基于自適應模型預測算法的光伏并網逆變器無功電壓控制策略研究
2021-08-23 12:37:04李德鑫王佳蕊張家郡莊冠群孫振奧
可再生能源 2021年8期
李德鑫,王佳蕊,張家郡,莊冠群,孫振奧
(1.國網吉林省電力有限公司 電力科學研究院,吉林 長春 130000;2.東北大學 信息科學與工程學院,遼寧沈陽 110819)
0 引言
分布式光伏接入電網后,改變了原電網的潮流分布,導致并網點(PCC)電壓升高,隨著滲透率提高而更加嚴重[1]。德國電網規定,分布式電源并網點電壓不得超過額定電壓的3%。我國相關標準也對并網點電壓偏差作了規定[2]。
隨著分布式電源的發展,并網點的無功電壓控制逐漸引起學者關注。文獻[3],[4]描述了多種電壓控制方法,指出無功電壓控制是目前最經濟有效的電壓控制方法。文獻[5]~[7]介紹了無功電壓控制的原理和可行性。文獻[8]對德國電網規范推薦的3種無功電壓控制方法進行了比較研究,指出各自的優缺點和適用場合。文獻[9],[10]提出了無功注入控制策略,實現電網故障期間電壓恢復,但未涉及線路阻抗特性和功率注入對公共耦合點電壓恢復效果的分析。文獻[11]通過無功功率來調節風電場并網點電壓或提高電壓可靠性的算法,該算法對光伏電站中的無功電壓控制有很大的參考意義。目前的控制方法仍然不夠智能,在一些特殊情況下會產生電壓越限或收斂過慢的情況。文獻[12]~[14]介紹了模型預測算法在風電場中的應用,通過無功輸出控制風電場并網點電壓,或提高電壓穩定性。文獻[15]將模型預測算法應用到分布式電源的有功無功調度中。