蝦塘差速無人投飼船巡邊算法設計與仿真分析
2021-08-26 08:04:16胡慶松陳研霖陳普坤陳雷雷匡興紅
漁業現代化 2021年4期
胡慶松,陳研霖,陳普坤,陳雷雷,匡興紅
(1 上海海洋大學工程學院,上海 201306;2 上海海洋可再生能源工程技術研究中心,上海 201306)
隨著對蝦養殖行業的轉型升級,無人投飼船已經日漸成為對蝦養殖生產作業自動化的重要裝備。作為典型的無人投飼船,差速無人投飼船以其航行穩定、運動靈敏、易于控制等優點廣泛應用于蝦塘養殖作業[1]。結合對蝦沿邊巡游的攝食習性,巡邊作業及其控制算法的研究能為蝦塘差速無人投飼船設計與應用提供理論依據。
巡邊算法是國內外學者關注的研究熱點之一。Yata等[2]在無人小車平臺上研究了單超聲傳感器巡邊控制,提出了巡邊過程的部分控制參數,并指出了其巡邊算法在速度方面的局限性。在此基礎上,Suresh等[3]應用圖像采集技術和多傳感器融合算法獲取巡邊控制中相對精確的姿態信息;Wei等[4]提出了一種基于實時動態虛擬墻的巡邊控制方法,能在航行速度0.6 m/s的限定下,較好地完成巡邊作業。隨著硬件技術及智能算法的發展,Teng等[5]利用視覺技術建立邊界特征來捕捉邊界信息,在光照條件穩定的室內場景中研究了其巡邊算法的應用效果。Lin等[6-7]基于人工蜂群的自適應神經網絡控制算法,以巡邊過程的角度和距離信息為控制量,采用仿真方法驗證了該算法在速度小于1 m/s情境下的性能。Chen等[8-9]用模糊神經網絡改善了人工蜂群算法,提高了對邊界的適應性。Jhang等[10]比較了模糊1型和2型算法在巡邊控制中的應用,指出了模糊2型算法在實時計算方面具有較好的性能。考慮實際環境中干擾因素對巡邊作業的影響,Wang等[11-12]通過設計干擾觀測器來估計環境產生的干擾項,應用反步控制器生成控制律來解決一定范圍內的擾動問題。
綜上,巡邊控制算法的研究取得了一定的成效,但主要集中在低速無人船巡邊作業領域,且硬件成本高、實現過程復雜,無法滿足蝦塘差速無人投飼船的巡邊作業要求。蝦塘差速無人投飼船應用中,要求在較低成本下,較大運行速度范圍內,實現船體在水面顛簸搖晃的環境下穩定、可靠的巡邊控制作業。
