本系統的傳輸效率也將維持在較高水平。為了對上述分析所得到的系統特性進行驗證,本文搭建了如圖7所示的實驗樣機開展測試。
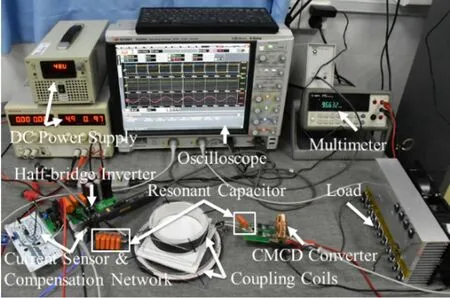
圖7 實驗樣機圖
MRC-WPT系統對開關和整流功率器件的工作頻率、開關速度都有著較高的要求,為了減少開關和導通損耗,提高系統效率,本系統中采用了碳化硅(SiC)功率器件。在本實驗樣機中,半橋逆變器使用了SiC-MOSFET,CMCD整流器使用了SiC材質的整流二極管。
半橋逆變器中的上下橋臂,由流過發射線圈Tx的電流進行控制。如圖8所示,Tx上的電流信號由電流互感器采樣,并依次經過級聯的RL補償網絡,過零比較器,同相或反相緩沖器,隔離驅動芯片,產生具有一定死區時間的互補驅動信號來驅動上下橋臂。控制電路所使用的器件型號在表2中進行了匯總。

圖8 實驗樣機的控制電路

表2 實驗樣機中所使用的元件
發射端線圈由0.1×600股的李茲線進行繞制,接收端線圈由0.078×300股的李茲線進行繞制。發射端諧振電容C1由5個4.7nF,2.5kV的金屬化聚丙烯薄膜(MKP)并聯。接收端諧振電容C2由1個4.7nF,2.5kV的MKP和1個1.6nF,2.5kV的MKP并聯。發射端與接收端諧振回路的自諧振頻率f0均設置為229kHz。系統采用貼片厚膜電阻作為實際耗能負載。耦合線圈的機械外形參數在表3中進行了匯總。

