互通式立交分流影響區安全性評價研究綜述
2021-09-10 07:22:44張思捷
交通科技與管理 2021年21期
張思捷

摘 要:為了明確互通式立交分流影響區的安全性評價研究進程,為提高互通立交的道路行車安全性提供設計基礎,幫助科學、妥善的解決互通式立交分流影響區的行車安全問題,收集并整理相關文獻及數據,對互通式立交分流影響區安全性評價體系的研究現狀熱點、研究成果以及可進行深入研究的內容進行綜合評述。通過對文獻的總結發現當前應用到互通立交分流影響區安全性評價研究中的主要有五大基礎理論、兩大種類評價方法以及四種經典研究模型。其中,交通流理論是交通學科最基礎的理論支撐;兩種評價方法各有特點及長短,兩者結合才能將作用最大化;各研究模型關聯密切,被廣泛應用于模擬仿真中,為安全評價研究做出重大貢獻。目前,中國在交通安全研究基礎理論和技術應用方面均取得了優秀成果,但仍需進行進一步研究。
關鍵詞:互通立交;分流影響區;交通安全;安全性評價
0 引言
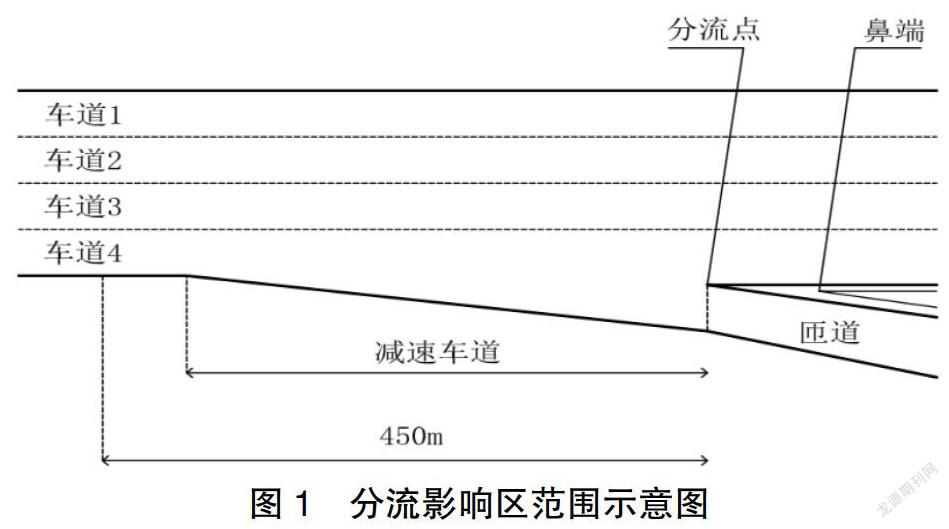
互通式立體交叉(簡稱互通立交)是指設置跨線構造物使得相交道路空間分離,且上、下道路間通過匝道連接以供轉彎車輛行駛的交叉方式。車輛在互通立交區域交互行駛,形成了交通流的分流區、合流區以及交織區。分流區是指在出口匝道附近,承接從主線車流分離出來的一股或多股車流的部分區域。受車輛分流行為最嚴重的區域是出口匝道和主線連接點至上游450 m內包含減速車道和主線外側2條車道的區域(如圖1所示)被稱為分流影響區。該區域交通流紊亂程度大,交通沖突頻發,存在較大交通安全隱患[1]。
本文擬對互通式立交分流影響區已有的安全性評價基礎理論、評價方法及模型等進行梳理、總結和展望。
1 互通立交分流影響區安全性評價基礎理論
1.1 交通流理論
交通流理論是采用由Greenshields[2]最初提出的“流量-速度-密度”模型描述道路上車輛(或非機動車/行人)與道路設施和環境交互運行規律的基礎學科。當前,交通流理論研究熱點包括了交通流基本圖模型、微觀交通流理論及仿真、中觀交通流理論及仿真、宏觀交通流理論以及網絡交通流理論五個部分[3]。交通流基本圖模型中,包含了瓶頸點(移動瓶頸點和固定瓶頸點)的交通流三參數關系分析可有助于分流影響區的交通流特性研究。此外,微觀、中觀和宏觀交通流理論及仿真技術因其具有可重復性、可延續性模擬交通運行狀態的優點,其相關理論和模型逐漸被應用于研究互通立交分流影響區的道路通行能力以及安全性水平評估。
1.2 運行速度協調理論
運行速度(v85)是指在自由交通流下測定的各類小汽車在車速累計分布曲線上第85%車輛的行駛速度[3]。運行速度協調是指在不同道路、交通和道路環境的條件下,相鄰路段的運行速度或速度梯度以及同一路段的運行速度與設計速度差值處于規定值內,達成速度的總體協調性[4]。以運行速度協調理論為基礎的道路安全性評價是指,通過實測或預測不同線形組合路段的運行速度分布、變化規律,分析運行速度協調性以此評價道路線形設計的連續性、均衡性以及合理性,并確定可能存在安全隱患的風險路段,以此優化線形設計或采取針對性改善措施[5]。
1.3 交通沖突理論與間隙接受理論
1.3.1 交通沖突理論
交通沖突是指道路使用者在行駛過程中,與另一個道路使用者或道路設施在時間、空間上相互接近,若道路使用者不采取必須的交通行為,就會發生碰撞的交通現象。由于互通立交分流影響區短距離范圍內存在頻繁的由車輛變道、減速等駕駛行為引起的交通沖突,研究人員逐漸將基于交通沖突理論的技術應用于互通立交分流影響區安全性評價中。綜合了距離和速度因素的三大時間度量指標是為研究人員基于沖突理論進行安全評價時的常用指標[6]:(1)碰撞時間(Time to collision,TTC);(2)碰撞時間(Post Encroachment Time,PET);(3)車頭時距(Time Headway,TH)。此外,沖突率(百車沖突數)也是常用的交通沖突安全評價指標。在TTC的基礎上,研究人員又提出了用于交通安全評價計算結果和統計分布的暴露碰撞時間(Time Exposed TTC,TET)和累積危險碰撞時間(Time Integrated TTC,TIT)[7]。
