采煤機滾筒自動調(diào)高控制系統(tǒng)優(yōu)化技術(shù)
2021-08-20 08:54:06楊亞東
機械工程與自動化 2021年3期
楊亞東
(太重煤機有限公司 礦山采掘裝備及智能制造國家重點實驗室,山西 太原 030032)
0 引言
地下煤層的地質(zhì)賦存狀況變化較大,同一煤層在開采過程中的厚度、傾角等存在較大變化,為最大程度地采收當(dāng)前工作面的煤炭資源,且避免滾筒截割煤巖,要求滾筒高度依據(jù)當(dāng)前位置的煤層狀況進行及時調(diào)整。調(diào)整方式分為兩種,即采煤機司機手動調(diào)整和控制系統(tǒng)自動調(diào)整。前者對司機的經(jīng)驗、操作熟練度等要求較高,穩(wěn)定性較差;后者可利用新的采煤工藝技術(shù)實現(xiàn)滾筒高度的自動化快速調(diào)整,因此該技術(shù)成為采煤機自動控制研究的熱點。
采煤機實際工況復(fù)雜多變,因此要求控制系統(tǒng)在時變性和非線性條件下仍具有良好的控制穩(wěn)定性。目前常用的PID閉環(huán)反饋算法可一定程度滿足穩(wěn)定性要求,但其控制參數(shù)仍依賴于人為經(jīng)驗設(shè)定,可能因參數(shù)設(shè)置不當(dāng)而出現(xiàn)控制不穩(wěn)定現(xiàn)象[1-3],因此仍需對常規(guī)的滾筒自動調(diào)高控制系統(tǒng)進行優(yōu)化,本文將對此進行研究。
1 滾筒自動調(diào)高系統(tǒng)組成及原理
采煤機滾筒調(diào)高系統(tǒng)主要由液壓系統(tǒng)、電氣系統(tǒng)、檢測裝置和機械執(zhí)行機構(gòu)等組成,如圖1所示。其中,液壓系統(tǒng)包括閥組、泵、電機等,電氣控制系統(tǒng)包括PID控制器、D/A及A/D轉(zhuǎn)換器、功率放大器等,檢測裝置采用線性傳感器,機械執(zhí)行機構(gòu)包括調(diào)高油缸、擺臂等[4-6]。
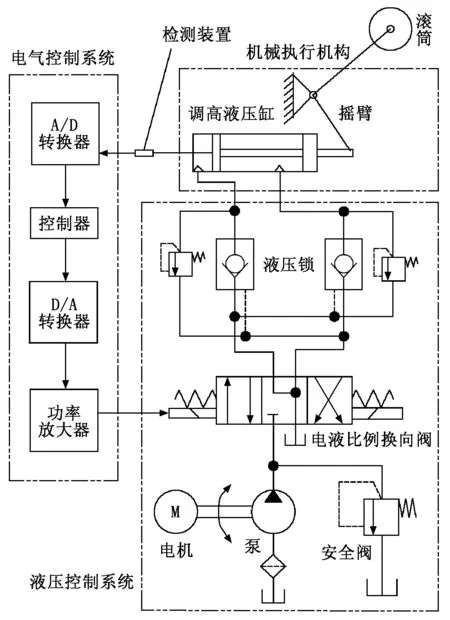
圖1 采煤機滾筒自動調(diào)高系統(tǒng)組成示意圖
