中低緯度下慣導極區性能模擬測試方法
2021-08-23 12:46:34卞鴻巍
系統工程與電子技術 2021年9期
文 者,卞鴻巍,馬 恒,*,臧 濤
(1.海軍工程大學電氣工程學院,湖北 武漢 430033;2.海裝武漢局駐武漢地區第二軍代室,湖北 武漢 430064)
0 引 言
近年來,隨著極地地區自然環境的開發,人類在極區領域的活動日漸頻繁,極區航線不斷開拓。極區導航能力成為船舶、飛機在極區航行過程中的重要科技支持。
由于慣性導航系統獨有的自主性、優良的可靠性,極區慣性導航成為研究的重點,而經線收斂、地球自轉矢量與重力矢量趨于共線等問題,使得中低緯度適用的傳統編排慣導算法失效[1]。針對此問題,前人也做了大量研究,主要有基于橫向坐標系[2-4]、格網坐標系[5-6]、平面坐標系或地球坐標系[7]等編排的極區慣導算法,以及基于游移力學編排的算法、全球導航的算法設計[8],各種極區編排算法的有效性都得到了驗證,并發展出了與之相關的阻尼算法、初始對準算法等,理論上已經比較成熟。
在對導航系統設備進行性能驗收評估中,實地測試是不可或缺的環節,對于需要檢驗極區性能的導航系統也是如此。然而由于極區環境惡劣,實測獲取數據難度大。北極地理位置遙遠,大規模全面實地性能測試試驗成本高,存在諸多現實困難。因此,需考慮被試導航系統采取中低緯度模擬測試的方法,即根據中低緯度被試導航系統輸出的導航參數評估其在極區相似運動過程中的精度性能。迫切需要在中低緯度為導航系統極區性能指標的綜合評價建立一套相對完善的評估體系,這將對降低極區慣導性能實地測試難度、節省實測成本,以及極區慣性導航系統設備研制、測試、應用等提供技術支持。
對于模擬測試領域的研究相關文獻較少。其中文獻[9]主要討論了構造“虛擬極點(極區)”方法,即在中低緯度試驗地區定義偽極區,在此區域采用游移編排格網導航算法驗證算法的有效性。但是虛擬極區和實際極區存在差別:一是地球自轉軸不會隨虛擬極區的設定而改變,無法模擬重力矢量與地球自轉矢量共線帶來的影響;二是由于地表曲率不同,在極區對于船舶等在海平面運動的載體而言軌跡將不再貼合地表,無法重復其在中低緯度的運行軌跡;三是對于重力異常等引起誤差的因素,極區與中低緯度的條件也不相同。綜上,虛擬極區方法能利用一段中低緯度航次對極區算法進行驗證,但進行系統誤差的定量分析存在困難,尚不能用于評估極區實地的精度性能。文獻[10]則采用了旋轉地心地固坐標系實現軌跡的轉移,但由于受到地表曲率不同的影響,軌跡轉移到極區后仍需投影回地表,同樣為后續誤差分析增加了困難,使得該方法仍僅適用于算法驗證。文獻[11]比較了極區與非極區條件下橫向導航算法的性能,文中部分提及中低緯度到極區的軌跡移植與慣性測量單元(inertial measurement unit,IMU)數據補償方法,但其主要對橫向坐標系地理適用性進行研究,研究由中低緯度數據生成極區數據,尚未系統深入地研究模擬測試具體方案。
在傳統慣導精度性能測試中常使用的高精度慣性導航系統/全球導航衛星系統(inertial navigation system/global navigation satellite system,INS/GNSS)組合導航作為測試基準,目前在經典卡爾曼濾波技術[12]基礎上發展出多種改進技術[13-16],組合導航的精度和可靠性得到進一步的提升,可作為中低緯度慣導模擬測試的基準系統。
本文分析了前人工作局限,在中低緯度實測試驗中以高精度慣導與衛導的組合導航系統作為測試基準,研究以極區坐標系為媒介,軌跡基準設計上把直接移植改換成推算的方法,從而避開地球曲率對軌跡產生變形而需要重新投影、近似等的復雜過程。基準軌跡的推算產生方式保持了與慣導解算過程的機理相近性,也為簡化后續定量誤差分析等工作提供了較好的模型基礎。最終本文提出了以“軌跡轉換過程中橫向坐標系下的姿態速度不變”為原則,在極區規劃與載體中低緯度運行的相似航跡,詳細推導了坐標轉換和相關變量計算公式。針對其中IMU轉換公式的數據來源問題,提出了以高精度INS/GNSS組合信息為基準的極區模擬測試方法,并通過仿真試驗檢驗了理論算法的有效性。
1 極區模擬測試基本理論
極區橫向編排的慣導解算方法已較為成熟,在此不再對橫向坐標系、慣導橫向編排加以贅述,本文所述的橫向坐標系是以90°E與赤道交點為橫北極點、本初子午線為橫向赤道構成的橫向坐標系,詳細定義見文獻[17]等。以下針對極區模擬測試軌跡轉移原則及方法、轉換過程相關變量的表示、IMU數據轉換方法進行討論。
1.1 軌跡轉移方案