本研究在差速無人投飼船運動模型的基礎上,提出了一種以帶夾角的雙超聲或雙紅外傳感器為感知設備,融合傳感器數據和傳感器安裝角度信息構造船體姿態三角形,通過利用邊距(邊距區間搜索控制)和船體姿態角(PID算法控制)實現投飼船巡邊的PID巡邊控制算法。并在MATLAB環境下建立仿真模型,仿真驗證了方塘和不規則塘邊界下不同速度時,算法的適用性和姿態保持的穩定性。
1 差速無人投飼船運動與反饋模型
1.1 差速無人投飼船運動模型
差速控制是投飼船最常見的船體運行控制方式之一[13]。差速無人投飼船在投飼作業中,首先,不同池塘面積和養殖階段對投飼量需求有較大的不同,要求算法能在較高速度(2~3 m/s)下穩定運行,以提高養殖生產作業的柔性;其次,水面投飼作業工作環境濕度大、粉塵多[14],要求算法的基礎感知設備具有惡劣環境適應性及可靠性;最后,農業生產具有成本敏感性,要求算法整體的軟硬件成本較低。
差速無人投飼船如圖1所示,一般由左右2個螺旋槳推動船體運行,通過左右螺旋槳差速來控制船體左轉或者右轉,實物模型如圖1所示。
毛雞隨著只重的增大,其腿、大胸等部位的占比會隨著相應的增大。由圖1毛雞只重對肉雞腿產品的出成影響可知,隨著雞只毛重從4.31×500g增加到5.91×500g,腿出成變化非常明顯,從25.41%增加到26.29%,增加了0.9%。不同毛雞只重對于腿產品的出成有明顯的影響,并且4.61×500g和5.10×500g兩組實驗中腿出成變化趨勢大,腿出成相差0.6%,對于提高腿類出成的毛雞只重在5.00×500g以上效果顯著。

圖1 雙體船實物圖Fig.1 The structure of Twin-Hull
根據其運行特性,在忽略俯仰、橫搖、縱搖運動自由度的情況下[15](一般在惡劣天氣環境下,投飼作業會暫停,可以忽略風浪和惡劣天氣的影響),可以在圖2所示坐標系中定義差速無人投飼船的運動模型,表示為公式(1):
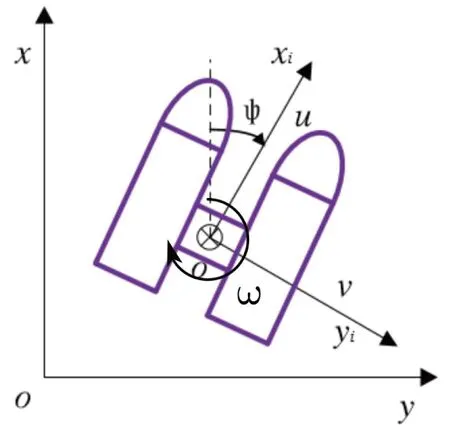