相關的安全性評價指標是否能沿用交通沖突技術的評價指標以及安全評價指標闕值的選定仍然具有爭議性。另一方面,基于該理論的評價結論還需要與真實案例結合進行進一步檢驗其科學性及有效性。此外,交通沖突的數據采集與共享是亟需突破的重難點。
1.3.2 間隙接受理論
間隙接受理論是指,以間隙接受現象為基礎、臨界間隙為主要指標和方法,對車輛分流行為進行建模仿真分析,間接對研究區域的安全性評價進行分析的基礎理論。車輛間隙(Gap)是指前車恰好完全經過沖突點時前車車尾與后車車頭的時間間隔[1]。間隙接受一般發生在具有優先通行權的支路交叉口處,根據主路車輛的到達規律產生了不同大小的車頭時距,支路車輛會對主路的車頭時距作出反應(車頭時距:經過同一斷面的相鄰前后車輛的車頭之間的時間間隔)。
1.4 交通行為理論
交通行為理論以人因工程(Human Factors Engineering)為核心,對行車過程中的駕駛人行為通過模擬仿真或儀器監控等手段對駕駛人心理及生理變化進行數據采集進行分析。對駕駛人的交通行為對道路行車安全性水平影響機理進行研究。基于交通行為理論的交通安全分析包括4個主要研究方向:駕駛人分心行為、注視特性研究、危險駕駛行為以及駕駛人變道與跟車行為研究。
2 評價方法
研究人員應用于互通立交分流影響區的安全性評價方法主要有主觀賦權評價法、客觀賦權評價法以及組合賦權法[8]。
2.1 主觀賦權評價法
主觀賦權評價法是指根據專家經驗對各項指標權重進行主觀判斷,并對各指標信息進行綜合評價。層次分析法(將與總目標有關的元素分級為目標層、準則層、指標層;在此基礎上進行定性分析和定量分析的評價方法)和模糊綜合評價法(根據模糊數學的隸屬度理論把定性評價轉化為定量評價,對受到多種因素制約的對象做出一個總體評價的方法)都屬于主觀賦權法的范圍內,兩種方法的單獨運用或者綜合運用,都具有主觀性,這對于評價結果具有一定的偏差影響。
2.2 客觀賦權評價法
客觀賦權評價法根據指標間的相關關系及指標值的變異程度確定權重的一類評價方法,應用到互通立交區域安全性評價的方法主要有灰色關聯度分析法和人工神經網絡分析法兩種。在進行互通立交分流影響區的安全性水平評價時,采用的方法多為兩種主觀賦權評價法;或是將主、客觀賦權評價法相結合。兩種方法定義及特點如表1所示。
3 安全性研究模型
對互通立交區域的交通安全進行安全性評估時,交通模擬仿真是一種常用的重要手段,建立模型則是模擬仿真手段的核心技術支撐。其中有四種經典模型在互通立交區域的交通安全性研究中得到了廣泛應用,分別是車輛跟馳模型、元胞自動機模型、換道模型以及交通沖突預測模型。
3.1 車輛跟馳模型
車輛跟馳模型(Car Following Model)是運用動力學方法來研究限制超車的單車道上行駛車隊中相鄰輛車之間的相互作用。其在交通安全領域具有廣泛的應用價值。跟馳模型包括了刺激-反應模型、安全距離模型(Safety Distance Model)、心理-生理模型以及人工智能模型(Artificial Intelligence Model)等四種[9]。由于互通立交分流影響區內存在頻繁的變道交通行為,因此交通安全領域的研究人員開始將跟馳模型應用到該領域有關行車安全的交通模擬中。
3.2 元胞自動機模型
元胞自動機(Cellular Automata,CA)是定義在具有離散、有限狀態的元胞組成的元胞空間按照一定的局部規則在離散時間維度上演化的動力學系統[3]。元胞自動機模型就是以該理論為基礎建立的,其中心思想是將路段劃分為N個元胞,利用各個元胞之間通過的車輛數來描述交通流的傳播過程。在交通安全領域,交通元素具有離散性,采用元胞自動機模型能有效避免建模時離散-連續-離散的近似過程,因此在交通安全評價仿真模擬研究中,該模型具有獨特的優越性。
3.3 換道模型
