
新型雙液壓機械臂式叉車設計
2021-09-10 20:54:00遲政勛郝繪坤張彥波
家園·電力與科技 2021年5期
遲政勛 郝繪坤 張彥波

摘要:隨著國家現代化建設的飛速發展,科學技術的不斷進步,世界能源的不斷短缺,國際上對現代施工項目對叉車起重機的要求也越來越高,高、深、尖、高效節能的液壓技術在起重系統上的應用也越來越廣泛,叉車起重液壓系統展示了強大的發展趨勢。相比門架鏈條起重系統,液壓起重系統不僅具有移動方便,操作靈活,易于實現不同位置的堆垛等優點,對其進行驅動和控制的操作系統易于實現改進設計。隨著液壓起重技術的不斷發展,液壓起重系統已經成為各起重機生產廠家主要發展對象。液壓起重系統是一種應用廣泛的工程機械,具有作業速度快,適應性強,自備動力,能在野外作業,操作簡單,靈活等優勢。因而在交通運輸、城建、物料廠、基建、急救、救災等領域得到廣泛應用,加上現在倡導節能環保,所以我們應該加大改進力度,讓液壓起重系統適應性更大。
關鍵詞:叉車;機械臂;液壓系統;SolidWorks motion運動仿真
1新型雙液壓機械臂式叉車設計概述
本設計新型雙液壓機械臂式叉車基于液壓技術優點改進傳統叉車門架起重的作業方式,提高叉車作業效率,增強叉車短距運輸穩定性以及駕駛員的駕駛舒適度和安全性,為叉車設計提供新的思路、新的方向。
2新型雙液壓機械臂式叉車的研究方法和創新點
通過查閱大量與叉車和液壓臂相關的資料,對液壓臂以及現存的叉車發展歷程做了充分的了解。在叉車生產工廠中進行生產測試,通過軟件進行受力分析,優化現有叉車的起重結構,對比分析優化結構前后的效果和效率,對國內叉車行業的發展提供參考和依據。
創新點:
(1)解決門架起重系統鏈條傳動比不同、鏈條易壞斷裂造成堆垛作業效率低,維修頻繁問題;
(2)解決門架起重系統遮擋作業與駕駛視野問題;
(3)解決門架起重系統作業時穩定性差,精度低,作業質量有待提高問題;
(4)解決門架起重系統反應慢,耗能高問題。
3新型雙液壓機械臂式叉車的整體方案設計
3.1整體架構的設計
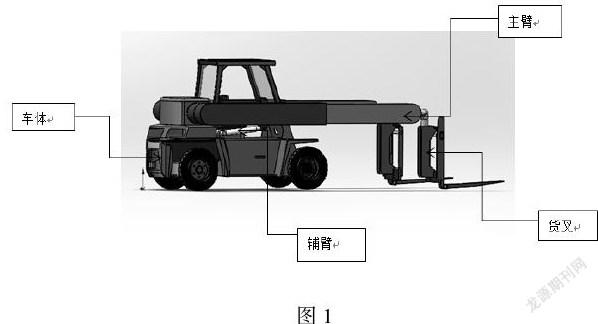
本設計提出用雙液壓機械臂替代傳統門架式起重方式,在市場現有叉車基礎上進行重點設計液壓機械臂,液壓機械臂主要由驅動部分、執行部分、檢測反饋部分、傳動部分等多系統結構組成。
液壓機械臂液壓驅動系統的技術要求的明確及液壓部分原理的設計。針對液壓機械臂的驅動機構,液壓驅動的特點與其他驅動方式相比在工程機械應用領域中優勢突出。分析液壓基本回路的工作原理與特點,結合液壓機械臂系統的總體方案,確定了其工作條件以及各種性能指標,得到液壓系統的主要設計技術參數,從而初步設計出該液壓機械臂式叉車原理圖(如下圖所示)。
3.2液壓機械臂系統的控制方法研究
在液壓機械臂的控制方法研究中,不同控制目標采用的控制策略不同。為提高能源利用率,液壓系統的輸出需和負載所需應相對應。研究分析負載敏感方法的特點,使得系統本身能夠接受到負載的變化信號,并轉化為相應的液壓參數的需要,將需求傳遞轉變為敏感閥芯的移動,使得泵的工作狀態發生改變,按照負載所需壓力值、流量值等往系統供給相應的油液。
3.3液壓臂活塞桿位移仿真分析
