有纜遙控水下機器人在水利水電工程領域的應用現(xiàn)狀與發(fā)展前景
2021-08-09 05:19:02林泓李靈汐
新型工業(yè)化 2021年2期
林泓,李靈汐
(福州大學,福建 福州 350108)
0 引言
我國水系眾多,全國各地水壩水庫分布廣泛,水電水利領域設施建設發(fā)達,數(shù)量多、分布廣、差異大,造成當前我國水電水利基礎設施水下檢測、清理、勘探難度大,專業(yè)團隊規(guī)模難以滿足現(xiàn)實需求。隨著機器人技術的發(fā)展,水下機器人因其工作高效性、操作便捷性和安全可靠性等諸多優(yōu)勢逐漸代替人工進行水下作業(yè),成為水利水電基礎設施定期維護的一大有力助手。當前我國水下機器人的發(fā)展具有一定技術積累和經(jīng)驗可循,本文將結合各地有纜遙控水下機器人應用實例針對優(yōu)點與弊端進行深入思考和初步探析。
1 水下機器人的分類及其特點
根據(jù)是否載人,水下潛水器可分為載人潛水器(見圖1a[1]、b[2])和無人潛水器兩類,其中載人潛水器一般簡稱為HOV,無人潛水器一般簡稱為UUV。水下機器人一般是指無人潛水器[3],水下機器人可根據(jù)與水面是否有支持設備分為有纜遙控水下機器人(一般簡稱為ROV)(見圖1c[1]、d[4])與自治水下機器人(一般簡稱為AUV)(見圖1e[1]、f[4]),根據(jù)運動方式的不同ROV常分為移動式、浮游式和拖曳式三種[5]。

圖1 當前典型水下潛水器
HOV的主要作用是在復雜的深海環(huán)境下協(xié)助科研人員完成高效的資源勘探、周密的科學考察和連續(xù)的開發(fā)作業(yè)等任務。其優(yōu)點是可為科研人員提供直接觀察深海的環(huán)境,利于準確地做出決策。目前我國在大深度載人潛水器領域達到世界領先水平,2020年11月10日8時由我國自主設計、集成的萬米載人潛水器“奮斗者”號在馬里亞納海溝10909米的深度上坐底,創(chuàng)造了在載人深潛領域我國的歷史新紀錄,為我國探索深海科學奧秘、保護和合理利用海洋資源提供了又一重要的科研利器[2]。但由于任務安全性差、深海水壓大等不利因素,載人潛水器存在著一定的局限性[6]。ROV的最大特點是通過臍帶纜連接水面支持設備與ROV,操作人員在水面或岸邊通過遙控裝置操縱ROV作業(yè)。ROV可通過母船獲得源源不斷的能量,能在水下進行長時間的作業(yè),且可在ROV主體上加裝機械臂等作業(yè)工具,以適應各種不同場合的使用。AUV則無需通過臍帶纜與水面支持設備相連,依靠自身攜帶的動力,按照人們預先設定好的程序進行自主航行[7]。盡管AUV可極大降低人員風險,但是其動力能源有限,續(xù)航時間短,難以執(zhí)行復雜任務,另外其使用后的回收問題至今沒有較好解決方法,特別是在大深度、高輻射、高危險地區(qū)使用的AUV回收將更加困難,一定程度上會造成環(huán)境污染與破壞。
綜上所述,ROV由于其實時性好、穩(wěn)定性強、續(xù)航時間長等優(yōu)勢能夠滿足絕大多數(shù)水利水電工程領域的應用需求,因此在我國已將ROV應用于水利水電工程領域[8]。
2 應用于水利工程水電領域有纜遙控水下機器人的應用現(xiàn)狀
2.1 水庫大壩閘門的水下檢測與清理