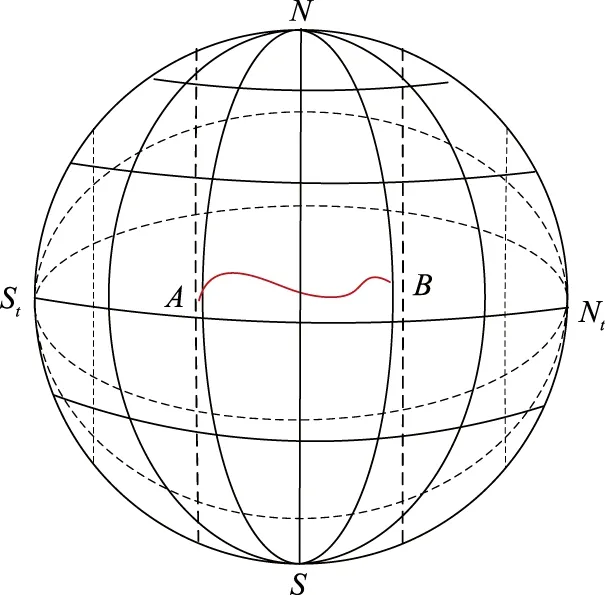
圖1 中低緯度軌跡示意Fig.1 Trajectory of middle and low latitudes
要把這段過程轉移到極區來進行,往往考慮采用兩類策略:一是轉換前后保持地理坐標系下航向不發生變化;二是盡量減小軌跡形狀變形,設法將軌跡移植到極區。對于前一種方法,理論上分析簡單,轉換公式推導也相對容易,但是在極區時刻與中低緯度軌跡保持傳統航向一致,勢必會對速度進行壓縮,軌跡也會發生嚴重壓縮變形,特別是在近極點,速度趨于0,將無法完成模擬測試任務。對后一種方法,若中低緯度與極區的軌跡相似,考慮到橫向坐標系的特點,因此采用橫向姿態速度不變的轉換原則以達到目標。首先應當進行參數的坐標轉化。
1.2 極區模擬測試的初始化
1.2.1 速度、姿態、起始位置的坐標轉化
由于模擬測試過程采取橫向編排的慣導解算,首先應先將傳統地理坐標系下的參數轉到橫向參數以便于后續分析。

(1)
(2)

(3)
(4)

(5)
式中:φt和λt表示橫向緯度和經度。
為計算同一點的地球坐標與橫向地球坐標對應關系,即將坐標(φ,λ)轉為(φt,λt)的公式如下:
(6)
方程推導從略。

1.2.2 模擬起始點位置的選定

(7)
在模擬測試中,模擬位置載體坐標系記為bm系,模擬位置當地橫向地理坐標系記為tm系。
1.3 IMU數據轉換算法
假設系統已按第1.2節內容在模擬極區設置了起始點,要模擬慣導系統在高緯度的運行,需要了解在相同的運動過程中IMU的輸出有何變化。
1.3.1 加速度計輸出數據補償算法
捷聯慣導速度更新方程(比力方程)為
(8)
式中:n為導航坐標系,如采用傳統編排,n可改用g,即地理坐標系;如采用橫向編排則可改為t或tm。
在實測和模擬地區都應滿足比力方程:
(9)
由轉換前后橫向地理系下速度保持不變,橫向地理系下姿態保持不變的前提條件,即
(10)
(11)

vt+gtm-gt}
(12)
1.3.2 陀螺儀輸出數據補償算法
捷聯慣導的姿態更新方程可表示為
(13)
在實測和模擬地區都應滿足姿態更新方程:
(14)
由式(10)和式(11),式(14)可作化簡,其中:
(15)


