基于公理設計輔助智能船舶的錨泊輔助決策系統的開發
2021-09-03 16:35:40李志鵬鄭曉光張麗波馬學娜張鳳偉薛莉莉
科技創新與品牌 2021年7期
李志鵬 鄭曉光 張麗波 馬學娜 張鳳偉 薛莉莉
摘要:系統設計過程中的概念設計是關鍵階段,通過對系統的功能-原理分析建立系統架構,系統架構決定了后續系統開發的工作難度。公理設計理論為設計過程分解提供了理論依據,應用功能獨立性公理的分析框架,通過在功能域和結構域的“之字形”映射變換,進行功能結構分解,建立相對獨立的產品功能結構等級樹。根據設計分解得到的功能結構等級樹、完整設計矩陣和產品設計流程圖,在考慮產品設計任務之間相互影響關系的前提下,確定其順序及其組織形式,從而構建系統架構。本文用該方法對智能船舶的錨泊輔助決策系統的開發進行分析,建立相對獨立的功能架構,降低系統的復雜性并優化系統。
關鍵詞:公理設計;產品設計過程重組;并行工程;錨泊;輔助決策
引? 言
船舶在進行檢疫、候潮、錨地過駁、避風、等泊位等情況下,常需拋錨停泊。而錨泊船由于受風、浪、流等外力因素的作用可能發生走錨,從而導致碰撞、觸礁、擱淺等事故發生。
公理設計是一種基于數學原理的設計理論,通過數學原理的描述或符號化處理建立數學模型或設計方程和基于規則的方法,實現產品的功能屬性到結構屬性的復雜設計過程。本文是基于公理設計輔助進行智能船舶的錨泊輔助決策系統的開發,能夠更好地對船員提供信息及進行操作指導,盡量去除錨泊操作的人為不利因素,提高錨泊安全性。同時也為將來更進一步的智能化錨泊奠定基礎。
智能錨泊輔助決策內容
隨著海運事業的不斷發展,船舶數量不斷增加,錨泊事故也有上升趨勢,走錨會導致船舶碰撞、觸礁、擱淺等重大事故的發生。影響錨泊安全的主要因素有:首先,船體條件是影響錨泊安全的因素,包括船齡、船舶吃水、船舶噸位、主機和舵的性能等。其次,錨地條件對錨泊安全也是不可忽略的,不同的錨在不同地質的抓力,錨地水深,以及錨地風、浪、流等環境,以及錨地周圍錨泊船數量和位置對錨泊安全影響很大。另外,錨的系留力、出鏈長度和臥底鏈長的選擇、錨泊方式直接決定了錨泊安全性。總之,錨泊時,錨泊力是有限的,船舶不利的偏蕩運動導致錨鏈張力成倍增加,是走錨的主要原因。
