基于空地一體化在構(gòu)筑物三維重建中的應(yīng)用
2021-08-23 01:42:34鄭遠(yuǎn)楊
淮陰工學(xué)院學(xué)報(bào) 2021年3期
鄭遠(yuǎn)楊,劉 超,丁 濤,鄧 燁
(安徽理工大學(xué) 空間信息與測(cè)繪工程學(xué)院/礦山采動(dòng)災(zāi)害空天地協(xié)同監(jiān)測(cè)與預(yù)警安徽省教育廳重點(diǎn)實(shí)驗(yàn)室,安徽 淮南 232001)
目前,人工建模、激光雷達(dá)建模和傾斜攝影建模是主流的三維建模技術(shù)。人工建模通常采用大比例尺規(guī)劃圖結(jié)合3DMAX軟件進(jìn)行建模,并結(jié)合現(xiàn)狀照片進(jìn)行紋理貼圖,但該建模方法對(duì)于復(fù)雜構(gòu)筑物來說存在一定的困難,制作周期較長(zhǎng),人工干預(yù)較多,簡(jiǎn)言之費(fèi)時(shí)費(fèi)力,建模效果失真[1]。激光雷達(dá)獲取的點(diǎn)云數(shù)據(jù)量廣,點(diǎn)云特性穩(wěn)定,且對(duì)于點(diǎn)云處理方面已取得巨大進(jìn)步,現(xiàn)在已廣泛推進(jìn)三維重建利用激光雷達(dá)數(shù)據(jù)。張冬等[2]利用地面激光雷達(dá)對(duì)單株樹木進(jìn)行建模,通過不同算法提取枝干骨架和樹枝;賈雪等[3]利用海量點(diǎn)云數(shù)據(jù),基于鑲嵌法進(jìn)行三維重建,但該方法前期準(zhǔn)備工作時(shí)間較長(zhǎng),后期紋理貼圖困難。傾斜攝影測(cè)量技術(shù)可以獲取構(gòu)筑物頂部、側(cè)面信息,目前對(duì)于較大區(qū)域采用航攝影像三維建模,無(wú)人機(jī)成本較低,快捷靈活,可獲取大量目標(biāo)物數(shù)據(jù)。劉洋等[4]利用無(wú)人機(jī)影像數(shù)據(jù)進(jìn)行古建筑三維重建,通過規(guī)劃航線和貼近攝影測(cè)量結(jié)合方法,但該方法對(duì)手動(dòng)拍攝影像重疊度要求較高。
當(dāng)前研究多數(shù)在單體化建模,單一建模雖然簡(jiǎn)便快捷,建模效果快,但有所欠缺,存在人工修模、模型紋理模糊,目標(biāo)物存在空洞等問題。