文獻[16]對模型預測算法的采樣時間進行研究,指出采樣時間過短會導致CPU的運算量太大;采樣時間過長,不利于跟蹤模型的變化,所以采樣時間的選擇要根據實際模型可能存在的變數速率選取。文獻[17],[18]研究了模型預測算法在電壓源型逆變器中的應用,結果表明,模型預測算法比傳統PI控制有更好的動態響應。文獻[19],[20]研究指出,在不影響控制效果的前提下,模型預測算法可以降低逆變器的開關頻率,進而減小開關損耗,提高逆變效率。
1 現有無功電壓控制策略
目前,常用的無功電壓控制方法主要包括固定功率因數控制法(cosφ)、功率因數-有功控制法[cosφ(P)]、無功功率-電壓控制方法[Q(V)]3種。
1.1 開環無功電壓控制策略
cosφ法和cosφ(P)法均為開環的控制方法,其中:cosφ法以固定功率因數吸收一定的感性無功;cosφ(P)法根據逆變器輸出的有功功率來調整功率因數或無功吸收量,如圖1所示。

圖1 cosφ(P)函數曲線示意圖Fig.1 Diagram of cosφ(P)method
開環控制方法可以根據有功輸出量P快速計算出無功吸收量Q,由于沒有建立無功Q和并網點電壓VPCC的直接關系,所以不能精準控制電壓,在本地負載發生變化時,并網點電壓控制效果會有明顯偏差。
1.2 閉環無功電壓控制策略
Q(V)法為典型的閉環控制算法,原理如圖2所示。根據實測并網點電壓VPCC實時調整無功輸出Q,最終保證電壓在允許范圍內。
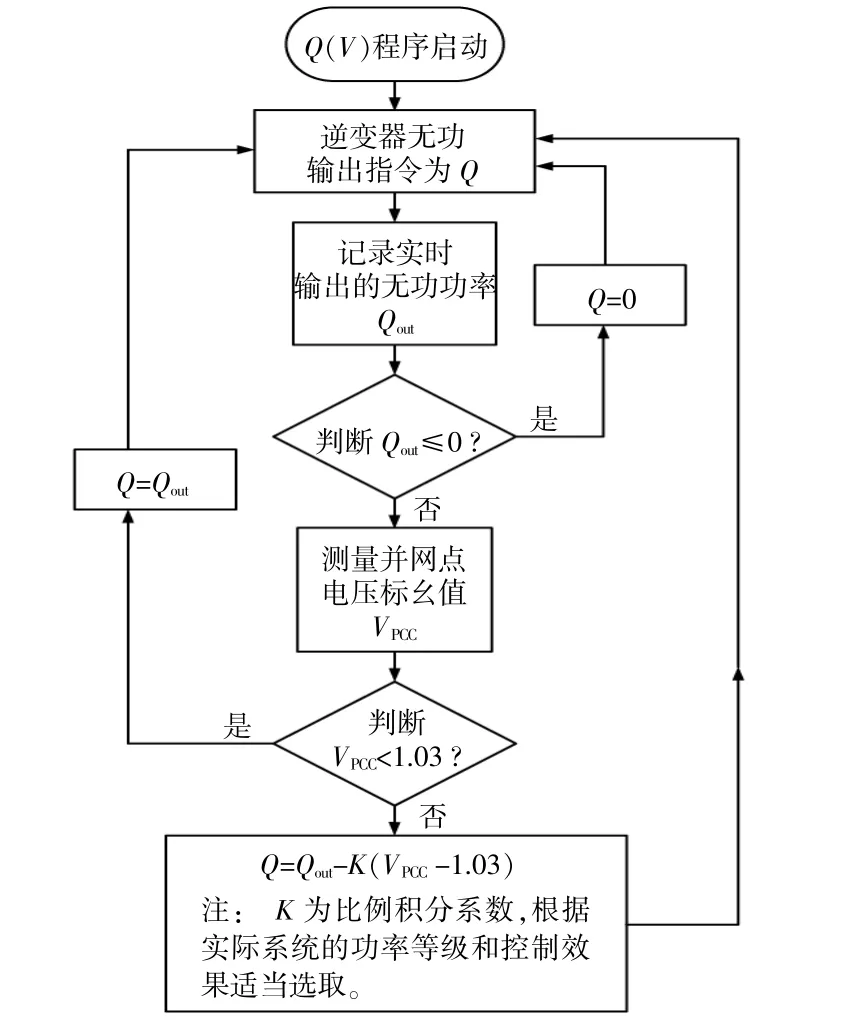