圖2 投飼船模型坐標系定義Fig.2 Coordinate system definition of the feeding ship model
(1)
(2)
1.2 差速無人投飼船的運動姿態反饋模型
船體位置信息是船體運動閉環控制的重要因素,減少其信息反饋量,能夠大幅簡化控制器設計[16-17]。差速無人投飼船姿態反饋模型通過2個傳感器反饋的距離信息及傳感器安裝位置信息計算船體位置信息。如圖3所示,所搭載傳感器按照水平角度θ安裝在靠近邊界一側,傳感器1的信號發射方向需垂直于船體邊沿,根據實際應用環境不同,可在船頭選擇合適的位置。
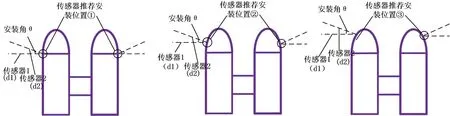
圖3 傳感器安裝位置示意圖Fig.3 Schematic diagram of sensor installation position
將傳感器距離信息和安裝角度結合,可得到船體運行的姿態三角形Δoo1o2,如圖4所示,邊界l可反映船體的邊界信息。
邊界l與船體邊沿平行時,姿態角α=90°,為船體正確姿態。當姿態角α>90°時,船有遠離邊界的趨勢,如圖4a所示,控制系統應向靠近邊界側響應。當邊界l延長線與船左側邊沿相交且成銳角,姿態角α成銳角,此時控制系統應輸出遠離邊界的響應,響應程度大小取決于實際偏差,如圖4b所示。通過不同狀態下的姿態三角形可得到巡邊無人投飼船在池塘中的位置信息。
船體的定位方式采用相對定位[18]。在傳感器進行合理布置后,通過傳感器反饋的距離信息計算姿態三角形參數并得到控制參量。邊界l滿足:l=(d12+d22-2d1d2cosθ)1/2,同時可得到姿態角α=arccos((l2+d12-d22)/2ld1)。如圖4所示,D為姿態三角形的高,表示船在航行過程中與邊界的距離關系。在實時控制中,考慮到傳感器的反饋誤差,為提高計算精度,選用兩個傳感器反饋值的較小值進行D的計算,不同姿態時,D分別滿足以下公式。

圖4 船體與邊界的相對姿態Fig.4 Relative attitude between hull and boundary