自動調(diào)高控制原理如下:控制器接收外部調(diào)整指令,經(jīng)過D/A轉(zhuǎn)換將數(shù)字控制信號放大后作用在電液比例閥相應(yīng)位置的電磁鐵上,控制閥芯按指定數(shù)值位移,然后液壓泵將高壓乳化液注入閥芯移動后形成液壓管路,并進入調(diào)高液壓缸的相應(yīng)腔體內(nèi),控制油缸桿伸出或縮回,滾筒高度相應(yīng)調(diào)整,同時,油缸內(nèi)的線性傳感器將位移信號傳回電氣控制系統(tǒng),經(jīng)A/D轉(zhuǎn)換后進入控制器,控制器將實際位移信號與輸入位移指令進行對比,得出位移偏差,然后經(jīng)過PID處理后再次輸出控制信號,閥芯微動,滾筒位置做出微調(diào)。上述過程動態(tài)進行,由此可保證滾筒調(diào)高過程的自動化和穩(wěn)定性。
2 自動調(diào)高控制系統(tǒng)數(shù)學(xué)模型
2.1 控制原理
根據(jù)上述自動調(diào)高控制原理,可繪制滾筒調(diào)高系統(tǒng)控制原理圖,如圖2所示。在此基礎(chǔ)上,還需求取各控制環(huán)節(jié)的數(shù)學(xué)傳遞函數(shù),為后續(xù)建模研究提供基礎(chǔ)。
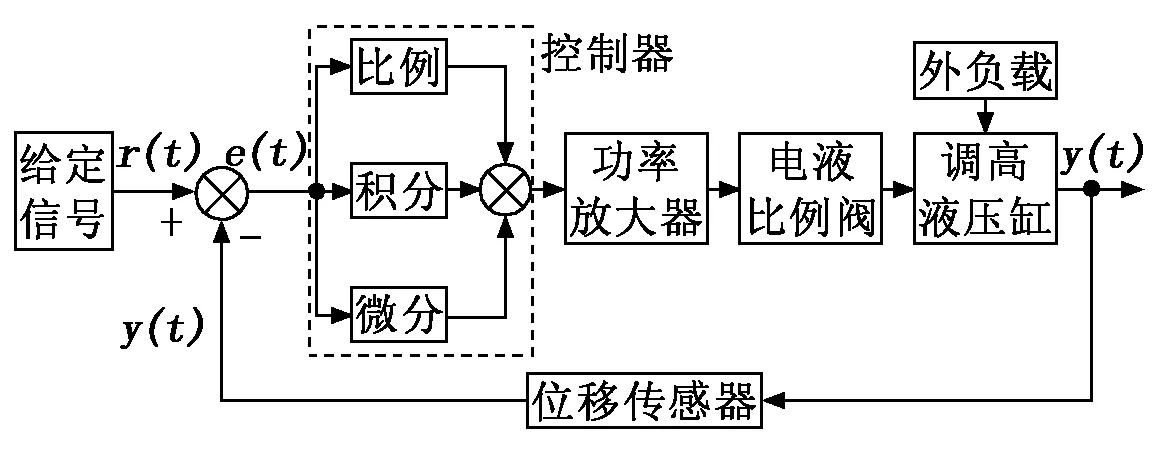
圖2 滾筒調(diào)高系統(tǒng)控制原理圖
2.2 傳遞函數(shù)模型
(1) PID控制器。PID控制算法種類較多,相應(yīng)傳遞函數(shù)也不相同,需根據(jù)受控系統(tǒng)特性進行選擇。首先以常規(guī)PID算法為例,其傳遞函數(shù)如式(1)所示:
(1)
其中:Kp為常規(guī)PID算法的比例系數(shù);Ti、Td分別為積分和微分常數(shù)。Kp、Ti、Td三個參數(shù)一般需根據(jù)經(jīng)驗進行設(shè)定。
(2) 功率放大器。由于控制器輸出功率較小,因此需通過功率放大器將輸出的電壓信號按比例放大為電流信號,特定大小的電流作用在電液比例閥的電磁鐵上產(chǎn)生磁力,并控制閥芯按比例位移值移動。由于該環(huán)節(jié)主要是通過比例運算進行功率放大,因此其傳遞函數(shù)表示如下:
G1=Km.
(2)
其中:Km為功率放大系數(shù)。
(3) 電液比例換向閥。相比于調(diào)高液壓缸,電液比例換向閥的響應(yīng)速度更快,頻率更高,其在控制系統(tǒng)中的作用類似于比例環(huán)節(jié),因此該元件的傳遞函數(shù)如下:
G2=Ksv.