圖2 Q(V)法流程圖Fig.2 Flow chart of Q(V)method
由于建立了無功吸收量Q和并網點電壓VPCC的直接關系,所以閉環控制方法在光照和負載變化的情況下,都可以很好地控制并網點電壓。然而,由于電力系統結構負載復雜,且參數時變,傳統閉環控制中的控制器(如PI控制器)會產生收斂時間長的問題。
2 自適應模型預測的無功電壓控制算法
2.1 常規模型預測算法
模型預測算法是一種智能控制算法,它的總體思路是滾動優化[12]。根據優化指標,考慮當前時刻被控對象的預測模型,給出當前時刻的控制量u(k),控制量同時進入實際被控對象和被控對象的預測模型,分別得到下一時刻實際輸出y(k+1)和預測輸出y*(k+1),兩者作差得到誤差量c(k+1),該誤差量作為修正下一時刻被控對象預測模型的依據,如圖3所示[13]。
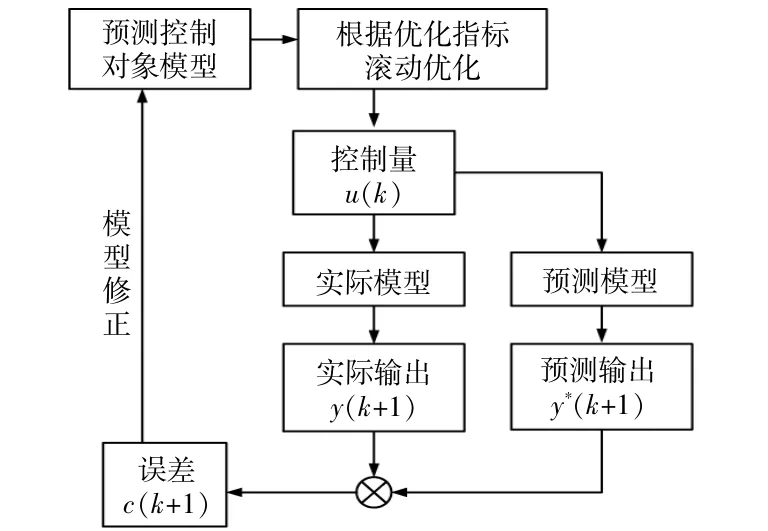
圖3 模型預測算法Fig.3 Model prediction algorithm
電網模型的相關參數會隨著分布式電源和負載的變化而改變,而模型預測算法恰恰能通過滾動優化實時修正模型,并保持最佳控制狀態。近年來模型預測算法在智能微網控制中有了越來越多的應用。
2.2 光伏并網逆變器無功電壓控制模型
分布式并網光伏逆變器通常工作在“本地消納,余量上網”模式下,模型如圖4所示。
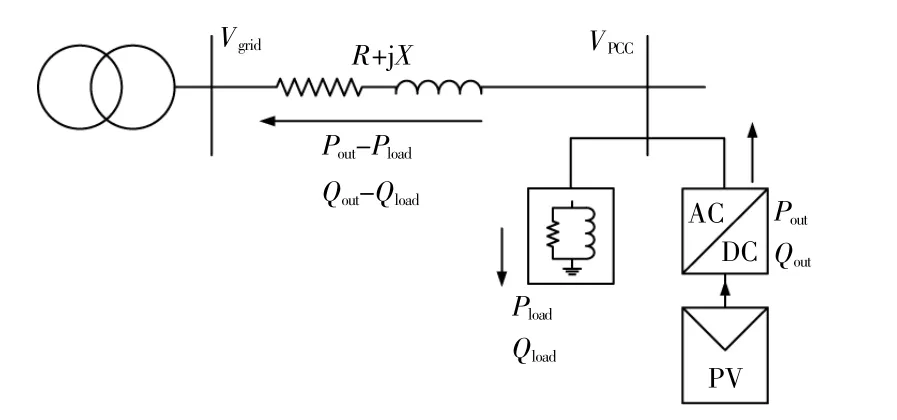
圖4 無功電壓控制模型Fig.4 Model of reactive power and voltage control