若有異物如枕木、泥沙進入水庫大壩閘門門槽內淤積或卡死時,很可能會造成閘門落底失敗或閘門既無法落下,又無法收回的危險情形。因此為了確保安全需要在閘門進行開啟前,確認閘門門槽內的異物狀況,如有必要應清理淤積異物,確保綜合評估認為不存在安全隱患,方能落放閘門。鑒于開閘次數(shù)多、水下異物辨識難、清理工作時效慢等現(xiàn)實情況,難以通過專業(yè)人員快速完成檢測清理工作,可通過ROV破解上述難題,閘門的水下檢測與清理實例如圖2所示。利用水下定位系統(tǒng)、水下多波束圖像聲納系統(tǒng),對ROV的水下位置進行確定,同時掌握水下建筑物的結構形狀[9-11]。后續(xù)操作人員可通過操作遙控手柄,將ROV遙控至閘門處。在近距離水下建筑物的整體通過水下高清攝像和聲吶掃描的方式進行觀察,對水下閘門的異物情況進行觀察并將圖像通過臍帶纜傳輸至岸基處。岸上操作人員通過操控機械臂可快速開展堆積物清理工作,并可通過圖像實時評估完成進度,為水壩閘門的落放提供了有利的安全保障,相較于潛水員水下作業(yè)具有安全性高、工作時間長、作業(yè)深度深、操作性簡便等優(yōu)點[8]。

圖2 閘門的水下檢測與清理實例圖
2.2 消力池的水下檢測
消力池是水工建筑物常用的消能設備之一,消力池底板的安全穩(wěn)定是水庫大壩正常發(fā)電和汛期安全泄洪的重要保證。由于大流量高速水流和夾渣的沖擊,消力池底板易誘發(fā)空化、空蝕破壞以及磨蝕、沖坑、錯臺等缺陷,從而由局部破壞帶動大面積失穩(wěn)破壞,存在安全隱患,需要定期檢測底板狀態(tài)。在水質較好的清水環(huán)境內,可利用ROV水下高清攝像以及機械手等設施,進行水下檢測消力池底板的穩(wěn)定性,如圖3所示。在水質較差的復雜水域環(huán)境下,ROV視頻攝像技術所拍攝的畫面不清晰[9,12-13]。若采用水下多波束圖像聲納系統(tǒng),它發(fā)出的聲波在遇到被測物后會反射回聲納表面,再利用回波獲得被測物的聲納圖像信號,因此采用多波束聲納圖像并結合水面光線輔助定向措施后,系統(tǒng)便能可清晰辨識消力池的輪廓及尺寸,在百米范圍內全方位檢測水下消力池底板沖刷破損情況、查明露筋等缺陷位置,較潛水員水下作業(yè)更方便安全[14]。
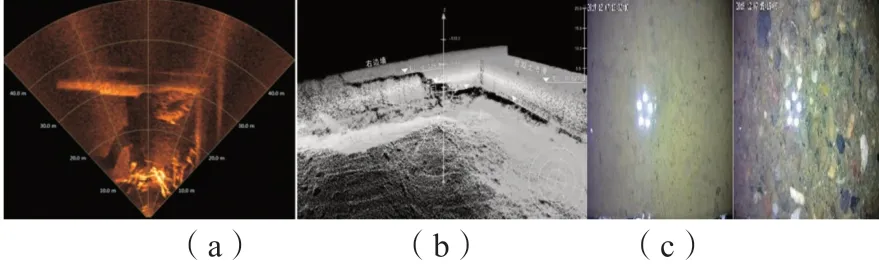
圖3 消力池的水下檢測實例圖
2.3 水庫大壩壩體的水下檢測
鋼筋混凝土材料在我國的水庫大壩壩體修建中被廣泛使用,隨著時間的推移,在水庫大壩壩體表面或內部會出現(xiàn)裂縫、空洞等缺陷。大壩庫區(qū)面積大、水質清,因此可以采用ROV進行具體的水下檢測,充分發(fā)揮ROV的水下優(yōu)勢。通過ROV攜帶的水下多波束圖像聲納系統(tǒng)對大壩壩體進行檢測,確定大壩的滲漏位置,再利用基于CNN的高清攝像技術對滲漏處進行視頻觀察,同時通過電腦存儲圖像資料及ROV的位置信息,為后期大壩壩體加固提供資料。壩體的水下檢測實例圖如圖4所示[5,7,15]。
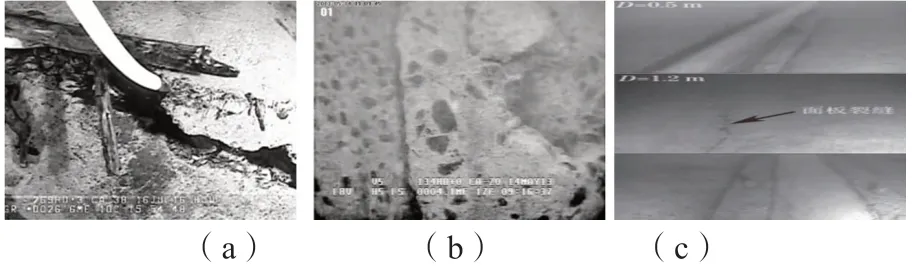
圖4 壩體的水下檢測實例圖
3 應用于水利水電工程領域有纜遙控水下機器人的發(fā)展前景
盡管有纜遙控水下機器人在水利水電工程檢測中的具有較好的應用現(xiàn)狀,但由于實際檢測環(huán)境可能存在水質較渾濁、臍帶攬被水下雜物纏繞、水流較快難以有效控制等情況,始終制約著有纜遙控水下機器的應用前景。因此未來有纜遙控水下機器人應該朝著高智能化、自動化的水下沉積物識別,高效率、高精度的水下沉積物定位,簡潔、高效的控制穩(wěn)定控制等方向發(fā)展。
3.1 高智能化、自動化的水下操作
