飛機除冰液加熱與噴射系統管路壓力模糊控制
2021-09-11 09:29:42原志翔
工業加熱 2021年8期
原志翔
(西安航空職業技術學院,陜西 西安 710089)
除冰液加熱與噴射系統是保障飛機冬季航行安全的重要組成部分,而該系統在運行過程中往往伴隨著管路壓力的變化,對除冰系統的運行安全和加熱溫度產生一定的影響,這就需要在飛機除冰系統基本原理的基礎上對引起管路壓力的有關因素進行全面的分析。因此,本次研究通過模糊控制技術來調整除冰系統管路壓力,進而實現對管路壓力波動的有效控制。
1 飛機除冰液的基本特性
飛機除冰液是飛機除冰系統的熱量流動載體,通過外部加熱可以快速提升小型鍋爐內的壓力,進而使除冰液與水充分混合。由于除冰液具有較高的黏度,因此在升高溫度的情況下,其黏度系數、阻力系數等液力特性會出現一定的變化,進而改變熱系統管路阻力特性,最終表現為管路壓力波動,對小型鍋爐的安全和加熱效果產生負面影響[1-3]。
2 飛機除冰車管路系統概述
2.1 管路布局
飛機除冰系統管路的基本布局如圖1所示,在飛機除冰系統的作用下,小型鍋爐中的水和除冰液會按照一定比例充分混合,并通過加熱裝置以混合溶液進行加熱處理,同時通過加熱升壓的方式噴射混合溶液,噴槍自身也可以調節混合溶液的噴射流量。由此可見,飛機除冰系統是管路系統、泵、小型鍋爐、儲液箱等設備的集成體系[4-6]。
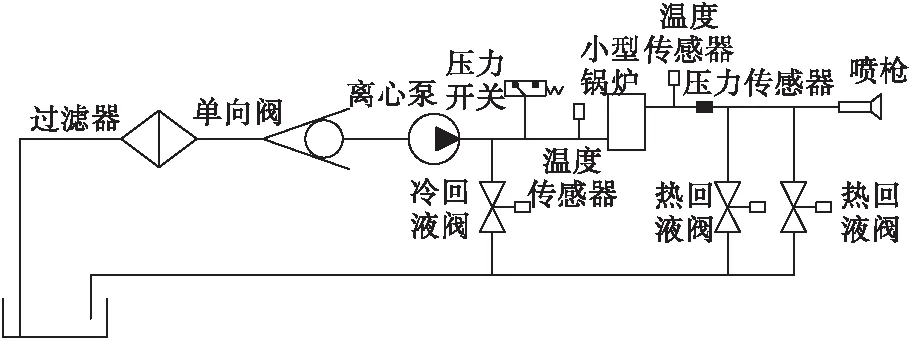
圖1 飛機除冰系統管路布局
2.2 管路系統運行模式
在飛機除冰車管路系統的實際應用中,其運行模式可以劃分為加熱模式、噴射模式和等待模式三種。
1)加熱模式
在儲液箱溫度較低的情況下,系統會對小型鍋爐進行預加熱處理,同時將熱回液閥打開,使除冰液回流至儲液箱,進而增加除冰液溫度,在除冰液溫度提升至5 ℃的情況下停止加熱,系統開啟等待模式[7-8]。
2)噴射模式
當需要進行除冰操作時,系統將由等待模式轉換為噴射模式。噴槍啟動后,管路系統會接收到來自噴槍的啟動信號,小型鍋爐開始運作,熱回液閥門自動關閉并噴射除冰液。待結束噴射后,鍋爐熄火,噴槍關閉,系統自動將回液閥打開并重新開啟等待模式[9]。
3)等待模式
管路系統在進入等待模式的情況下會自動調整噴射位置以準備下一次除冰,水泵繼續維持開啟狀態以提高作業效率,此時熱回液閥開啟,小型鍋爐停止點火,防止鍋爐因加熱過度而出現氣化問題。在完成調整之后噴槍再次開啟,進而恢復噴射模式[10-11]。
3 管路壓力波動控制
3.1 引起管路壓力波動的有關因素
管路系統在加熱管路的同時,壓力與溫度是相互關聯、相互耦合的一對參數。小型鍋爐升溫的過程同時也是壓力損失增加的過程。出于一般作業需要的考慮,除冰系統需要依照冰雪狀況來對噴槍的水花和流量進行調整。通常情況下,噴槍會在50~23 L/min的流量范圍內設置6個擋位,每一次擋位的變化均會使管路系統的壓力發生變化。尤其是在管路系統運行模式發生變化的情況下,系統需要切換冷、熱回閥,同樣會使管路產生壓力波動[12-13]。
3.2 控制方案
在噴槍流量發生變化的情況下,管路負載也會發生相應的改變,進而引起水泵工作點波動,出于管路系統壓力恒定方面的考慮,還需要在結合系統壓力偏差的基礎上通過調整變頻器來維持合理的系統壓力。在小型鍋爐管路不斷升溫的過程中,鍋爐在運行狀態下的流量與沿程阻力也會發生明顯的變化,致使管路系統體現出非線性的壓力變化,數學模型的建立難度也相應增加,因此需要基于實驗數據為管路壓力控制建立模糊控制策略。
4 模糊控制器設計方案
模糊邏輯是模糊控制的核心理論,模糊控制器本質上是一種基于現有知識而建立起來的控制路徑,通過語言變量對受控對象的特征加以描述,無需精確的數據指導,能夠基于人為設定的控制規則和系統的動態信息輸出控制信號,其應用優勢主要表現在動態響應快、魯棒性強、對參數變化不敏感等方面,在結構上主要包括模糊規則、被控對象、輸入量化和輸出量化等部分,基本原理如圖2所示。