圖中:Vgrid為理想電壓源;R,X為等效線路阻抗;Pload,Qload為本地有功、無功負載;Pout,Qout為逆變器輸出的有功、無功功率,當Qout為負時,逆變器吸收感性無功功率。
圖4模型中,并網點電壓升高ΔV為
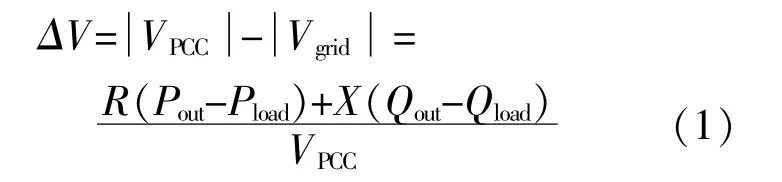
式中:ΔV為電壓升高上限,為定值;通常分布式逆變器工作在MPPT模式,Pout直接受到光照影響,在不考慮棄光的情況下是不可控的;Pload,Qload為本地負載的有功、無功,逆變器同樣不能控制,但可以通過傳感器或其他通信手段將此信息傳送到逆變器內參與運算;由線路實際阻抗、線路拓撲結構組成,并受到其他節點的負載情況影響,R,X在本地逆變器也無法控制;VPCC為并網點電壓,可以由逆變器測量得到,變化范圍比較小。通常,逆變器都可以四象限運行,即在滿足視在功率上限的基礎上,逆變器可以輸出任意的Qout,所以Qout為逆變器唯一可以完全控制的量,無功電壓算法也正是通過控制Qout來滿足電壓升高上限。
各參數特點如表1所示。
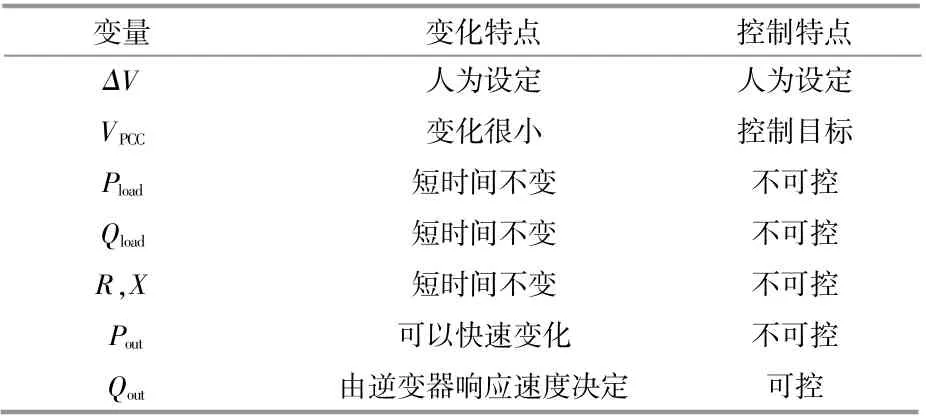
表1 各個參數的特點Table 1 Characteristics of each parameter
根據表1,將式(1)變形后可得:

令:
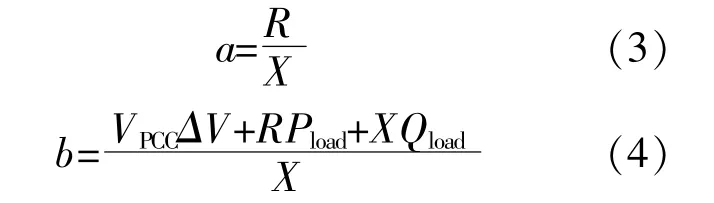
則式(2)可等效為

式中:a,b為系統的結構參數。