當d2>d1時,
(3)
當α≤90°,θ≤90°,α+θ≥90°時,
(4)
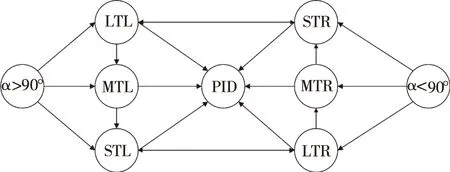
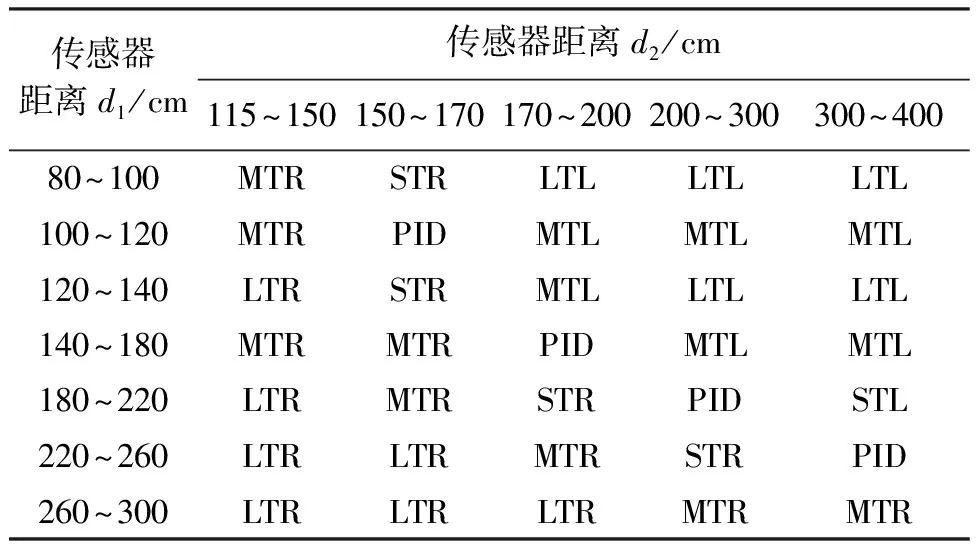
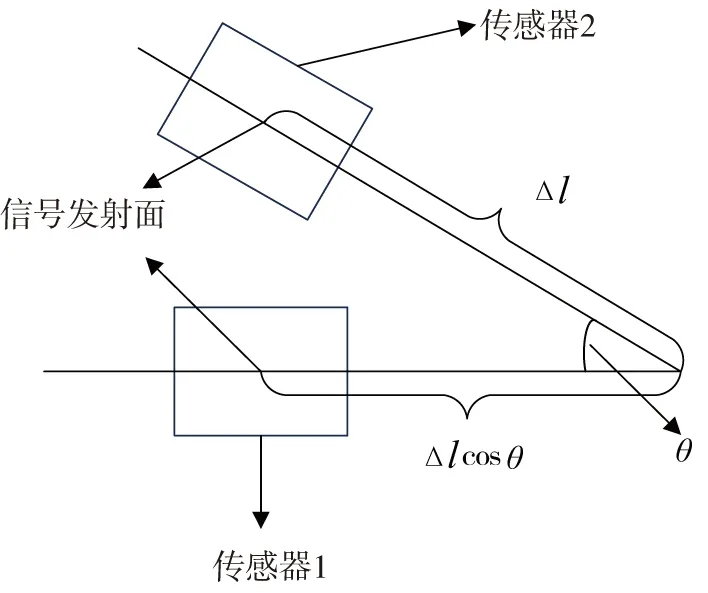
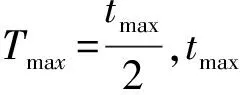
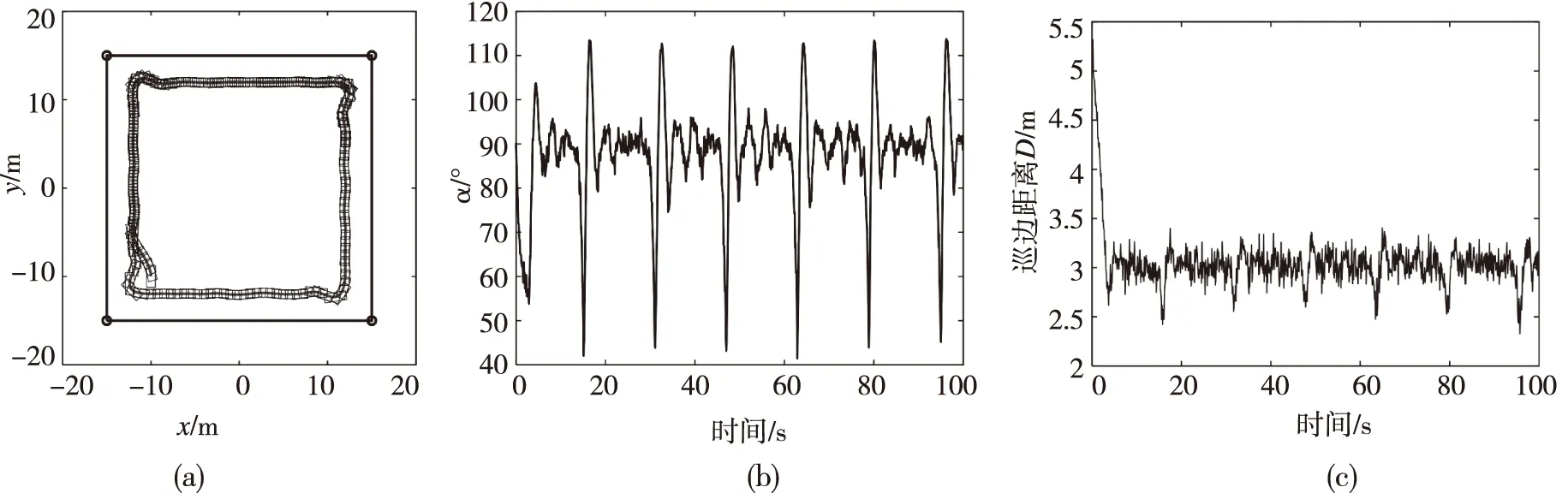
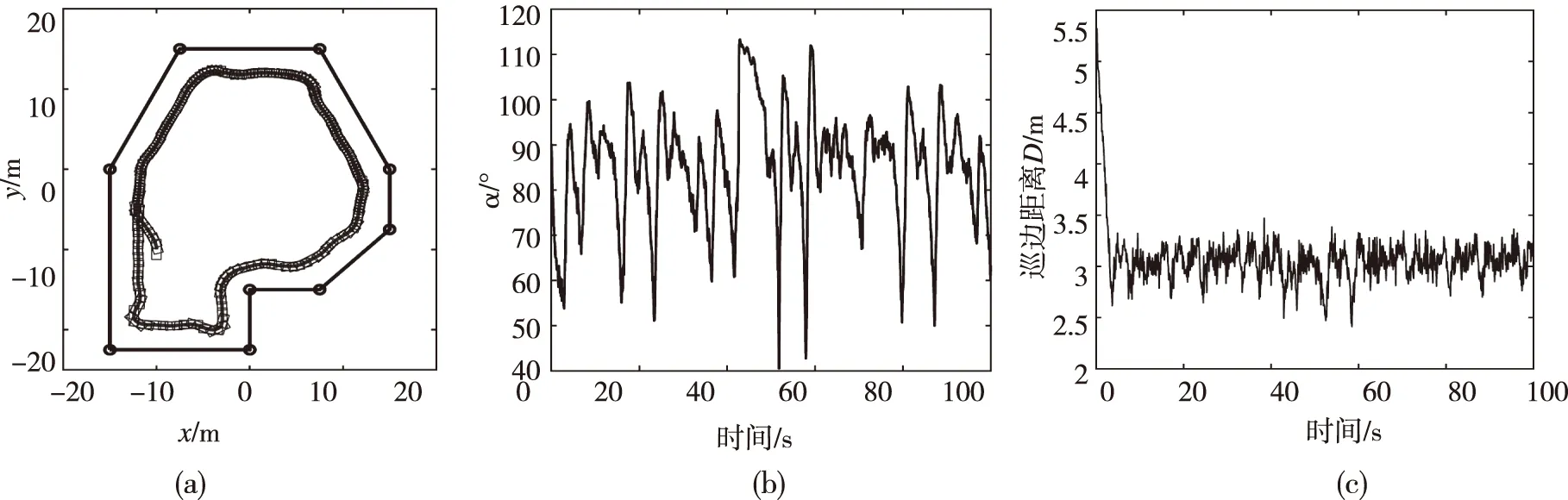
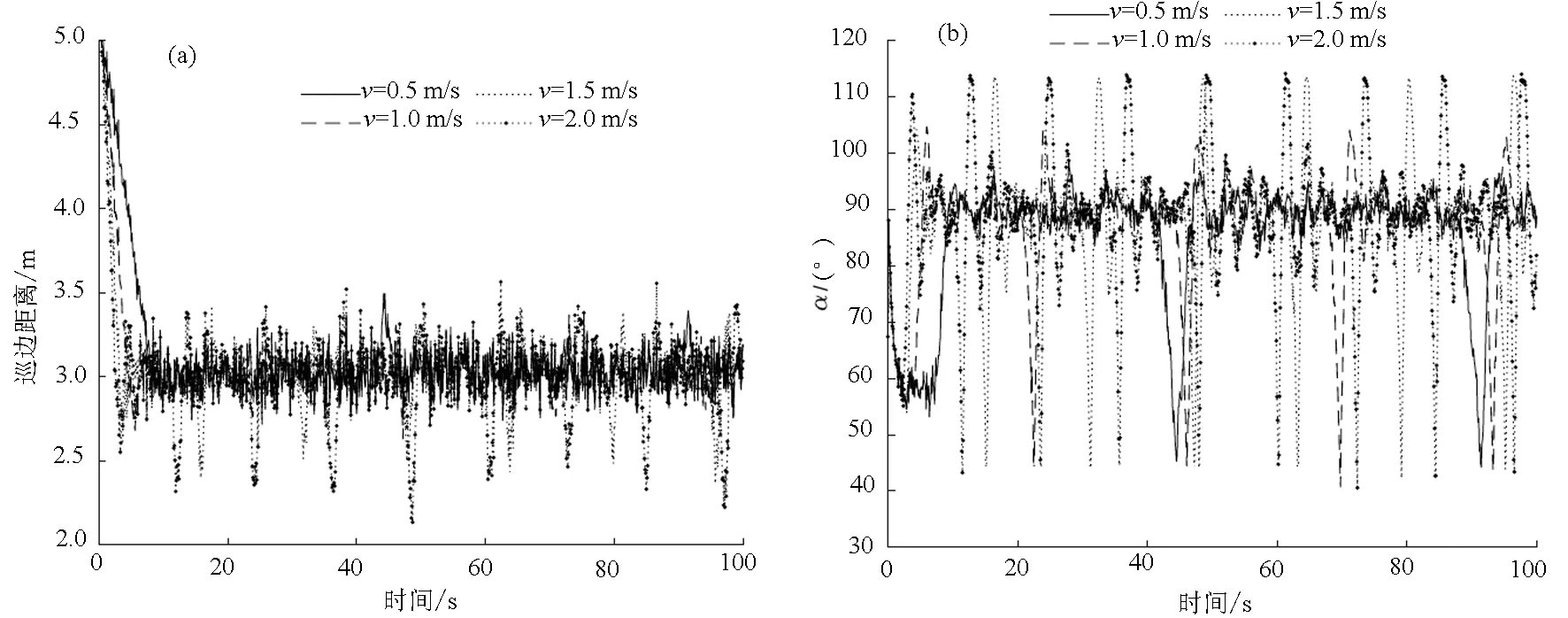
當d2 D=d2sin(θ+α) (5) 式中:d1、d2分別為傳感器1和2的反饋距離;l為三角形邊界;α為姿態角。 巡邊作業過程中,參數選擇的差異會影響邊界跟蹤性能,因此,安裝角θ、航行速度v、巡邊距離L這3個參數在調整中應遵循如下幾個原則:1)巡邊速度較慢時,安裝角θ和巡邊距離L,可有較大的選擇范圍;2)巡邊速度較快時,為減少反饋信號的干擾,安裝角θ應選較大值;3)為減少傳感器相互干擾,安裝角θ應盡量選擇大于45°的角度值;4)進行較大巡邊距離跟蹤時,應結合安裝角θ考慮傳感器的距離量程。根據以上原則,參數選擇范圍示例如表1所示。 表1 安裝角θ、航行速度v、巡邊距離L技術參數Tab.1 The parameter of θ、v、L 為較快收斂到PID姿態控制范圍,設計了邊距區間搜索控制律以控制船體的距離。邊距區間搜索控制通過劃分誤差區間確定控制量,區間大小根據MCU計算能力及控制平滑性要求劃分參考調整策略如表2所示,表2中有3種區間:L(大范圍)、M(中間范圍)、S(小范圍),2種控制策略:左(TL)、右(TR)。圖5為區間搜索的控制過程,算法會最終收斂到PID控制。調整區間根據兩傳感器信息的相對關系確定,表2中d1、d2的相對長度應根據安裝角度θ確定,正確姿態時滿足式(6),同時對應PID控制區間。 