(16)

1.3.3 IMU轉換公式中變量計算方法

(17)

(18)

東向速度和北向速度會對經緯度變化產生影響,令p和q分別為經度變化率單位矢量和緯度變化率單位矢量[2],則有
(19)
有關橫東向速度、橫北向速度對橫經緯度變化的影響,可表示為
(20)
式中:R1、R2、R3可表示為
(21)
式中:a為地球長軸半徑;e為地球偏心率。需要指出的是,在采用地球球體模型或近似計算時,可置地球偏心率e=0,從而舍棄掉較復雜的項,該變量最終表示為載體速度引起的橫經緯度變化率:
(22)
Ctmt表示原橫向地理坐標系到模擬地區地理坐標系的旋轉關系,其計算可使用地球系過渡:
(23)
對于gt,使用達朗貝爾方程(WGS-84地球參數):
(24)
式中:g0=9.780 325 m/s2,為赤道海平面處的重力加速度;h為海拔高度。式(24)采用的是地理緯度,模擬測試解算中應進行橫向地理坐標至傳統地理緯度的轉化。
2 模擬測試基準形成與方案設計
在模擬測試中,實測軌跡起點A點參數(位置、速度、姿態)應當以一定精度給定,其將影響模擬地區起始點A′點的慣導解算初始偏差。
2.1 模擬測試按基準情況的分類
在實際規劃模擬測試的算法結構時,不同于普通測試的是,處理IMU數據轉換時應根據基準的不同條件分為兩類不同情況:一類是有基準情況,如在測試中中低緯度全部導航參數(姿態、速度、位置)均擁有較高精度的外部參考信息可作為基準使用,依此原則設計的模擬測試稱為嚴格模擬測試(簡稱為嚴測試);另一種是無基準情況,認為除利用中低緯度起始點相關狀態給定模擬慣導初值外,其后導航參數均無基準參考,完全依賴慣導自身解算值提供IMU轉換公式中的中低緯度參數。依此原則設計的模擬測試稱為寬松模擬測試(簡稱為寬測試),對于寬測試這種試驗方法,中低緯度參數將采用慣導計算參數的形式代入IMU轉換公式中,式(12)和式(16)改寫如下:
(25)
式中:tc和bc表示中低緯度慣導計算機中相應的計算坐標系。顯然,寬測試采用了測試慣導自身計算參數,后續對極區的模擬過程中復合了中低緯度導航參數計算誤差,分析上帶來了更大的困難,但其意義在于無基準條件下也可以進行軌跡等導航參數及IMU的粗轉換,必要時可以根據IMU的屬性估計出測試誤差。
針對實際情況,對于設備的檢驗,往往設置一定的參考基準,在中低緯度對于速度、位置等設置高精度設備進行陪試。
同中低緯度測試相似,極區模擬測試中較常見地出現介于上述二者間的其他情形,如測試載體上裝有GNSS信號接收機,則可視為位置的參考基準;實測過程中有白光測距儀進行工作,外部提供的速度是準確度較高的,則測距儀的速度信息可用作基準;測試載體安裝有天文導航系統工作,航姿信息精度較高,則可用作姿態基準;或測試慣導旁存在更高精度慣導,則取基準導航參數為高精度慣導輸出參數,等等。由此可見,實際模擬測試過程中少見全無基準僅純測試慣導運行的情形,但也不能保證所有導航參數均設置有高精度基準參考,因此實際模擬測試情況往往介于上述兩種分類之間,不再單獨分類。
2.2 基準軌跡轉移方法
中低緯度基準轉移至極區形成基準,其中各時刻模擬位置速度基準、姿態基準與中低緯度時保持一致,可按照式(1)和式(2)給出,位置基準則可參考慣導位置更新的遞推算法給出:
(26)
式中:起始位置為設定的極區起始點;T表示采樣周期;緯度變化率、經度變化率參見式(20)。式(20)中的橫向速度、橫向經緯度變量可以k時刻模擬地區基準值代入。軌跡基準轉化后,將生成一條模擬軌跡A′B′,如圖2所示。