a,b的所有參數均為不變的量或短時間內為恒量,因此只要準確得到a,b值,就可以計算出無功吸收量Q,并將ΔV控制在限定范圍內。
2.3 自適應模型預測算法
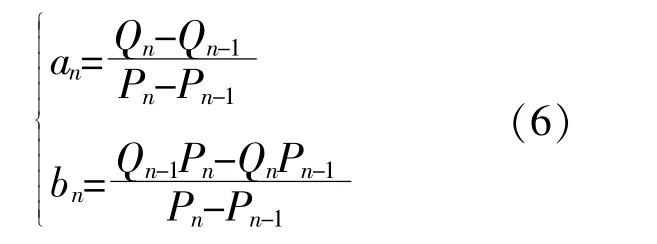
用滾動優化算法計算當前時刻的an和bn,將式(5)等效為直線解析式,采用當前時刻滿足ΔV約束條件的(Pn,Qn)和上一時刻滿足ΔV約束條件的(Pn-1,Qn-1)求解待定系數[22]~[26],具體表達式為
算法要考慮逆變器通過吸收感性無功來控制ΔV不越限,如果并網點電壓沒有達到ΔV上限,逆變器不須要輸出感性無功來達到ΔV上限,具體方法如圖5所示。
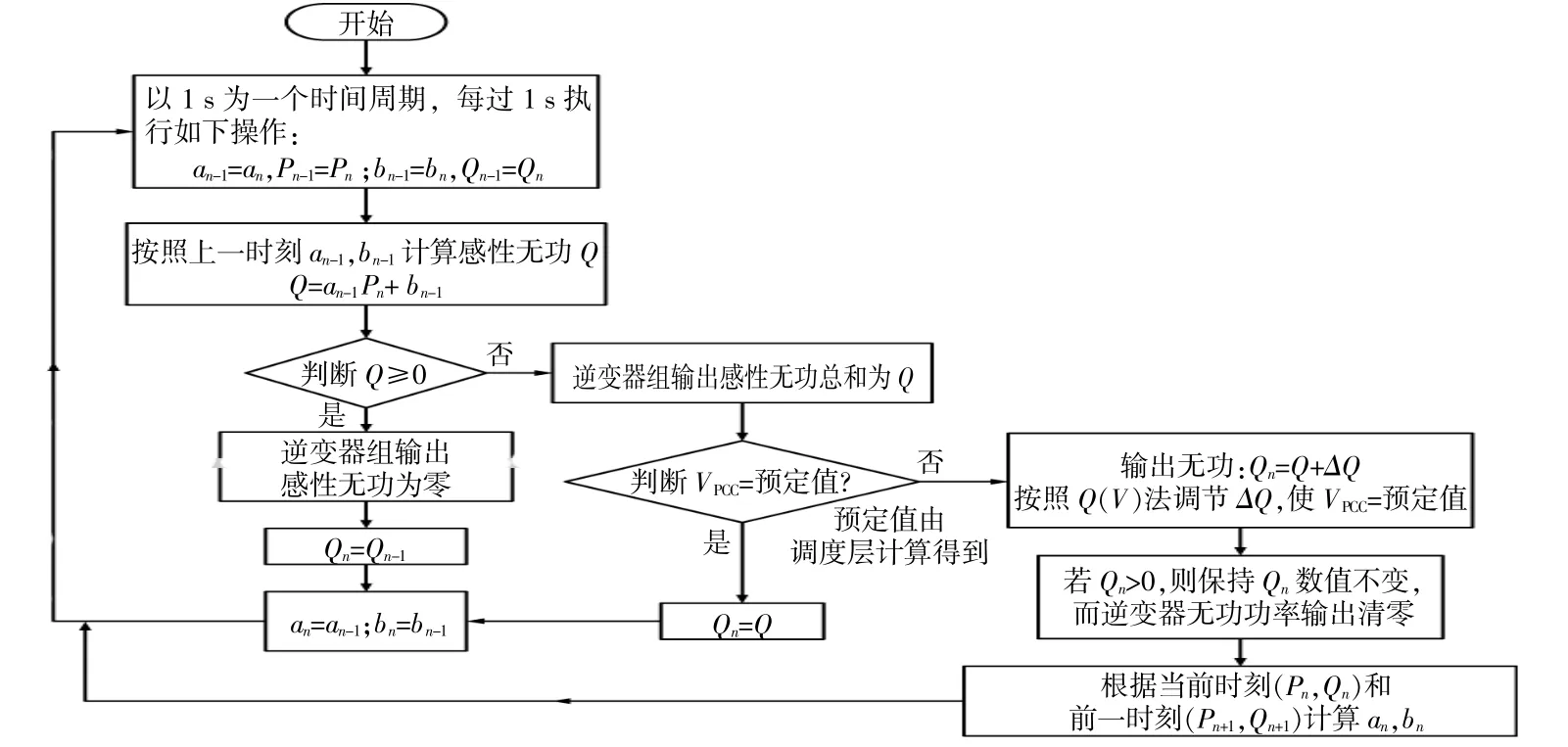
圖5 基于自適應模型預測的無功電壓控制策略Fig.5 Reactive power and voltage control strategy based on self-adapted model prediction control method
以1 s為一個時間周期,每個時間周期開始時,假設模型沒有發生變化,根據上一個時間周期的模型參數an-1,bn-1和本時刻的有功功率輸出Pn,可以計算出逆變器在模型不變的情況下,輸出Qout。逆變器輸出無功的目的是降低VPCC,所以應該吸收感性無功,即無功輸出為負;計算得到輸出Qout為正值時,說明此刻有功輸出較小,尚不足以引起VPCC電壓升高越限,所以不需要吸收無功,將上一時刻的參數直接刷新成為本時刻的參數,重回到算法的起點。