換道模型用于描述車輛行駛中變換車道的交通行為,車道變換行為是指駕駛人基于自身駕駛特性,結合周圍車輛的車速、車間距等環境信息,調整并完成自身駕駛目標策略的綜合過程。其模型和跟馳模型共同構成了傳統的微觀交通流動力學模型體系,跟馳模型描述的是車輛的縱向行為,換道模型描述的是車輛的橫向行為[10]。在互通立交分流影響區,換道行為頻繁發生,對該區域的交通安全及通行能力都會造成影響。換道模型已成為了分流影響區交通特性仿真研究中的核心模型。
3.4 交通沖突預測模型
交通沖突預測模型是指以交通沖突理論和交通沖突技術為基礎,利用沖突數據、道路線形以及交通流等數據,采用一定的數學方法對沖突數或沖突率進行預測的一類模型。在建成模型后,進一步建立綜合影響系數與沖突的關系模型,得到綜合影響系數對應的對應區域的安全評價結果。交通沖突預測模型研究發展迅速,其種類多達15種[6]。其中,回歸模型、廣義線形模型、BP神經網絡、時間序列、概率模型等被廣泛應用于分流影響區交通安全研究中。
4 結語
本文通過對文獻的梳理和總結,為讀者介紹了近年來互通立交安全性評價研究的發展成果。內容涵括了基礎理論、評價方法以及研究模型等三方面內容。近年來,隨著國家對交通安全研究的日漸重視,我國在該領域的基礎理論和技術應用方面均取得了顯著成績。主要體現在交通安全基礎數據采集、交通行為、交通事故致因探究等方面。此外,交通系統參與者的安全意識上升,道路主動行車安全的保障等方面都大有進益。然而,我國對于互通立交分流影響區等特有區域的安全性研究工作仍需從不同方面進行提高:
(1)國家規范文件對互通立交等特殊區域的安全性規定不夠完整、不具有針對性。應,加大在規范文件數據方面的整合及共享,盡快研究出互通立交等特殊區域的道路安全審計清單。
(2)互通立交道路交通安全研究基礎數據缺乏有效整合與共享,應完善交通基礎數據采集、集成及共享。
(3)在大數據、智能化發展背景下,應與時俱進,采用先進的技術,對交通參與者的交通行進行監測、分析、預測,為智能化交通安全研究提供有力的數據支撐,如采取“互聯網+交通安全”模式。
(4)道路交通安全的整體提升需要多部門共同協作完成。需各相關部門形成一個“系統”,共同致力于研究交通安全領域的理論、技術的完善和創新。
參考文獻:
[1]李涵.高速公路互通立交分流區交通沖突預測模型[D].南京:東南大學,2017.
[2]GREENSHIELDS B D,CHANNNING W,MILLER H. A Study of Traffic Capacity[C].CRUM R W.Proceedings of the Fourteenth Annual Meeting of the Highway Research Board.Washington DC:Highway Research Board,1935:448-477.
[3]《中國公路學報》編輯部.中國交通工程學術研究綜述[J].中國公路學報,2016,29(6):5-24+115-122.
[4]熊惠,孫小端,賀玉龍,等.高速公路運行速度與交通安全關系研究[J].交通信息與安全,2012,30(6):48-51+56.
[5]胡江碧,何祿誠,王榮華.高速公路互通立交安全性評價研究綜述[J].中國公路學報,2020,33(7):17-28.
[6]朱順應,蔣若曦,王紅,等.機動車交通沖突技術研究綜述[J].中國公路學報,2020,33(2):15-34.
[7]MICHIEL M,PIET B.Extended Time-to-collision Measures for Road Traffic Safety Assessment[J].AccidentAnalysis&Prevention,2001(33):89-97.
[8]李忠偉.中國高速公路用地社會經濟影響評價[D].北京:中國地質大學,2012.
[9]王殿海,金盛.車輛跟馳行為建模的回顧與展望[J].中國公路學報,2012,25(1):115-127.
[10]Zheng,Zuduo.Recent developments and research needs in modeling lane changing[J].Transportation Research Part B,2014(60):16-32.