圖2 極區模擬基準軌跡Fig.2 Polar simulation reference trajectory
圖2中,實線表示傳統北極地區經緯網,虛線表示橫向緯線,其形狀將與中低緯度軌跡AB相似。
2.3 基于高精度INS/GNSS基準的模擬測試具體方案結構設計
選取較高精度的基準以盡可能保證極區模擬測試的準確性是測試的必要條件,高精度INS/GNSS的速度、位置組合導航方式輸出導航參數,其速度、定位精度均優于衛導精度,接近上文所述的嚴測試情形,且保持了慣導輸出的連續性,可作為理想基準使用。
以高精度INS/GNSS組合導航方式為測試基準的極區模擬測試方案結構圖如圖3所示。圖3中,以a、v、p分別表示導航參數姿態、速度和位置。
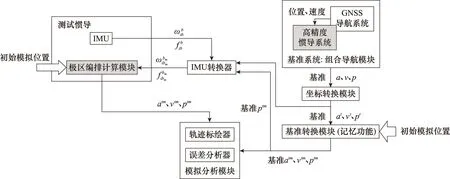
圖3 極區模擬測試方案結構圖Fig.3 Structure diagram of polar simulation test scheme
圖3中測試慣導提供IMU數據,可無需進行當地解算;組合導航基準模塊提供基準的姿態、速度、位置信息;坐標轉換模塊作用是將地理坐標系下導航參數轉化為當地橫向坐標系下,所用公式為式(1)~式(6);基準轉換模塊將中低緯度橫向坐標系基準導航參數轉移至模擬地區橫向坐標系基準導航參數,其中姿態、速度基準量保持不變,位置基準計算所用公式為式(26),該模塊需保留上一周期模擬地區的基準速度、基準位置,即式(20)和式(26),故需要一周期的記憶功能;IMU轉換器為模擬測試核心模塊,功能是將測試慣導IMU數據轉換為模擬IMU數據,所用公式為式(12)和式(16),公式分析指出,相關變量的計算需要中低緯度基準姿態、速度、位置,以及模擬基準位置信息;極區導航計算機根據初始模擬位置信息和模擬IMU數據運行極區橫向坐標系編排的慣導解算程序;軌跡標繪器通過極區導航計算機的位置解算繪制軌跡;誤差分析器通過比較模擬地區基準導航參數與極區導航計算機解算參數,進行后續分析。
3 仿真試驗
3.1 中低緯度基準軌跡設置與導航參數坐標轉換仿真分析
采用軌跡發生器,在中低緯度生成一段軌跡,總時長48 h。軌跡特征如下:起點為地理坐標系下(10°N,0°),靜止起步勻加速25 s至5 m/s,運行過程中速度大小不變,航向角初始為地理系下北偏東30°,在第6 h、第18 h左轉彎,第30 h、第42 h右轉彎,轉彎時設置載體傾斜以模擬實際情況,48 h后減速到0。以軌跡發生器生成的無誤差導航參數作為基準,繪制基準的軌跡、速度、姿態在橫向坐標系下的投影結果,如圖4~圖6。
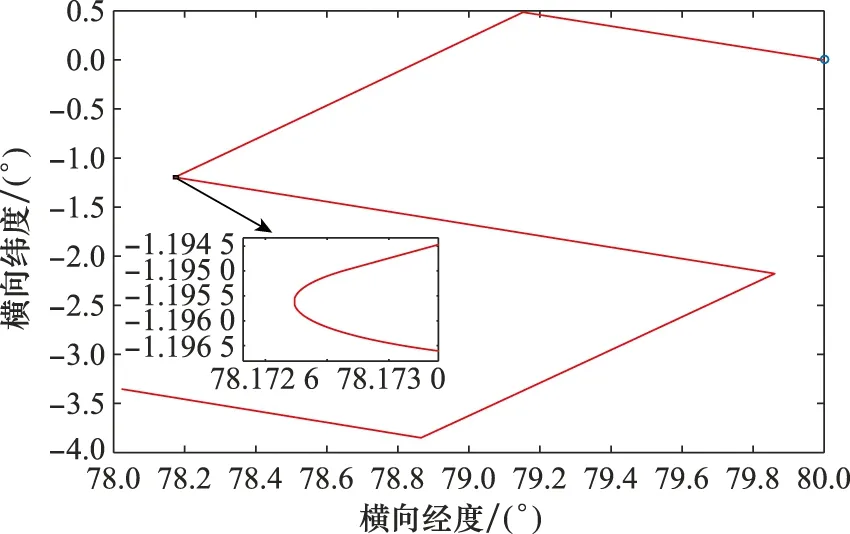
圖4 橫向坐標系下中低緯度基準軌跡Fig.4 Reference trajectory at middle and low latitudes of transverse coordinate system