如果計算得到應該吸收Q為負值,則說明逆變器輸出的有功功率引起了電壓升高越限,須要吸收感性無功,將ΔV控制在規定范圍之內,逆變器按照計算值輸出Qout。如果在誤差允許范圍內,VPCC等于調度層給出的預定值,即ΔV剛好沒有越限,那么說明電網模型確實沒有改變,此刻將逆變器的無功實際輸出作為Qn,并刷新結構參數,返回算法起點。
如果輸出無功Q,但是VPCC不等于預定值,無論其變大還是變小,都說明模型發生了變化,需要重新計算a,b。首先找到一個VPCC滿足預定值的Qn;按照Q(V)法,通過電壓反饋調節無功輸出,如果電壓超過上限,增加無功吸收量,如果電壓低于上限,減少無功吸收量,直至不吸收無功。得到Qn后,可以與當前時刻的有功輸出Pn構成一個點(Pn,Qn),與上一時刻對應的點(Pn-1,Qn-1)相加,按照式(6),二者共同參與計算,可以解出新的模型參數an,bn,然后回歸算法起點,完成一次循環。
3 仿真與實驗結果
3.1 仿真與實驗參數
按照圖4結構構件實驗平臺,并按照實際參數在Matlab/Simulink環境中搭建仿真平臺,驗證本文提出算法與傳統算法的控制效果。實驗和仿真主要參數如表2所示。其中在仿真過程中逆變器輸出功率某一時刻由10 kW階躍至12 kW;實物實驗中迫于逆變器功率上限,輸出功率有9 kW突變至8 kW。由于仿真和實驗網絡較小,引起ΔV升高不明顯,故指定VPCC上限為額定電壓的1.01 p.u.。
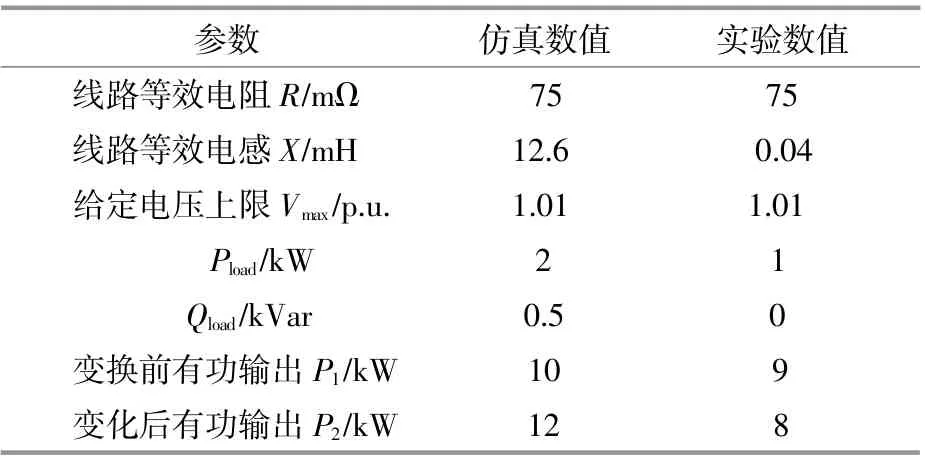
表2 仿真與實驗參數Table 2 Simulation and experimental conditions