為分析其液壓臂活塞桿位移軌跡,按照液壓臂系統的實際運行情況,利用SolidWorks motion運動仿真軟件對液壓臂系統進行一個運動周期的仿真實驗,最后得出了主臂液壓活塞桿和輔臂液壓活塞桿的位移仿真曲線圖,如圖2、3所示。從圖2看出,在0~2.7(s)內,主臂活塞桿緩慢回縮,在2.7s時,主臂活塞桿運行至最底端,此時貨叉裝完貨物準備起升;在2.7~5.6(s)內,主臂活塞桿迅速前升,在5.6s時,主臂活塞桿運行至最前端,此時貨叉被主臂托至最頂端;在5.6~7.0(s)內,主臂活塞桿迅速回縮,直至回縮至初始狀態,此時恢復至初始狀態。
從圖3可以看出,在0~2.6(s)內,輔臂活塞桿一直在緩慢回縮,為提升做準備;在2.6~4.0(s)內,輔臂活塞桿迅速前升,在4.0s時,輔臂活塞桿運行至最頂端,此時貨叉在提升過程中始終維持一定的角度范圍內,;在4.0~5.6(s)內,輔臂活塞桿迅速回縮,然后回轉至一定的角度,;在5.6~7.0(s)內,輔臂迅速回縮至初始狀態,此時貨叉恢復至初始角度。
利用SolidWorks motion對叉車模型進行運動仿真的結果符合實際情況,通過這些結果能夠直觀的對裝載機液壓臂活塞桿的運動情況進行了解,進而做進一步的分析。
3.4液壓機械臂性能要求
(1)在工作狀態下,要求液壓系統在連續工作狀態下,能夠自動調節輸出功率,僅在需要高功率時大功率輸出,以降低系統的功耗損失,達到節約能源的作用。
(2)液壓臂執行元件及驅動元件如液壓缸等都要求運動過程中平緩穩定,液壓缸、液壓馬達等應具有過載保護措施,因為自重很大,要求擁有較好制動能力與抗抖動能力。
(3)液壓臂在不同的工況下需要實現空間內的自由移動和大跨度軌跡作業,在滿足工作條件的自由度要求的同時,還需要保證液壓臂具有足夠的剛性。
4結語
對于全液壓起重系統,來自汽車發動機的動力經油泵轉換到工作機構,其間可以獲得很大的傳動比,省去了鏈條機械傳動所需的復雜而笨重的傳動裝置。不僅使結構緊湊,而且使整機重量大大的減輕,增加了整機的起重性能。同時還將旋轉運動變為平移運動,易于實現起重機的變幅和自動伸縮。各機構使用管路聯結,能夠得到緊湊合理的結構,改善了發動機的技術特性。便于實現自動操作,改善司機勞動強度和條件。由于元件操縱可以微動,所以作業比較平穩,從而改善起重機的安裝精度,提高作業質量。采用液壓傳動,在主要機構中沒有劇烈的干摩擦副,減少了潤滑部位,從而減少了維修和技術準備時間。
參考文獻:
[1]成大先.機械設計手冊·機構(單行本)[M].北京:化學工業出版社,2004.
[2]馮國勇.裝載機液壓臂活塞桿運動仿真分析[J].西安:
[3]吳高陽.SolidWorks2010有限元、虛擬樣機與流場分析從入門到精通[M].北京:機械工業出版社,2010.
猜你喜歡
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
東方教育(2016年3期)2016-12-14 20:51:31
中國教育技術裝備(2016年20期)2016-12-12 10:03:08
企業技術開發·中旬刊(2016年10期)2016-11-12 16:11:54
計算機教育(2016年7期)2016-11-10 09:01:27
大學教育(2016年9期)2016-10-09 08:45:14
科技視界(2016年20期)2016-09-29 11:42:34
中國科技博覽(2016年9期)2016-04-25 10:13:28