目前水下清理工作依賴于負載機械臂與成像系統(tǒng)相互配合,通常由成像系統(tǒng)反饋目標畫面,在岸上操作人員控制下操控機械臂對體積較大的堆積物進行破碎、挖除[16]。當野外水下作業(yè)環(huán)境泥沙沉積較多,單純依靠成像系統(tǒng)辨別目標將會使得ROV工作陷入停滯,工作時限與清理效果都難以保證。此外應對體積較小的堆積物時,在水質渾濁條件下對目標物的辨別定位存在一定阻礙。由此可見,有攬水下機器人通常需適應水體巨大、環(huán)境復雜、能見度不一的工作條件,應對水下精細化清理任務,因而迫切需要提升ROV智能識別技術,對水下清理對象進行快速辨析和處理、調度系統(tǒng)、自主控制負載在盲像區(qū)域開展工作,在一定程度上擺脫ROV對操作人員的依賴性。
3.2 高效率、高精度的水下定位
遙感水下機器人較傳統(tǒng)人工作業(yè)有著較大的高效優(yōu)勢,應對每年我國汛期水下工程應急監(jiān)測和應急搶修,ROV因其操作安全性和設備便攜性有著巨大的應用空間。但遙感水下機器人所配備的供給動力和輸送控制的臍帶攬讓水下機器人的移動受限,且連接母船與本體的臍帶攬在行進過程中被水下雜物纏繞也成為應急操作時的一大隱患[10]。目前各地水庫工作應用中常采用成像技術與機械臂操作相互配合對行進過程中的雜物進行移除,從而避免推進器被纏繞而發(fā)生系統(tǒng)故障不得不中止作業(yè),但此過程耗時過長,難以應對實際應急水電水利病險探測和搶修工作[5]。而集成聲吶探測技術現(xiàn)下主要應用于水電水利工程水下檢測領域,如大壩閘門、消力池和大壩壩體等水下結構的水下檢測,水下沉積物搜尋目標物的辨識和定位具有一定成效。由此我們可以將聲吶探測技術結合智能分析系統(tǒng)對前方障礙物進行趨避,計算出水下最佳行進路線實行繞障礙行進,降低推進器纏繞風險,以提升ROV水下行進速度,縮短移動時耗,為作業(yè)實施延長時限,以應對病險水利特殊情況下滿足水下情況勘探和搶修應急的特定需求。
3.3 簡潔、高效的穩(wěn)定控制
有纜水下機器人的水下移動主要由岸上操作人員依據(jù)水下環(huán)境圍繞作業(yè)目的進行操控,操控系統(tǒng)主要是依據(jù)流體動力學結合水下操作的自由度進行耦合性的使用[6],但有纜水下機器人在作業(yè)時通常需要根據(jù)不同目的搭配不同負載和設備,因此各個作業(yè)任務點的不同水下機器人的整體重量等物理參數(shù)存在變化,使得目前應用于我國水電水利工程的有纜水下機器人只能滿足于流速不大于1m/s的穩(wěn)定水況,現(xiàn)實情況是在眾多壩體檢測、應急搶修或是橋洞勘探作業(yè)中水流環(huán)境往往超出上述限定范圍,對有纜水下機器人的運動控制和應用場景都有所影響[17]。因而針對有纜水下機器人作業(yè)的可變性,需進一步提升控制算法與水下探測成像穩(wěn)定性,為機器人在惡劣水環(huán)境下水下作業(yè)提供更加穩(wěn)定的控制體系,實現(xiàn)精確、有效的操控。
4 結語
綜上所述,有纜遙控水下機器人依靠自身的靈活性可以代替潛水員完成諸如未知水況的急性作業(yè)需求,水質惡劣地域的垃圾治理,有毒有害污染物的清除等許多水下工作,并在水利水電工程領域的應用中已經(jīng)嶄露頭角,通過所搭載的聲吶和攝像頭,可對閘門、消力池、大壩壩體等設施進行全方位的檢測與清理,大大提升了工作效率與降低了工作風險。但綜合目前各方面的技術來看,水下環(huán)境復雜多變、水質漩渦等因素均會影響水下機器人的操作,離有纜遙控水下機器人在水利水電工程大規(guī)模的應用仍有一定距離,需要進一步提升相關技術,拓寬其使用場景。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