無(wú)人機(jī)傾斜攝影測(cè)量從1個(gè)垂直角度和4個(gè)傾斜角度獲取地面物體的表面信息,從而得到目標(biāo)物的空間三維坐標(biāo)[5]。通過軟件處理獲取的影像,可快速實(shí)現(xiàn)地面建筑物的三維重建,然而受飛行高度和攝影角度限制,建立的模型在近地面會(huì)存在變形和拉花等問題,不能很好地滿足如今的建筑物精細(xì)化建模要求;近地面攝影測(cè)量技術(shù)通過非量測(cè)相機(jī)在地面拍攝照片,可解決無(wú)人機(jī)航拍無(wú)法拍攝的角度問題,根據(jù)二者各自的互補(bǔ),可以大大提高城市實(shí)景三維建模質(zhì)量。因此本文擬采用航空攝影測(cè)量結(jié)合地面照片方法進(jìn)行三維重建,經(jīng)實(shí)驗(yàn)該方法實(shí)際應(yīng)用效果較好。
1 基于攝影測(cè)量的三維重建方法概述
基于攝影測(cè)量的三維重建是根據(jù)雙目視覺原理,以攝像機(jī)為媒介獲取目標(biāo)物的二維影像,借助目前影像處理軟件提取相鄰圖像中的同名點(diǎn),再以同名點(diǎn)為匹配基元建立各圖像之間的對(duì)應(yīng)關(guān)系。經(jīng)處理軟件獲取精確的匹配關(guān)系后,再結(jié)合攝像機(jī)規(guī)定的內(nèi)外參數(shù)就可以得到空間點(diǎn)的三維坐標(biāo)導(dǎo)出的點(diǎn)云數(shù)據(jù),由點(diǎn)云數(shù)據(jù)構(gòu)建不規(guī)則三角網(wǎng)格模型,最后再根據(jù)紋理映射算法得到具有真實(shí)紋理信息的三維模型[6]。
三維建模的實(shí)質(zhì)為點(diǎn)云數(shù)據(jù)構(gòu)建TIN三角網(wǎng),并結(jié)合紋理算法附紋理信息至TIN三角網(wǎng)。傾斜攝影測(cè)量與地面拍照技術(shù)二者的本質(zhì)是融合生成點(diǎn)云數(shù)據(jù),最后構(gòu)建高精度三維模型。技術(shù)路線如圖1所示。
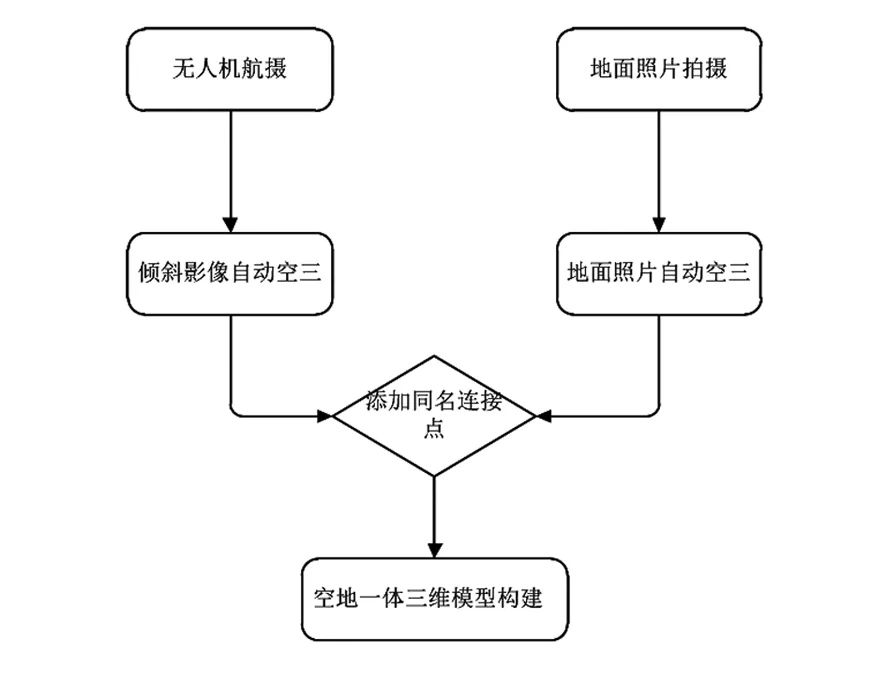
圖1 融合建模技術(shù)路線