圖2 模糊控制器基本原理
如圖2所示,r為輸入變量的給定值;U為輸出語言變量(解模糊化后);u為實際控制信號輸出值(經輸出量化后);e為輸入變量的誤差;ec為誤差的變化率;e與ec在經過輸入量化處理后,分別以E和EC為各自的語言變量。
4.1 精確量的模糊化
通過離散化處理的方式將輸入量偏差e劃分為幾個不同的等級。在設計過程中,本次研究分別對于誤差e的基本論域、模糊子集論域和語言變量的設定方案如表1所示。

表1 誤差e的變量設定方案
對于誤差ec的基本論域、模糊子集論域和語言變量的設定方案如表2所示。

表2 誤差ec的變量設定方案
對于誤差u的基本論域、模糊子集論域和語言變量的設定方案如表3所示。
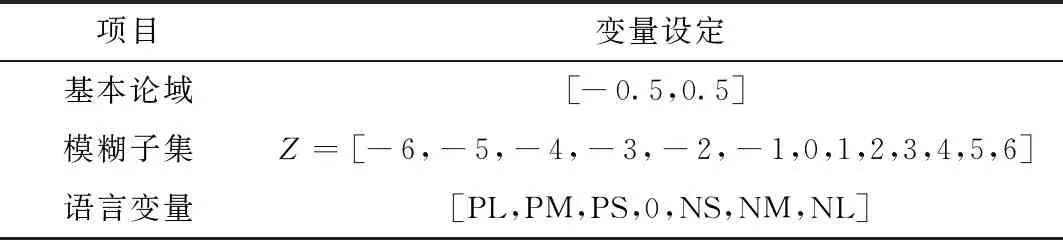
表3 誤差u的變量設定方案
出于計算便利性方面的考慮,本次研究通過三角形隸屬函數來描述各語言變量模糊子集的隸屬度函數。為了進一步提高管路系統壓力的響應速度,還需要通過隸屬函數曲線的形式來為語言變量E,EC,U賦值。另外,為了降低U語言變量值在零附近的覆蓋面積,增強系統的靈敏度和穩態精度,適當地提升了PL與NL的覆蓋面積,進而形成如圖3所示的語言變量賦值方案。

圖3 語言變量E、EC和U的賦值
4.2 模糊規則與推理
為了使模糊控制器達到最佳的靜態性能水平,需要在誤差較大的情況下及時將誤差消除,而在誤差較小的情況下,則需要通過對控制量的調整來降低穩態誤差。本次研究基于既有的管路壓力控制工作經驗以及相應的實驗觀察,總結出以下幾項控制規則:
IFE=PL ANDEC=PS THENU=NL
IFE=PL ANDEC=PL OREC=PM THENU=NL
…
在上述規則的基礎上,借助模糊集合對語言變量加以轉換,進而建立如下所示的模糊關系矩陣:
R=U∪(E×EC)
該模糊關系可用來對模糊控制器的輸入、輸出特性加以描述,在完成模糊關系的建立工作后,根據模糊合成規則和輸入變量的語言值即可生成如表4所示的模糊控制表。

表4 管路壓力模糊控制規則表
4.3 建立控制查詢表
建立控制查詢表,首先要將模糊子集U轉換為明確的控制信號,在實際操作中可以通過重心法對模糊控制器所生成的模糊子集加以明確,最終生成模糊控制器查詢表,由計算機根據查詢表向受控對象發出指令,最終實現對于飛機除冰車管路壓力的模糊控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2020年4期)2020-05-30 12:35:30
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生作文(中高年級適用)(2018年3期)2018-04-18 01:24:47
家庭影院技術(2017年9期)2017-09-26 03:41:45
瘋狂英語·新策略(2017年8期)2017-05-31 08:13:46
華北電力大學學報(社會科學版)(2016年4期)2016-12-01 03:59:30