表3 耦合線圈的機械參數
3 實驗結果
本文主要通過觀察實驗系統的工作波形以及工作頻率、輸出功率、輸出電流和傳輸效率等指標來表征系統的傳輸性能。圖9展示了一組系統工作在過耦合區的典型工作波形。VDS(odd)表示半橋上管的漏源極電壓波形,VDS(even)表示半橋下管的漏源極電壓波形,IP表示發射端線圈的電流波形,Vout表示接收端經過CMCD整流器后的輸出電壓波形,IS表示接收端線圈的電流波形。由波形可見,本系統中半橋逆變器上管和下管交替工作對稱的半個周期,下管漏源極電壓略微超前于發射端線圈電流,系統工作在弱感性區,進而實現了上,下橋臂的ZVS,有效減小了續流二極管恢復損耗和電壓尖峰,達到了預期的設計目標。
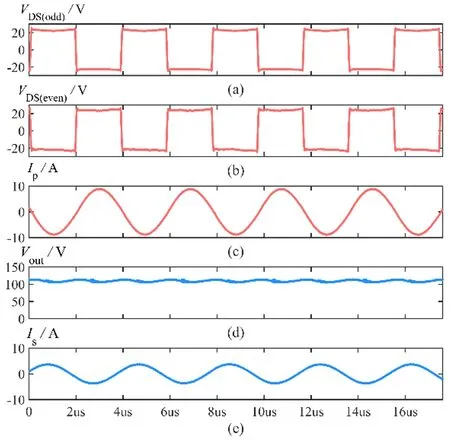
圖9 實驗樣機的典型工作波形
根據本文第1部分的分析,本系統可以在固定負載下,應對耦合的變化保持輸出功率不變。如圖10(a)-(c)所示,使系統工作于表1中的工況一,即負載固定而耦合系數改變的條件,分別記錄系統工作頻率、輸出功率和傳輸效率隨傳輸距離變化的相應數據,擬合成對應曲線圖。當系統工作在過耦合區時,工作頻率偏移系統的本征頻率;相反,當系統工作在欠耦合區時,系統的工作頻率與本征頻率基本相等。通過觀察這組曲線可知,在軸向距離dz約25mm范圍內,系統工作在過耦合區,系統的輸出功率約為120W,整體系統DC/DC效率(包含驅動功率)約為89%。實驗測量結果與本文第1部分理論計算基本吻合。因此,本文設計的MRC-WPT系統能夠在一定的三維空間內維持傳輸功率和效率保持不變,可以提高移動用電設備的供電靈活性。如圖10(d)-(f)所示,使系統工作于表1中的工況二,即負載固定而耦合系數改變的條件,分別記錄系統工作頻率、輸出電流和傳輸效率隨實際負載值變化的相應數據,擬合成對應曲線圖。可見,當實際負載在100~150Ω間變化時,系統處于過耦合區,輸出電流基本維持在1A左右,與本文圖6理論計算基本吻合。
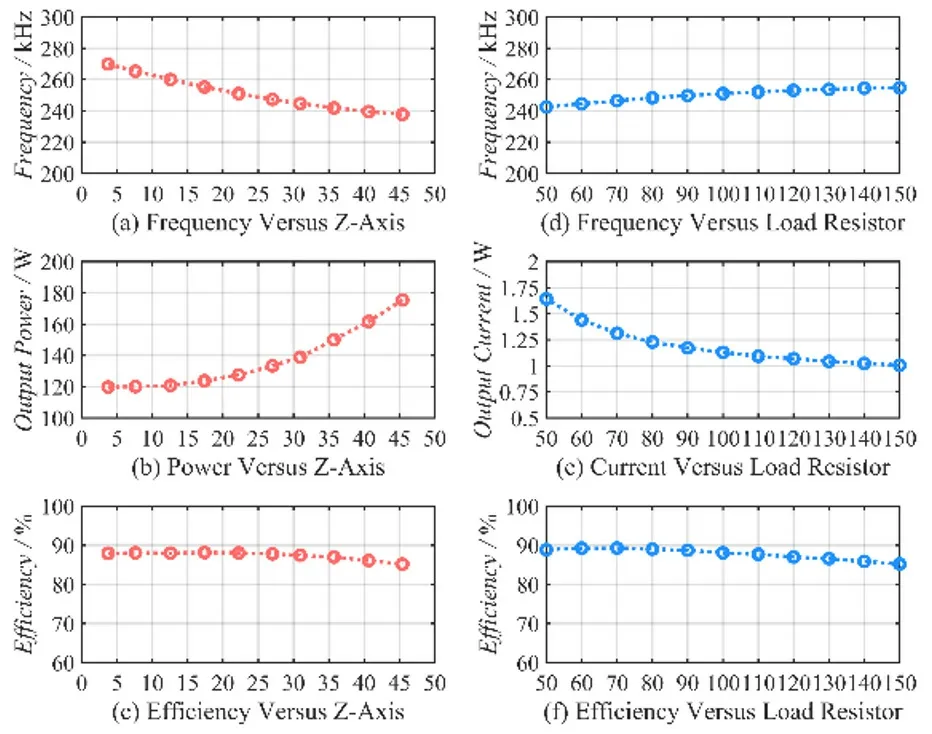
圖10 實驗樣機傳輸性能
4 結論
為提高無線電能傳輸系統的供電靈活性,本文基于S/P補償結構,采用自激驅動設計了一種高效DC/DC百瓦級MRC-WPT系統,并對其特性進行了分析。理論計算表明,本文設計的系統在負載固定的工況下,能應對耦合的變化保持穩定的傳輸功率和傳輸效率;在耦合固定的情況下,應對負載變化能保持較高傳輸效率并具有恒定輸出電流的特性。同時,在本文設計的控制機制中,僅僅需要檢測發射端的電流作為反饋信號,而不依賴于額外的無線通訊,這大大簡化了發射電路的復雜性并提高了系統可靠性。本文也設計了一套無線電能傳輸的實驗樣機,對理論分析所得到的結果進行了驗證。本文為實際MRC-WPT系統的靈活供電需求提供了有益的設計思路。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