獲取的無(wú)人機(jī)影像(地面照片)數(shù)據(jù)進(jìn)行空中三角測(cè)量前要進(jìn)行檢核,查看影像是否全部可用于三維重建,空中三角測(cè)量結(jié)束后,可查看空三質(zhì)量報(bào)告,其中包含關(guān)鍵點(diǎn)、連接點(diǎn)以及重投影誤差,一般主要查看重投影誤差是否在規(guī)定范圍內(nèi)即小于1個(gè)像素。區(qū)塊合并后進(jìn)行三維重建,將融合模型與掃描儀點(diǎn)云構(gòu)建的模型進(jìn)行3D比較,從而確定整體建模精度。
2 數(shù)據(jù)采集
2.1 無(wú)人機(jī)影像數(shù)據(jù)采集
當(dāng)前無(wú)人機(jī)行業(yè)快速發(fā)展,憑借其體積小、低成本、獲取數(shù)據(jù)量廣的優(yōu)勢(shì)在測(cè)繪領(lǐng)域被廣泛應(yīng)用[7-8]。利用無(wú)人機(jī)搭載的單鏡頭或多鏡頭,獲取測(cè)區(qū)各方位帶有POS信息的影像數(shù)據(jù),根據(jù)獲取的影像數(shù)據(jù)可建立接近于實(shí)景的三維模型[9]。
本實(shí)驗(yàn)采用大疆精靈4Pro無(wú)人機(jī),正常GPS定位工作時(shí),垂直懸停精度為±5 m,水平懸停精度為±1.5 m。無(wú)人機(jī)航攝飛行前,利用奧維地圖進(jìn)行目標(biāo)區(qū)裁取,并根據(jù)實(shí)驗(yàn)要求用飛行控制器規(guī)劃航線;為建立高質(zhì)量的三維模型,確保相鄰影像之間的重疊度,航向重疊度一般要求在60%~65%,最低不得小于53%,旁向重疊度一般要求為30%~40%,最小不得小于15%,若航向、旁向重疊度小于最低要求稱為航攝漏洞,需航攝外業(yè)補(bǔ)救[10]。本次航向重疊度和旁向重疊度設(shè)為90%,飛行高度為20 m,共采集136影像,均可進(jìn)行三維重建。
2.2 地面照片采集
地面拍照對(duì)象為拱形建筑物的底部和文字碑,底部數(shù)據(jù)由于無(wú)人機(jī)規(guī)劃的航線難以獲取,若采用低空環(huán)繞飛行,由于自身的避障系統(tǒng),使得環(huán)繞拍攝也無(wú)法獲取完整的底部數(shù)據(jù);文字碑具有特殊意義,航攝高度為20 m,使得字體難以看清,因此采用地面拍照,本次地面拍照采用Iphone11手機(jī),廣角拍攝和六鏡式鏡頭廣角拍攝,且廣角鏡頭具備光學(xué)圖像防抖功能,符合本次實(shí)驗(yàn)拍攝相機(jī)要求。如圖2所示。