通過分析影響錨泊安全的因素,并且通過對外界環境、船舶自身及設備和錨泊狀態的監測,進行受力分析、估算、判別等,給出錨泊建議和對錨泊安全監測及報警,并給出輔助決策,給出錨泊操作者準確參數及建議,以確保船舶的錨泊安全,目的是提高錨泊安全以及法律證據留存。
公理設計的輔助進行系統規劃設計
公理設計是20世紀90年代,美國麻省理工大學的Nam Suh教授提出的關于設計領域的科學理論,總結設計制造領域的理論規律。公理設計規范了設計分析過程,指導設計人員正確進行設計決策,判斷設計質量優劣。設計是“想得到什么”和“如何選擇以滿足需求”相互作用的過程,公理設計在相鄰兩個設計域的“之字形”映射變換將這種相互作用緊密地聯系在一起,左側設計域是設計者的目標,右側設計域是設計者實現目標的方法。通過相鄰的設計域之間的“之字形”映射變換,就可以建立功能要求、設計參數的等級結構,而且也相應地分析了每一級的設計變量的相互影響關系,確保其滿足功能獨立性公理的要求。
本文將公理設計的分析過程模型與產品設計過程重組模型結合,建立公理設計輔助的系統規劃設計模型。包括系統功能結構分析、定義系統功能模塊和系統架構設計等。確定準耦合功能關系,按序進行設計。
基于公理設計分析智能錨泊系統設計過程
公理設計的設計順序是從最高級出發,把基本功能要求分解為不同的子功能要求,直到整個設計任務完成,得到一個從抽象到具體的系統結構。首先應用公理設計,從需求出發確定基本功能,通過“之字形”映射變換,并以設計公理作為理論依據得到系統等級結構和流程圖;然后從等級結構的最底層入手,從低到高地組成最基本的系統模塊預期的功能。
3.1 應用公理設計的框架對智能船舶的錨泊輔助決策系統進行分析