(3)
其中:Ksv為比例閥增益系數(shù)。
(4) 閥控調(diào)高液壓缸。閥控非對稱調(diào)高液壓缸是控制系統(tǒng)的重要組成部分,假設(shè)系統(tǒng)供液的壓力、溫度、密度均恒定不變,回液壓力為零,且換向閥閥口為紊流,液壓缸各處泄漏為層流,則該部分傳遞函數(shù)表示如下:
(4)
其中:Kq為流量增益系數(shù);Xv為換向閥閥芯位移值,mm;Am為非對稱液壓缸兩腔的平均面積,mm2;Kce為總流量系數(shù);A1為非對稱液壓缸無桿腔面積,mm2;Vt為液壓缸的等效容積,mm3;βe為壓力介質(zhì)的體積彈性模量;FL為外負(fù)載力,N;ωh為液壓缸的固有頻率,Hz;ξh為液壓缸的阻尼比。
(5) 位移傳感器。位移傳感器安裝在液壓缸活塞尾部,一般采用磁致伸縮式,可將活塞的位移信號轉(zhuǎn)化為電壓信號輸出,其響應(yīng)速度較快,可簡化處理為比例環(huán)節(jié),傳遞函數(shù)表示如下:
G4=Kf.
(5)
其中:Kf為傳感器增益。
3 模糊PID優(yōu)化控制算法
對于具備非線性和時變性特點的系統(tǒng),若要獲得穩(wěn)定的控制性能,需對PID參數(shù)進行動態(tài)調(diào)整,而模糊控制算法可滿足此要求。
3.1 模糊PID控制原理
模糊PID控制以偏差e和偏差變化率ec作為輸入信號,然后利用既定的模糊控制規(guī)則,對PID算法中的Kp、Ti、Td三個參數(shù)進行修正,最終輸出動態(tài)修正后的控制信號,由此可保證PID控制器時刻處于最優(yōu)工作狀態(tài)。
對于采煤機調(diào)高控制系統(tǒng),可將滾筒邊緣與頂板巖石之間的距離作為偏差信號e,并將其變化率ec作為信號,然后輸入模糊控制器中,模糊控制器將PID算法參數(shù)的調(diào)整量ΔKp、ΔTi、ΔTd作為輸出,并分別輸入至比例-積分-微分控制器中,由于檢測信號不斷更新,因此可獲得動態(tài)修正的控制信號輸出,如圖3所示。
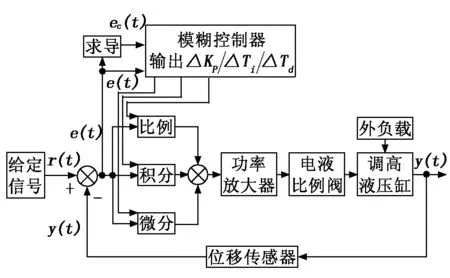
圖3 模糊PID優(yōu)化控制原理圖
3.2 參數(shù)調(diào)整原則
模糊控制器設(shè)計中,為保證控制性能滿足滾筒調(diào)高生產(chǎn)要求,對參數(shù)Kp、Ti、Td的調(diào)整應(yīng)遵循以下原則:
(1) 當(dāng)輸入信號值e偏大時,說明滾筒高度過低,需要快速調(diào)高滾筒,且避免過大超調(diào)。因此,應(yīng)將比例常數(shù)Kp取較大值,以提高相應(yīng)速度;積分常數(shù)Ti取極小或零值,即取消積分功能,以保證較小的超調(diào)量;微分常數(shù)Td取中值,避免由于值過大而快速微分飽和。
(2) 當(dāng)輸入信號值e較小時,說明滾筒與頂板距離較小,此時需保持滾筒高度和調(diào)高系統(tǒng)的穩(wěn)定性和抗干擾能力,避免振蕩,因此應(yīng)將Kp和Ti取較大值。Td的取值應(yīng)參考偏差變化率ec的大小,當(dāng)ec較小時,Td取較大值,反之,Td取較小值。