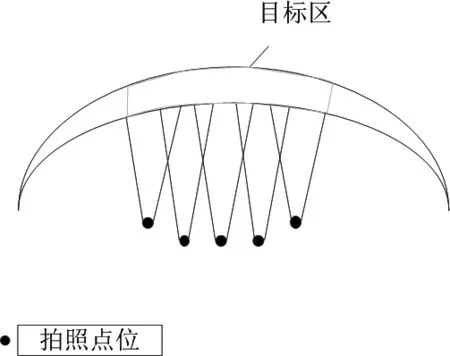
圖2 地面照片拍照示意圖
由于手機(jī)和無(wú)人機(jī)屬于二種不同的設(shè)備,內(nèi)部參數(shù)設(shè)置不同,為確保整體建模質(zhì)量,無(wú)人機(jī)航攝和地面拍照應(yīng)同一時(shí)段分別進(jìn)行,且手機(jī)取景采用環(huán)繞式拍照,盡量每隔15°拍攝一次,確保照片重疊度[11],采集底部照片33張,文字碑照片14張,共采集47張照片,均可進(jìn)行三維重建。
3 影像數(shù)據(jù)與地面照片融合三維重建
實(shí)現(xiàn)航攝影像與地面照片融合建模的關(guān)鍵是將兩組照片進(jìn)行聯(lián)合空中三角測(cè)量。聯(lián)合航攝影像與地面照片可利用過渡影像來實(shí)現(xiàn),即采用少量重疊度極高的影像來連接兩組照片,但此方法需要利用無(wú)人機(jī)下降不同高度采集影像來連接,若高度下降不均勻、照片采集角度偏差較大都會(huì)影響融合效果,因此本次采用連接點(diǎn)方法進(jìn)行照片聯(lián)合,無(wú)需下降無(wú)人機(jī)高度采集連接照片,本文詳細(xì)建模方法如圖3所示。
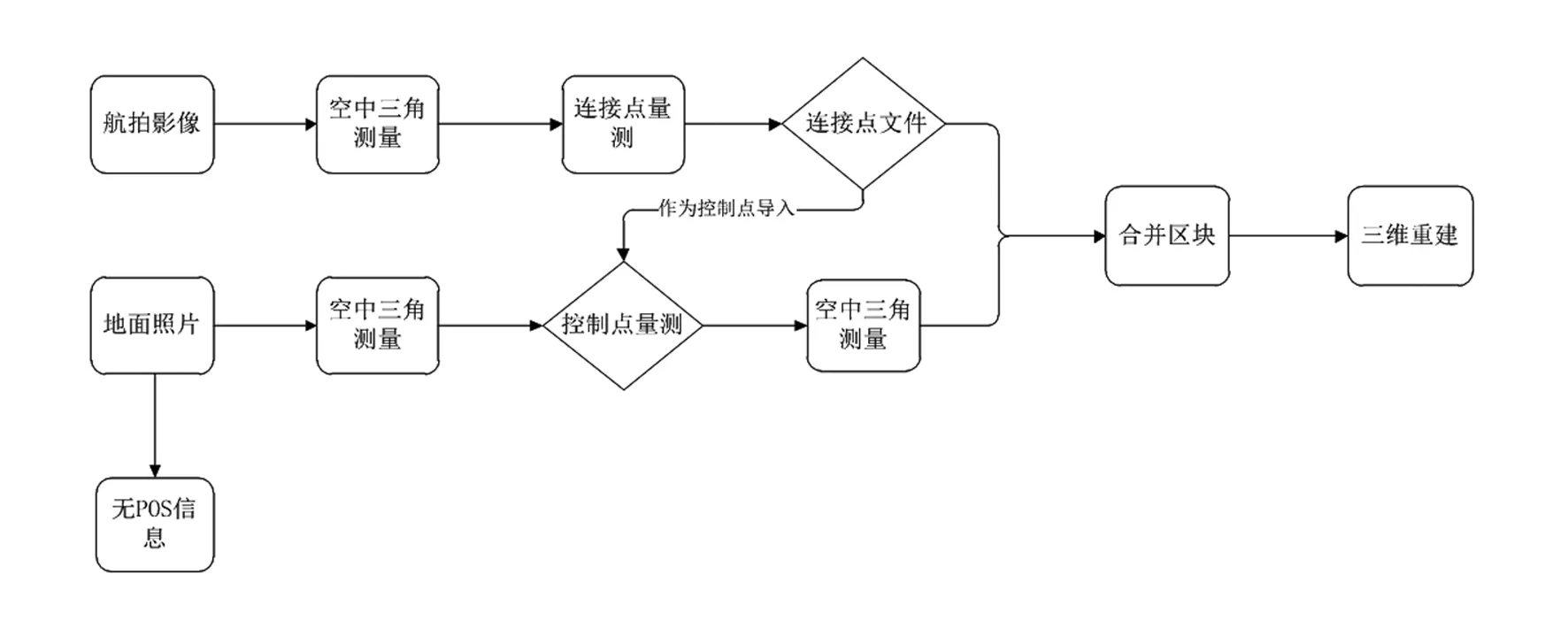
圖3 影像數(shù)據(jù)與地面照片融合建模流程圖
3.1 區(qū)域網(wǎng)傾斜空三加密
本實(shí)驗(yàn)采用單鏡頭無(wú)人機(jī)獲取影像數(shù)據(jù),使用Context Capture快速實(shí)現(xiàn)實(shí)景三維建模,該軟件的優(yōu)勢(shì)為全自動(dòng)化處理影像數(shù)據(jù)。首先在該軟件創(chuàng)建一個(gè)區(qū)塊block1,將影像數(shù)據(jù)導(dǎo)入直接進(jìn)行多視影像聯(lián)合平差傾斜空三加密,最終獲得帶有真實(shí)三維坐標(biāo)的空三結(jié)果。單一無(wú)人機(jī)共生成42 522個(gè)連接點(diǎn),平均每張影像提取25 272個(gè)關(guān)鍵點(diǎn),重投影誤差為0.48個(gè)像素。