從公理設計角度,要求智能船舶的錨泊輔助決策系統實現的總體功能是對錨泊系統的監測報警和輔助決策,為船舶操作者提供有效的建議,因此設計約束是保證錨泊安全。智能船舶的錨泊輔助決策系統的基本功能要求是FR:監測、報警和輔助決策;總體設計參數為DP:參數采集、計算分析、監控報警、輔助決策;設計約束CS:保證錨泊安全。
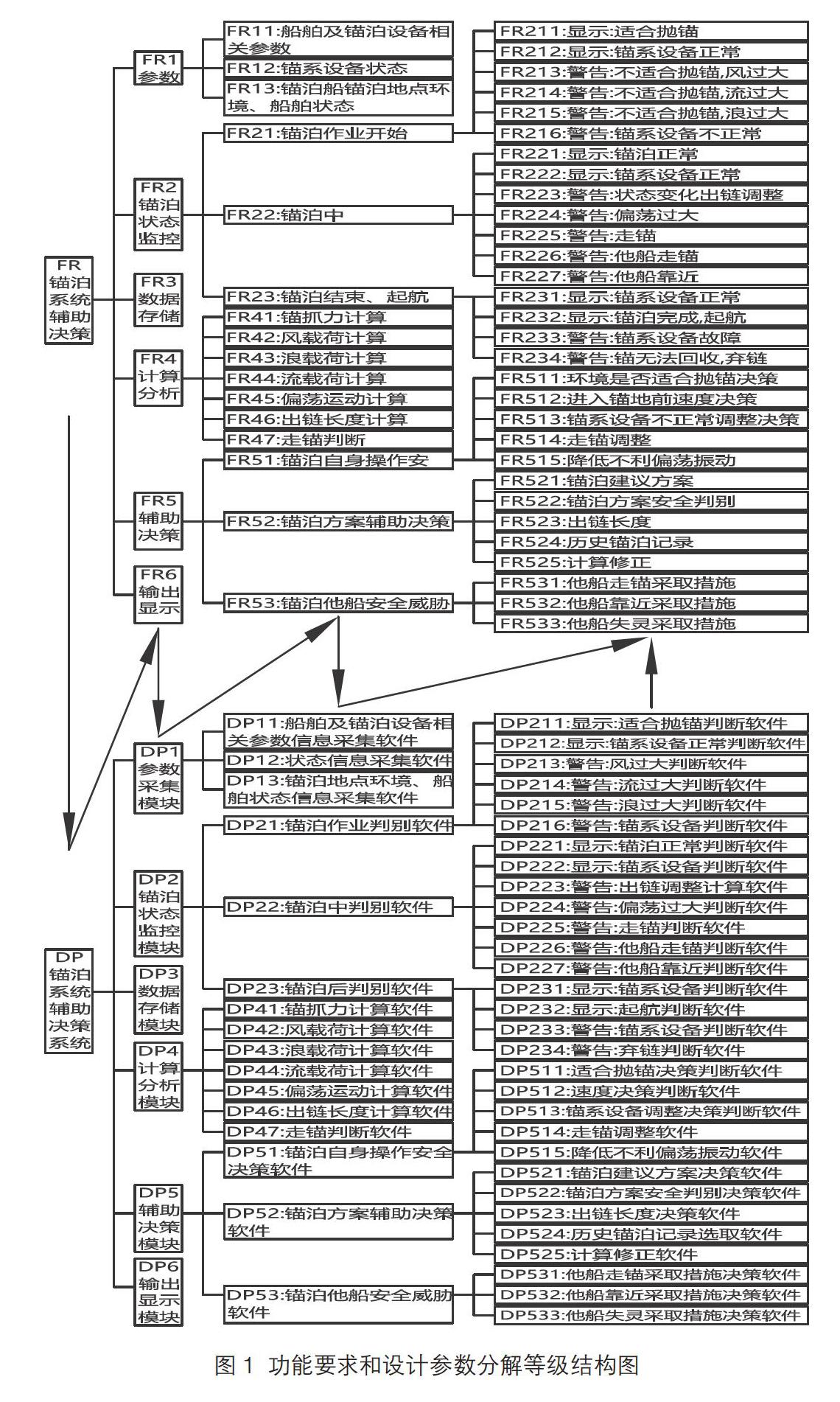
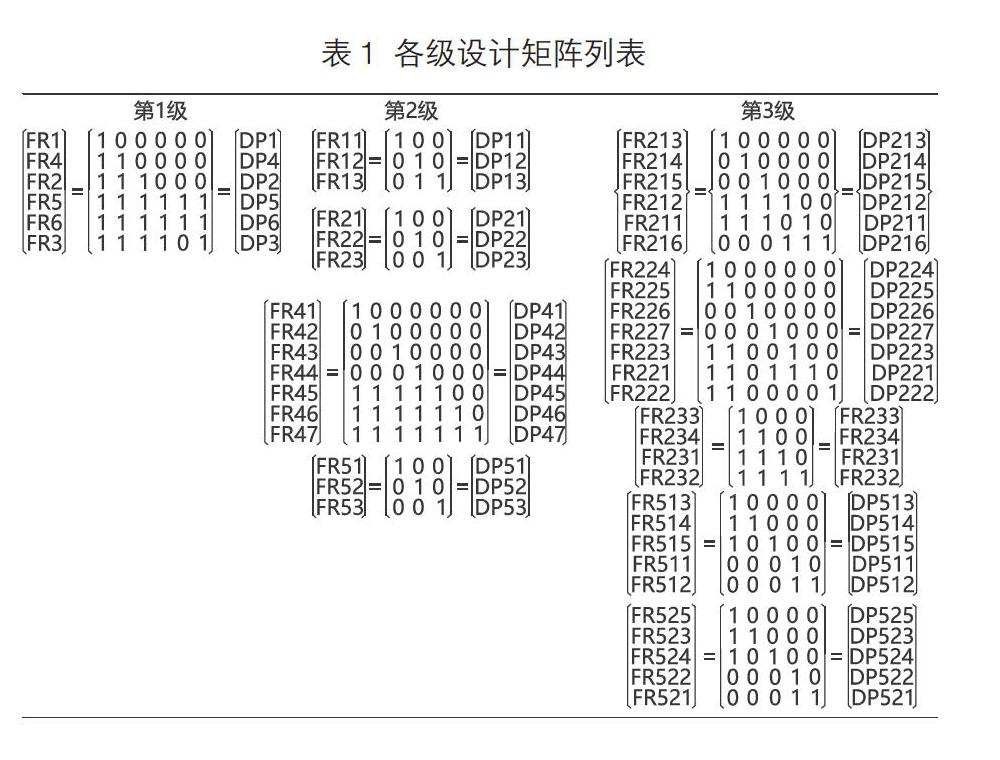
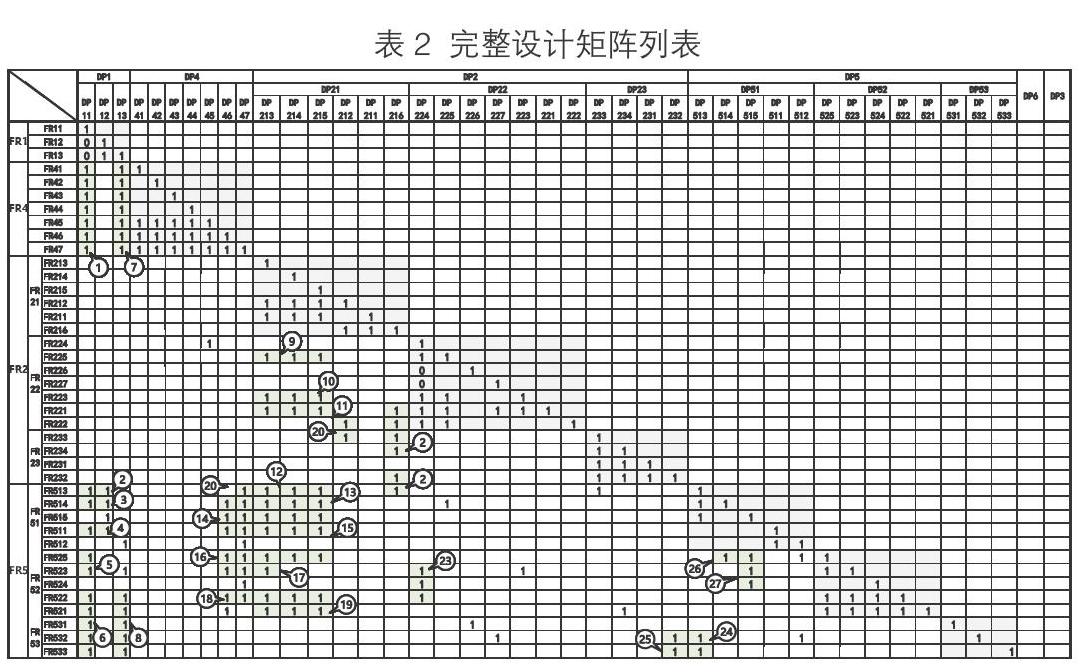
應用公理設計的分析框架,在功能域和結構域進行“之字形”映射變換,得到智能船舶的錨泊輔助決策系統的功能結構等級數(如圖1)、每一級的設計矩陣(如表1)和完整設計矩陣(如表2)。
設計矩陣和完整設計矩陣的元素“1”表示該元素所對應的功能要求受到其對應的設計參數變化的影響,即間接地描述了兩個功能要求之間的影響關系;元素“0”則表示兩者之間沒有相互影響。完整設計矩陣的非對角線元素表示同一設計分解分支的功能要求之間的相互影響關系,其余部分則表示不同分支的葉功能要求和葉設計參數之間的影響關系,關系操作描述如表3所示。
3.2 根智能船舶的錨泊輔助決策系統架構設計
智能船舶的錨泊輔助決策系統結構等級樹描述了智能船舶的錨泊輔助決策系統的組成和各個具體目標。設計活動就是實現這些目標為目的,組織多學科的設計開發隊伍,應用自身的專業知識和經驗,完成設計任務,實現設計產品預期功能。根據設計分解結果,智能船舶的錨泊輔助決策系統開發定義了42個設計活動,如表4。
通過分析,總結出一個描述智能船舶錨泊輔助決策系統設計順序的流程圖。根據智能船舶錨泊輔助決策系統設計的流程圖(圖2),確定設計的順序(圖中的M代表設計參數,即各個級別的設計參數看成不同級別的模塊)。整個智能船舶錨泊輔助決策系統由五個順序模塊M2錨泊狀態監測報警模塊→M1信息采集模塊→M3數據存儲模塊→M4計算分析模塊→M5決策輔助模塊→M6輸出顯示模塊組成。根據各級別設計矩陣和產品的等級結構樹,建立產品的設計流程,如圖3所示,通過分析完整設計矩陣和設計流程圖確定設計活動順序。