圖5 橫向坐標系下中低緯度基準姿態Fig.5 Reference attitude at middle and low latitudes of transverse coordinate system
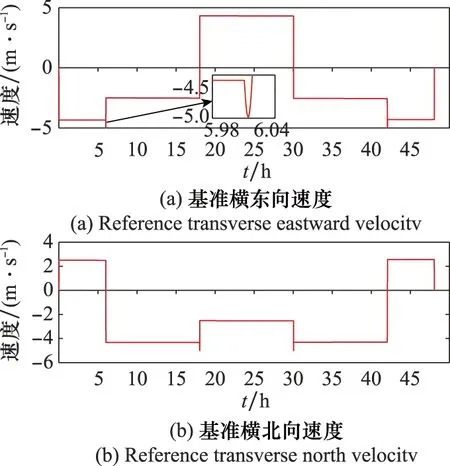
圖6 橫向坐標系下中低緯度基準速度Fig.6 Reference velocity at middle and low latitudes of transverse coordinate system
軌跡起點為0°經線,恰為橫向坐標系赤道,10°N對應橫向經度80°,起初向地理東北(橫向西北)方向運行。經分析圖4符合預期,可見位置基準坐標轉換正確。
橫縱搖、橫橫搖與縱搖、橫搖相等;航向角起初為地理系下北偏東30°,而橫向北方向為地理東方向,因此在橫向系為60°,其后載體每左轉一次航向角加90°,每右轉一次航向角減90°。據圖5可知,姿態基準轉換符合預測。
軌跡第一段速度為橫向北5·sin 30°=2.5 m/s,橫向西5·cos 30°≈4.33 m/s,此后每次轉向時橫航向角變化,速度方向也隨之變化,但其大小保持5 m/s,由圖6計算可知,速度基準轉換符合推測結果。
3.2 極區模擬測試仿真試驗

將中低緯度測試慣導IMU轉化為極區模擬IMU輸出,進行模擬測試,結果如圖7~圖13。圖7和圖8繪制了模擬測試軌跡及其誤差。圖9和圖10分別繪制了模擬IMU解算速度及速度誤差。圖11~圖13分別繪制了模擬IMU解算橫縱搖、橫橫搖及其誤差和航向角誤差。

圖7 極區模擬基準軌跡與解算軌跡Fig.7 Reference trajectory and calculated trajectory of polar simulation