3.2 區(qū)域網(wǎng)地面照片空三加密
采用Iphone11手機(jī)獲取的地面照片無(wú)POS信息。在Context Capture中創(chuàng)建block2區(qū)塊,手機(jī)拍攝的照片中會(huì)含有無(wú)效影像,因此進(jìn)行空三解算前需進(jìn)行照片檢查,隨后進(jìn)行地面照片空三加密解算,獲得一組無(wú)任何真實(shí)三維信息的空三結(jié)果。地面照片底部連接點(diǎn)共生成12 260個(gè)連接點(diǎn),重投影誤差為0.7個(gè)像素,文字碑生成2986個(gè)連接點(diǎn),重投影誤差為0.74個(gè)像素。
3.3 添加連接點(diǎn)
采用連接點(diǎn)進(jìn)行照片聯(lián)合,需保證每個(gè)連接點(diǎn)至少在3~5張影像上。該方法具體為:利用無(wú)人機(jī)影像進(jìn)行空中三角測(cè)量,隨后利用空三結(jié)果選擇連接點(diǎn),確保選擇的連接點(diǎn)影像與地面照片相對(duì)應(yīng),連接點(diǎn)選擇至少3個(gè),每個(gè)連接點(diǎn)在3張以上影像中,選擇結(jié)束后,導(dǎo)出連接點(diǎn)文件為.txt格式;將選擇好的連接點(diǎn)文件導(dǎo)入地面照片中選擇對(duì)應(yīng)點(diǎn),此時(shí)導(dǎo)入的連接點(diǎn)作為控制點(diǎn);最后將兩組空三結(jié)果合并區(qū)塊進(jìn)行三維重建,連接點(diǎn)融合結(jié)果如圖4所示。
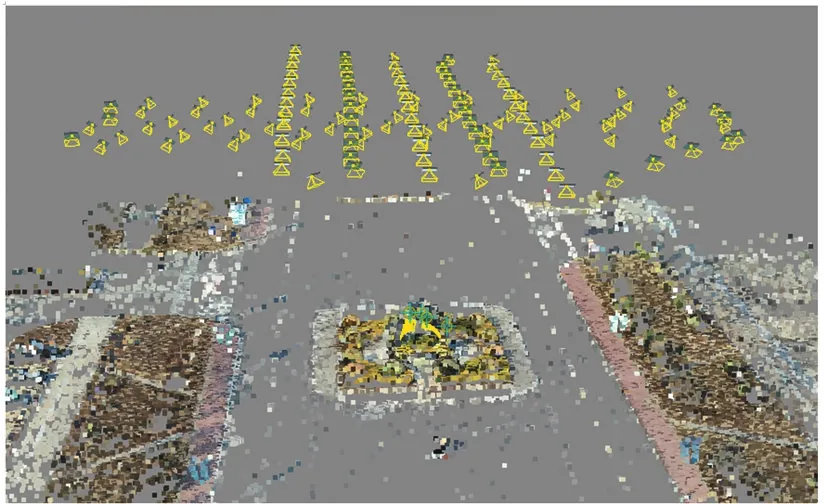
圖4 融合空中三角測(cè)量結(jié)果
本文控制點(diǎn)點(diǎn)數(shù)為3個(gè),其三維誤差的RMS為0.016 m、三維水平誤差的RMS為0.016 m、三維垂直誤差的RMS為0.002 m。
3.4 空地融合自動(dòng)三維實(shí)景建模