圖5 邊距區間搜索控制律Fig.5 Margin interval search control law 表2 船體運行范圍控制枚舉表Tab.2 Enumeration table of hull operation range control d1=d2cosθ (6) 因傳感器類型或安裝方式不同,會造成返回距離計算的固有誤差,從而影響巡邊控制的精度。為了盡量減少這種影響,引入修正量Δl,Δl為傳感器2探頭到超聲波反向交點的距離,如圖6所示,式(6)變更為式(7)。 圖6 傳感器安裝誤差示意圖Fig.6 Schematic diagram of sensor installation error d1+Δlcosθ=(d2+Δl)cosθ (7) 2.2.1 PID控制的實現 變積分PID算法基本公式見式(8),在無人投飼船巡邊PID算法中,被控量為姿態角α,船體航行姿態的控制是在電機設定的轉速的基礎上對轉速進行微調,每個電機的實際轉速可以表示為設定轉速和微調轉速,驅動電壓由基礎電壓U和調整電壓ΔU組成,改變ΔU,將改變姿態角α的大小從而改變船體前進的方向。所設計PID姿態控制算法,為減少硬件負擔并更好地滿足實時性控制要求,采用變速積分PID調節和增量輸出。 e(k)}T+kd[e(k)-e(k-1)] (8) 式中:e(k)、e(k-1)—分別表示當前和上一時刻的控制偏差;Kp—比例系數;Ki—積分系數;Kd—微分系數;T—控制周期。其中f[e(k)]滿足下式: (9) 式中:N、M—分別為關于偏差的分離區間上限和下限。 為防止積分飽和,對積分環節輸出限幅,設置輸出上限Umax和下限Umin,當u(k)滿足Umin 2.2.2 關鍵參數的選擇 1)采樣周期的選擇 2)控制參數的選擇 仿真應充分結合實際被控系統物理特征[23],如螺旋槳輸出延時、功率放大器響應滯后、信號噪聲等因素。在MATLAB/SIMULINK仿真環境下,以一階慣性環節模擬延時過程[24],用方差為1.3、均值為0的高斯白噪聲代表傳感器信息的不確定性[25],綜合實際硬件系統各環節銜接產生的控制延時,將采樣頻率設為10 Hz[26-29]。 