3.2 仿真結果
Q(V)控制法、自適應模型預測算法的逆變器輸出有功、無功和電壓標幺值曲線如圖6,7所示。自適應算法主要參數通過系統自我修正,不必人為設定,而其他仿真條件參數與Q(V)法相同。
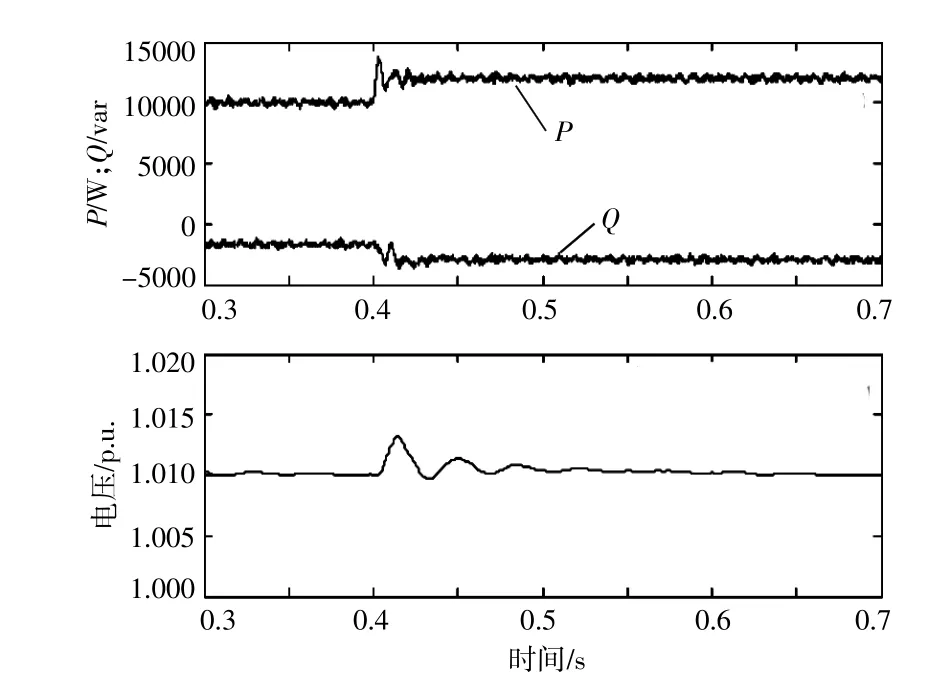
圖6 Q(V)法的仿真結果Fig.6 Simulation results of Q(V)method
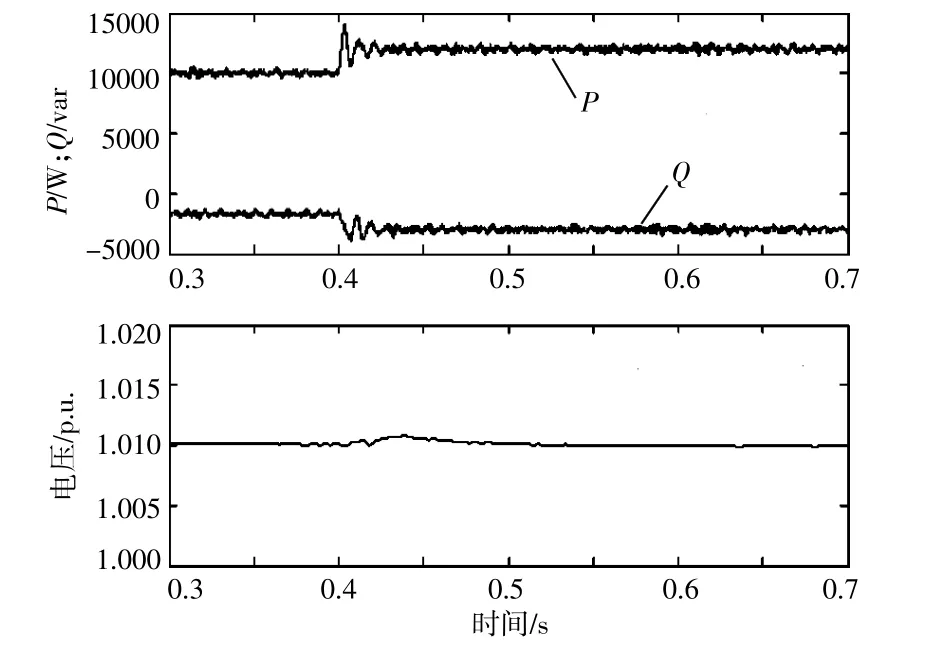
圖7 自適應模型預測算法仿真結果Fig.7 Simulation results of Self-adapted MPCmethod
由圖6,7可知:0.4 s,有功輸出從10 kW階躍至12 kW,應用Q(V)算法的電壓經過幾個波動后逐漸進入穩態。自適應模型預測算法校正準確后,可以看成一個開環控制,動態性能得到了大大提高,在有功發生突變時,自適應模型預測的無功電壓控制電壓超調明顯變小,收斂速度更快。
3.3 實驗結果
按照圖4和表2中的參數進行實驗,實驗平臺如圖8所示。
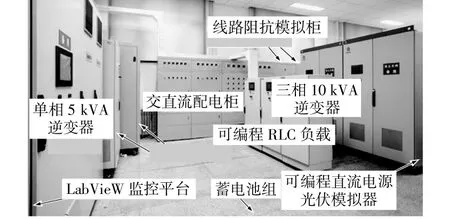
圖8 實驗平臺實物照片Fig.8 Physical picture of experiment platform
逆變器輸出有功功率為9 kW,并自動匹配適當的無功功率吸收量來控制電壓,以滿足在ΔV上限。某一時刻令并網有功階躍至8 kW,采用Q(V)法和模型預測算法的實驗結果分別如圖9,10所示。