實(shí)驗(yàn)獲取大量的影像數(shù)據(jù),生成密集點(diǎn)云較多,利用Context Capture建模時(shí),由于計(jì)算機(jī)內(nèi)存為16RAM,經(jīng)分析計(jì)算所需內(nèi)存大小將分塊建模,共生成16個(gè)瓦塊進(jìn)行TIN模型的構(gòu)建,最后根據(jù)構(gòu)建好的TIN模型進(jìn)行紋理映射,得到真實(shí)三維模型,如圖5所示。
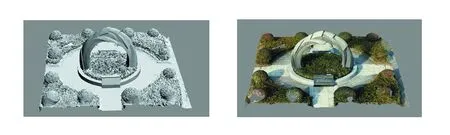
(a)融合構(gòu)筑物白膜; (b)融合構(gòu)筑物模型
將未添加地面照片模型與添加地面照片所建三維模型進(jìn)行對(duì)比,可以清晰看出因航攝帶來建模空洞的修補(bǔ)以及文字碑字體更加清晰,如圖6所示。

(a)無(wú)添加地面照片

(b)添加地面照片
4 精度分析
融合照片數(shù)據(jù)精度決定了本次三維重建模型的質(zhì)量。掃描儀獲取的點(diǎn)云穩(wěn)定且質(zhì)量良好,因此本文以站地式三維激光掃描儀獲取的點(diǎn)云構(gòu)建模型為參考,以融合照片模型為測(cè)試對(duì)象,將二者構(gòu)建的模型進(jìn)行整體3D比較,從而判定融合模型的精度。3D比較原理為,利用3D比較分析,會(huì)在測(cè)試對(duì)象和參考對(duì)象之間生成色譜圖,可以比較直觀地看出二者點(diǎn)云數(shù)據(jù)在X、Y、Z方向上的偏差值,其模型比較步驟如圖7所示。
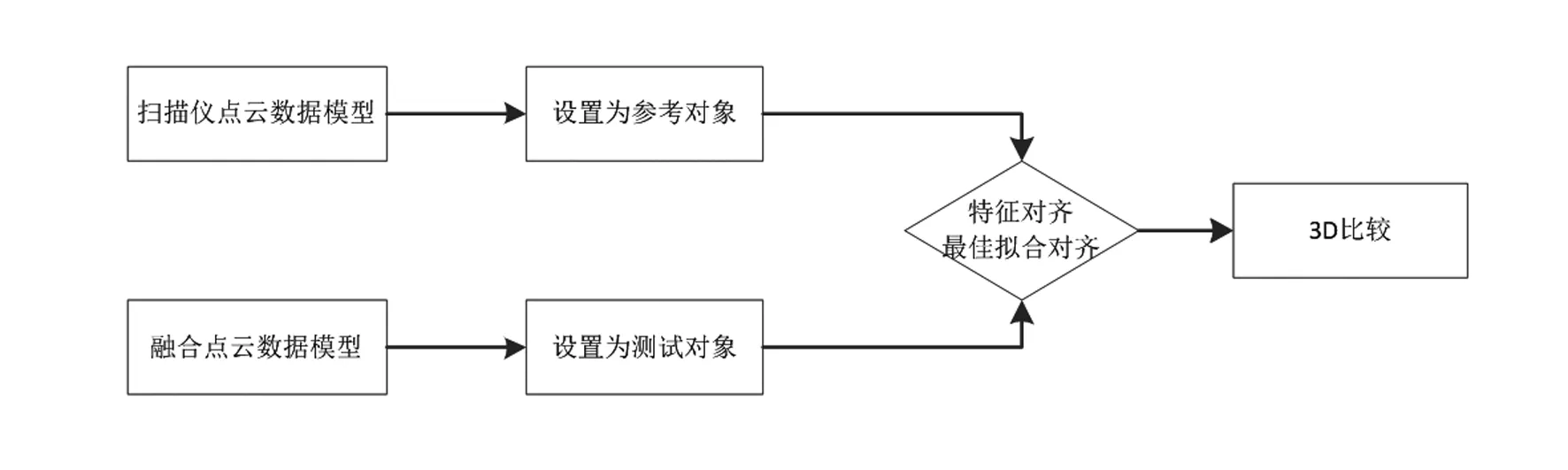
圖7 模型3D比較精度分析步驟圖
融合數(shù)據(jù)和掃描儀數(shù)據(jù)分別在不同坐標(biāo)系下,直接進(jìn)行3D比較則無(wú)法進(jìn)行,因此在進(jìn)行比較前,需對(duì)模型進(jìn)行特征對(duì)齊,使得在同一坐標(biāo)系下,經(jīng)特征對(duì)齊的模型再次使用“最佳擬合對(duì)齊”,對(duì)齊結(jié)果顯示,均方根誤差RMS為0.043 83 mm,平均誤差為0.031 54 mm。
將構(gòu)建的模型進(jìn)行3D比較分析后,得出不同位置點(diǎn)云的偏差分布。比較結(jié)果顯示,最大或最小臨界值均為±0.5193 mm,最大或最小名義值為±0.0260 mm,最大上偏差為+0.5193 mm,最大下偏差為-0.5018 mm,標(biāo)準(zhǔn)偏差為+0.0473 mm,偏差分布如表1所示。