3.1.1 方塘邊界仿真試驗及分析 矩形邊界是對蝦養殖池塘最常見的邊界形式,邊界立面呈斜坡狀或垂直狀。仿真船速為3 m/s,要求保持的巡邊距離為3 m。仿真結果顯示見圖7,由曲線b可見姿態角α總體保持在90°,在邊界拐角處出現的較大的波動,表明算法能夠保證姿態的穩定性;曲線c可見巡邊策略能夠保持參考距離D的總體穩定性,當出現較大拐角時,距離并沒有出現較大的偏差。 圖7 矩形邊界仿真跟蹤結果Fig.7 Simulation and tracking results of rectangular boundary 3.1.2 不規則塘邊界仿真試驗與分析 考慮養殖池塘實際狀況各不相同,為驗證算法的適應范圍,建立如圖8a所示不規則邊界并進行仿真驗證。仿真船行速度為3 m/s,巡邊距離為3 m,結果顯示,在相對較復雜的邊界下,姿態角存在一程度的波動,但算法仍能保持距離和姿態的穩定性。從邊界角度看,本研究所提算法和文獻[9]都表現出對不規則邊界較好的追蹤效果,相比而言,通過強化學習增強了算法優化方面的優勢,但同時提升了對傳感器數量和數據處理的要求,增加蝦塘環境中設備維護的負擔。 圖8 不規則內凸邊界仿真跟蹤結果Fig.8 Simulation results of irregular inner convex boundary 在不規則邊界條件下,要求相同的巡邊距離,對不同的安裝角θ和巡邊速度進行仿真對比分析,以驗證算法對不同的安裝條件和船行速度的適應性。安裝角分別取30°、45°、60°、80°,在船速取2 m/s時仿真結果見圖9,可見不同的安裝角下,巡邊距離可維持在設定距離3 m,同時在30°時遇到拐角出現較大偏差,但算法的收斂速度較快,能夠很快恢復到正常范圍,姿態角維持在90°附近。巡邊速度取0.5、1.0、1.5、2.0 m/s,安裝角取60°時,仿真結果見圖10,可見不同的船速下,船的位姿保持在正常范圍內。