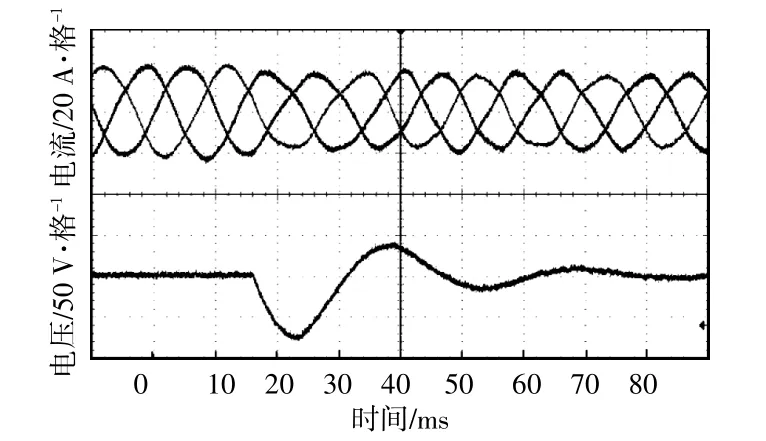
圖9 Q(V)法無功電壓結果Fig.9 Experimental results of Q(V)method
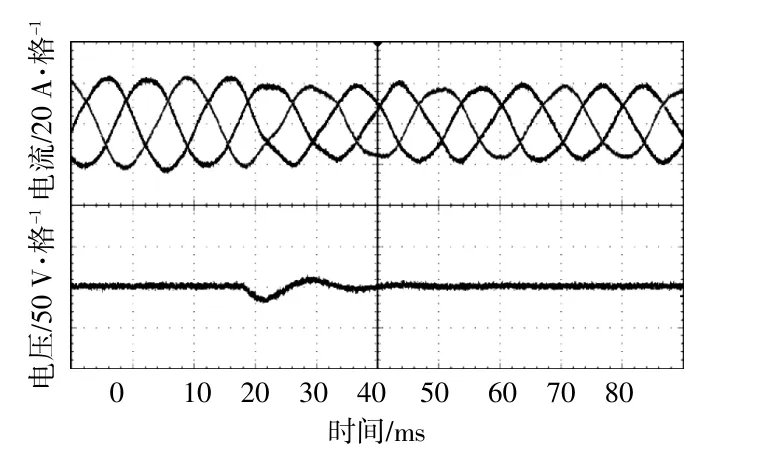
圖10 自適應模型預測算法結果Fig.10 Experimental results of self-adapted MPCmethod
由圖9,10可知:自適應模型預測算法的電壓超調量遠遠小于Q(V)法,前者大約是后者的1/4;自適應模型預測的響應時間比Q(V)法極大縮短,前者約一個工頻周期后電壓就不在振蕩,而后者持續振蕩超過3個工頻周期;在有功階躍的一段時間內,二者都須要調節有功和無功電流,所以在過渡周期存在一定的電流畸變。自適應模型預測算法在略多于一個工頻周期后,輸出電流就恢復了原來的電能質量,而Q(V)法經過3個工頻周期,輸出電流仍在變化。由實驗結果可以看出,在無功電壓控制方面,自適應模型預測控制算法的動態性明顯優于Q(V)法。
4 結束語
傳統無功電壓控制方法存在一定缺陷,本文建立光伏逆變器并網電壓物理和數學模型,引入自適應模型預測算法,在無功電壓控制模型加入自適應環節,形成自適應模型預測算法,通過滾動優化得到合適的結構參數。實驗結果表明,本文所提出的基于自適應模型預測算法的無功電壓控制策略,其響應速度和控制精度均優于Q(V)法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52