智能錨泊輔助決策系統架構設計
基于上述分析,智能船舶錨泊輔助決策方法系統的架構,包括一個工作站、一個信號采集單元以及一個輸出顯示單元,信號采集單元包括船舶參數采集子單元、錨系設備狀態信息采集子單元和環境船舶狀態數據采集子單元,分別用來采集環境、船舶以及錨系設備的實時信息。
由信息采集單元采集所需數據及信息,分別提供給工作站中的錨泊狀態監測報警單元、計算分析單元、輔助決策單元和輸出顯示單元。計算分析單元進行計算后,提供計算結果給錨泊狀態監測報警單元和輔助決策單元,用于報警和輔助決策的分析。在收取到錨泊狀態監測報警并反饋給輔助決策系統后,船舶操作者改變了船舶的操作,計算分析模塊通過信息采集模塊數據重新計算,并將計算結果反饋給監測報警和輔助決策單元,重新對報警和輔助決策進行分析。全部模塊數據在存儲模塊中存儲,根據船舶操作者的需求選擇在輸出顯示單元中顯示環境狀態、船舶狀態、船舶設備參數、錨系設備狀態、錨泊狀態監控報警、錨泊建議方案、錨泊輔助決策、錨泊記錄、船岸互聯等信息。
結? 語
本文是在船舶智能化、自動化快速發展的背景下,根據智能船舶錨泊系統的需求,結合相關技術文獻及資料,進行的智能船舶錨泊輔助決策方法及系統設計。得出了系統的架構及以下結論:
(1)智能船舶錨泊輔助決策系統包括數據參數采集模塊、錨泊狀態監測報警模塊、計算分析模塊、輔助決策模塊、存儲模塊等通過數據處理模塊進行數據信息的交互與處理,經輸出顯示模塊進行顯示和輸出。
(2)通過多個計算公式均輸入計算分析模塊中,也可將相關軟件嵌入到計算分析模塊中。根據已知的計算方法進行多重計算及分析,通過計算結果和實際狀態以及歷史數據對比優選,并最終得到理想結果。
(3)通過輔助決策模塊與數據處理模塊數據交互及其自身程序,實現錨泊建議方案、錨泊安全判別、走錨后采取措施、出鏈長度、錨泊信號等輔助決策等功能。
責編/馬銘陽