(3) 當(dāng)輸入信號e和ec均處于中等水平時,為保證獲得適當(dāng)?shù)捻憫?yīng)速度,并減小控制結(jié)果的超調(diào)量,Kp應(yīng)取值偏小,Ti、Td取值應(yīng)適中。
4 仿真分析
根據(jù)上述研究結(jié)果,利用MATLAB/Simulink軟件分別建立滾筒調(diào)高控制系統(tǒng)模型,包括常規(guī)PID算法和模糊PID優(yōu)化算法兩種,具體仿真結(jié)果如下。
4.1 系統(tǒng)響應(yīng)
為對比兩種算法對系統(tǒng)響應(yīng)速度和超調(diào)量的影響,分別給定相同的目標(biāo)階躍信號,仿真時間10 s,相應(yīng)調(diào)高油缸位移響應(yīng)曲線如圖4所示。由圖4可知:模糊PID算法的響應(yīng)速度更快,約1.5 s即達到系統(tǒng)穩(wěn)定,超調(diào)量也更小,最大超調(diào)量僅為0.11;而常規(guī)PID算法的對應(yīng)參數(shù)分別為3.9 s和0.22。由此可知,相比于常規(guī)PID控制,模糊PID控制系統(tǒng)的響應(yīng)速度和穩(wěn)定性都更佳。
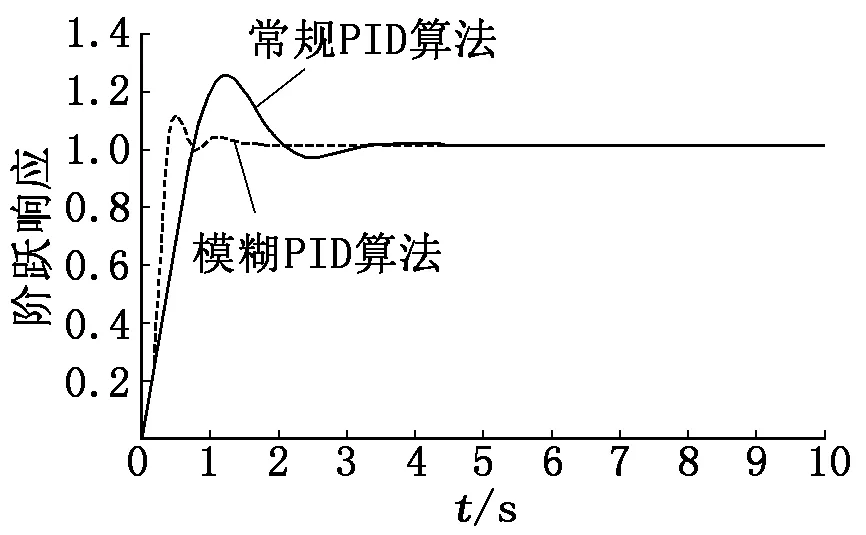
圖4 不同PID算法對系統(tǒng)的響應(yīng)
4.2 抗負(fù)載擾動能力
為對比兩種算法在外負(fù)載擾動下的抗干擾能力,在前述階躍信號基礎(chǔ)上,6 s時將外負(fù)載由200 kN突變至400 kN,響應(yīng)曲線如圖5所示。由圖5可知:模糊PID算法可在1.6 s內(nèi)快速恢復(fù)穩(wěn)定,且波動幅度較小,而常規(guī)PID算法的平衡時間達到2.2 s。因此說明模糊PID算法對負(fù)載較大擾動工況有良好的適應(yīng)性。

圖5 不同PID算法對抗負(fù)載擾動能力的響應(yīng)
5 結(jié)論
(1) 相比于常規(guī)PID算法,模糊PID優(yōu)化算法可對PID算法中的Kp、Ti和Td三個參數(shù)進行在線動態(tài)調(diào)整,從而適應(yīng)滾筒調(diào)高控制系統(tǒng)的非線性、時變性、強擾動等特性,使控制過程更穩(wěn)定。
(2) 系統(tǒng)建模仿真結(jié)果顯示,模糊PID優(yōu)化算法比常規(guī)PID算法有更快的響應(yīng)速度和更小的超調(diào)量,且抗負(fù)載干擾能力更強,能快速達到系統(tǒng)穩(wěn)定狀態(tài),因此更加適合滾筒調(diào)高自動控制。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
防爆電機(2022年1期)2022-02-16 01:14:06
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
河南科技(2014年18期)2014-02-27 14:14:58