圖8 極區模擬測試位置誤差Fig.8 Position error of polar simulation test
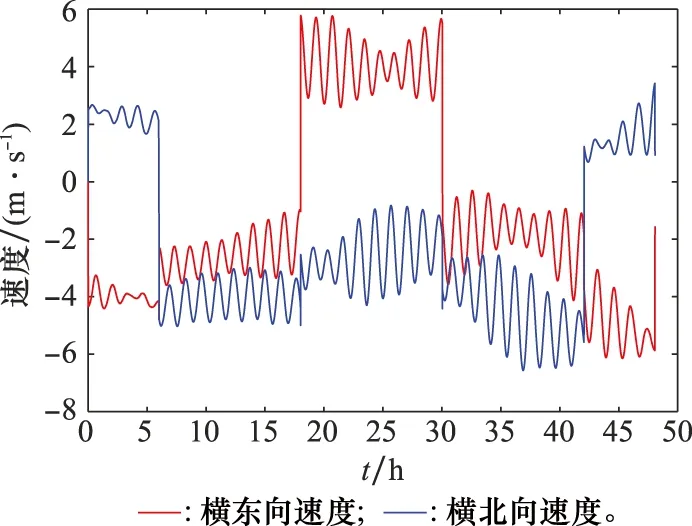
圖9 極區模擬測試速度Fig.9 Velocity of polar simulation test
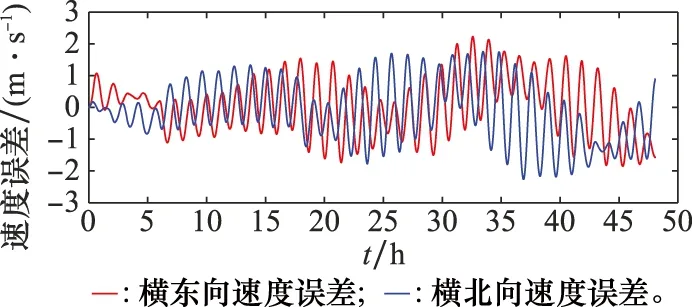
圖10 極區模擬測試速度誤差Fig.10 Velocity error of polar simulation test

圖11 極區模擬測試水平姿態角Fig.11 Horizontal attitude angle of polar simulation test
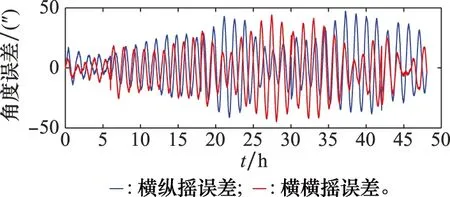
圖12 極區模擬測試水平姿態角誤差Fig.12 Horizontal attitude angle error of polar simulation test

圖13 極區模擬測試航向角誤差Fig.13 Heading angle error of polar simulation test
3.3 極區模擬測試仿真試驗誤差分析
在設置仿真條件(陀螺漂移0.01°/h等)與不計基準誤差的條件下:極區模擬測試的橫向經緯度誤差含有舒拉周期振蕩成分,并被傅科周期振蕩調制,誤差逐漸發散,24 h內最大定位誤差小于5 n mile,48 h最大定位誤差約為15 n mile;速度、水平姿態誤差也為舒拉振蕩形式,與極區慣導解算的普遍表現相同,速度誤差最大值約為2 m/s,橫橫搖、橫縱搖誤差最大值約為40~50角秒;橫航向角誤差線性發散,48 h誤差發散到約28角分。
根據文獻[18]的極區橫向編排誤差分析,陀螺漂移會造成橫經緯度、橫航向誤差發散,也與模擬測試解算相符;文獻[18]設置元件誤差與本文相同,比較模擬測試誤差與所述文獻中極區動基座仿真試驗誤差,各個導航參數誤差表現形式及量級基本一致。
3.4 仿真試驗結論
根據中低緯度基準圖像分析得出結論,地理坐標系與橫向地理坐標系之間導航參數轉換正確;根據模擬測試仿真試驗結果初步分析得出結論,模擬測試IMU轉換公式推導、模擬測試基準轉換、橫向坐標系編排下的慣導解算均正確;根據誤差分析得出結論,在基準誤差遠低于測試慣導誤差的條件下,同一慣導系統極區模擬測試誤差與極區實地運行誤差相當。
4 結 論
本文針對極區慣性導航設備的試驗問題,探究了中低緯度模擬極區測試的方法,以避免地球曲率的影響造成軌跡二次投影為切入點,提出了軌跡轉移過程中橫向坐標系下速度、姿態不變的原則,在理論上詳細推導了基準轉換過程和IMU轉換過程。對基準的不同情況進行分類,并提出了以高精度INS/GNSS組合導航為基準的具體測試方案。仿真試驗驗證了模擬測試算法理論的正確性,以及在基準誤差不計的條件下,模擬測試誤差與極區橫向編排解算誤差相當,為簡化模擬測試體系誤差分析奠定了基礎。