方差分析結果顯示,不同安裝角下,姿態角α的波動方差依次為0.036、0.031、0.038、0.047;不同巡邊速度下,姿態角α的方差依次為0.12、0.08、0.04、0.05。方差分析顯示,兩組參數的仿真結果數據波動小,即在不同的船速和安裝角度下,算法能夠保證船體的巡邊運行的穩定性。文獻[4,9,30]仿真分析距離等參數對所提算法的影響,綜合相關文獻結論顯示,在室內環境下,最大巡邊速度為2.92 m/s,可保持的穩定巡邊距離為0.74 m。相比之下,本研究算法具有裝置安裝參數可調的優勢,對于較快速的巡邊過程具有一定的可靠性。 圖9 不同安裝角下的距離和姿態角圖Fig.9 Distance and attitude angle diagram under different installation angles 圖10 不同船速下的距離和姿態角圖Fig.10 Distance and attitude angle diagrams at different ship speeds 差速無人投飼船巡邊控制算法是蝦池塘養殖自動化裝備設計和應用的關鍵。本研究基于差速無人投飼船的運動特性,構建了基于三角形參數的姿態反饋模型,解決了姿態解算計算量大的問題。結合模型,提出了一種融合測距傳感器數據的巡邊控制算法,降低了雙體船運動控制中非線性因素的影響。充分考慮到算法轉化為工程實際的難度,其實現過程受不同環境的影響較小。仿真結果表明,算法在0~3 m/s的速度設定下,能滿足0~3 m的穩定巡邊距離要求。同時,算法對具有內凹角和外凸角的邊界具有相同的追蹤效果,表現出不同類型邊界較好的適應性。綜上,在算法設計和實現方式上,本研究對巡邊過程的實際應用都有一定的借鑒意義。為了進一步增加算法的適用范圍和可靠性,在后續的研究中,將考慮風浪、障礙物等因素的影響,探索不確定環境下的巡邊控制及路徑重規劃問題。 □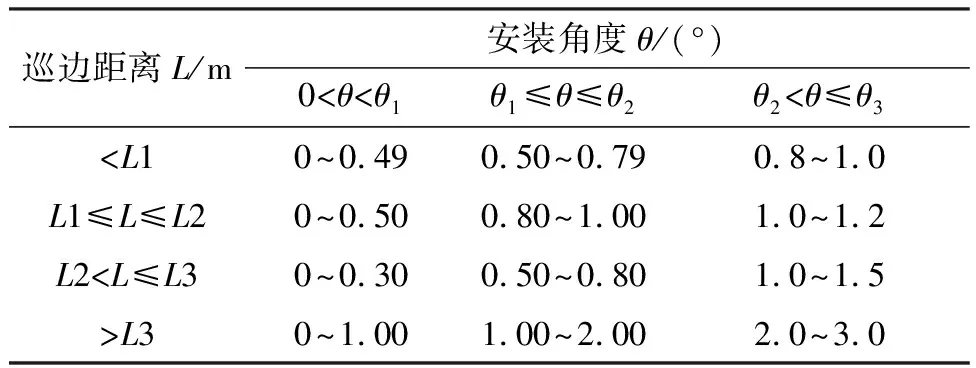
2 巡邊控制律設計
2.1 邊距區間搜索控制律
2.2 PID控制算法
3 仿真分析
3.1 池塘邊界仿真分析
3.2 速度與安裝角仿真分析
4 結論