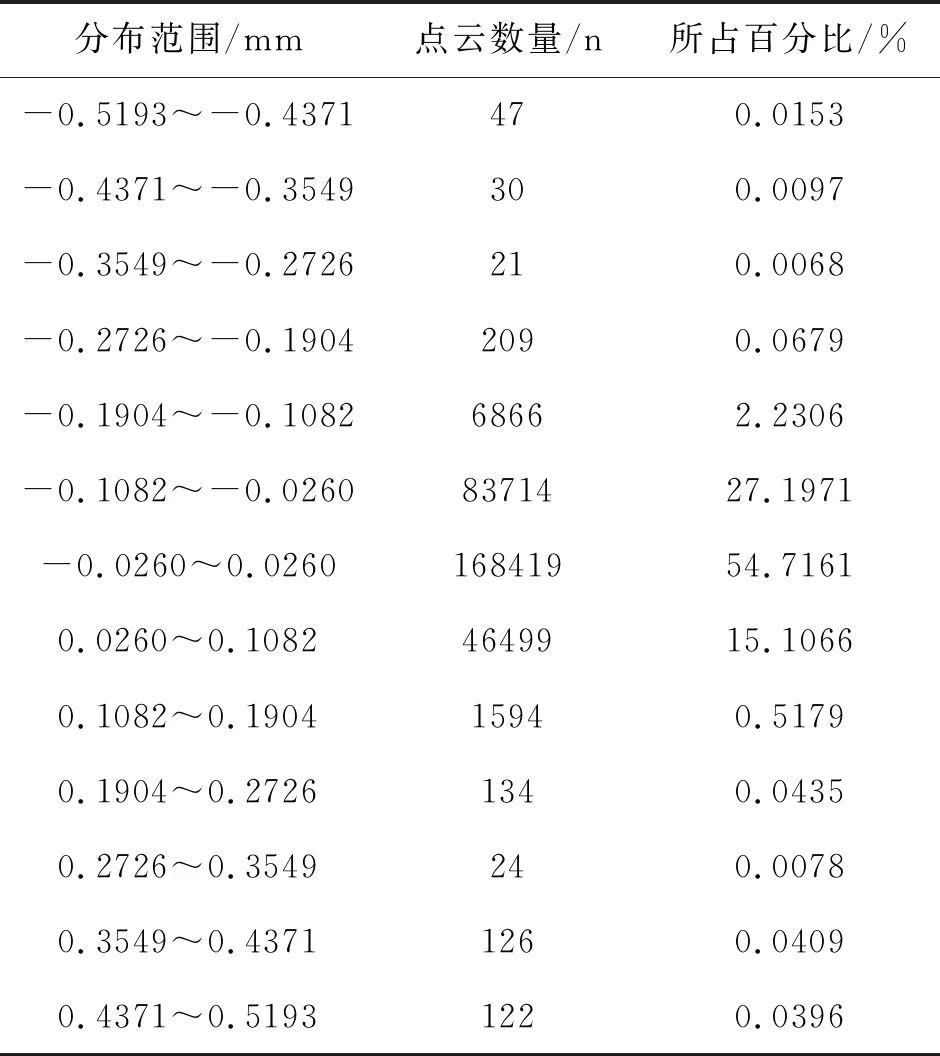
表1 3D偏差分布
由表1可知,有54.7161%的點(diǎn)分布在-0.0260~0.0260 mm,其中偏差超過±0.1082 mm的點(diǎn)云所占百分比總和僅為2.98%,從總體分布來看,3D比較偏差結(jié)果符合誤差要求,融合建模質(zhì)量效果良好。
5 結(jié)語(yǔ)
運(yùn)用航攝影像結(jié)合地面照片融合構(gòu)建紀(jì)念標(biāo)志物具有重大意義,實(shí)驗(yàn)結(jié)果表明該方法建模效果顯著,成功實(shí)現(xiàn)三維真實(shí)地物可視化。
數(shù)據(jù)采集方面利用航空攝影和地面拍照技術(shù)結(jié)合,彌補(bǔ)了二者之間的缺陷,使得獲取的目標(biāo)物信息更加完整;利用照片之間的連接點(diǎn)融合,使得缺失影像更加完整,減少外業(yè)獲取過渡影像帶來的麻煩。空地一體結(jié)合技術(shù)為特殊紀(jì)念物留存提供一種新的思路,具有良好的推廣價(jià)值,同時(shí)在文物保護(hù)方面具有重要意義。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
無(wú)線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
- 淮陰工學(xué)院學(xué)報(bào)的其它文章
- 基于AHP的模糊綜合評(píng)價(jià)法在物業(yè)服務(wù)質(zhì)量評(píng)價(jià)中的應(yīng)用
- 環(huán)境治理和公眾參與對(duì)環(huán)境支付意愿影響探究
- 基于SBE法的城市園林景觀植物優(yōu)化配置研究
- 基于Cruise的純電動(dòng)汽車動(dòng)力參數(shù)匹配與傳動(dòng)比優(yōu)化
- 新冠肺炎疫情視角下的閱讀推廣服務(wù)探析
——基于江蘇省公共圖書館微信公眾號(hào)閱讀推廣服務(wù)調(diào)查 - 小豆幼苗對(duì)低溫脅迫的生理應(yīng)激及烯效唑的緩解效應(yīng)