搬運(yùn)機(jī)器人的結(jié)構(gòu)創(chuàng)新設(shè)計(jì)
2021-09-13 15:11:39馬立勇李超逸郭周鵬李連輝
無(wú)線互聯(lián)科技 2021年8期
馬立勇 李超逸 郭周鵬 李連輝
摘 要:文章介紹了一款利用超聲波定位跟隨人或物的智能搬運(yùn)機(jī)器人的機(jī)械設(shè)計(jì)及上臺(tái)改進(jìn)。采用麥克納姆輪,使得機(jī)器人的運(yùn)行、跟人更加流暢,采用M3508電機(jī)和C620電調(diào)將功能發(fā)揮到極致,并介紹了設(shè)計(jì)分析、搬運(yùn)系統(tǒng)的實(shí)施方案和自動(dòng)跟人系統(tǒng)帶來(lái)的自主越障。
關(guān)鍵詞:麥克納姆輪;M3508電機(jī);自主越障
0 引言
搬運(yùn)機(jī)器人的共同點(diǎn)是移動(dòng)路線單一甚至是無(wú)法移動(dòng),只能在規(guī)定路徑或者是固定在某一地點(diǎn)進(jìn)行搬運(yùn)工作[1]。這種工作模式在工作過(guò)程中的局限性很大,只能解決搬運(yùn)流程中的某一個(gè)節(jié)點(diǎn)的工作,機(jī)器自身的工作性能不能得到最大化的利用[2-4]。
本款機(jī)器人是一種能夠半自主或全自主工作的智能機(jī)器,機(jī)器人具有感知、決策、執(zhí)行等基本特征,可以輔助甚至替代人類完成危險(xiǎn)、繁重、復(fù)雜的工作,提高工作效率與質(zhì)量,服務(wù)人類生活,擴(kuò)大或延伸人的活動(dòng)及能力范圍。
目前現(xiàn)有的一種場(chǎng)地支援用可分類搬運(yùn)的機(jī)器人,在人員進(jìn)行場(chǎng)地支援時(shí),需要將物料搬運(yùn)走,但是部分物料混雜放置,在分類搬運(yùn)時(shí)較為不便,所以現(xiàn)提出一種新型的場(chǎng)地支援用可分類搬運(yùn)的機(jī)器人[5]。
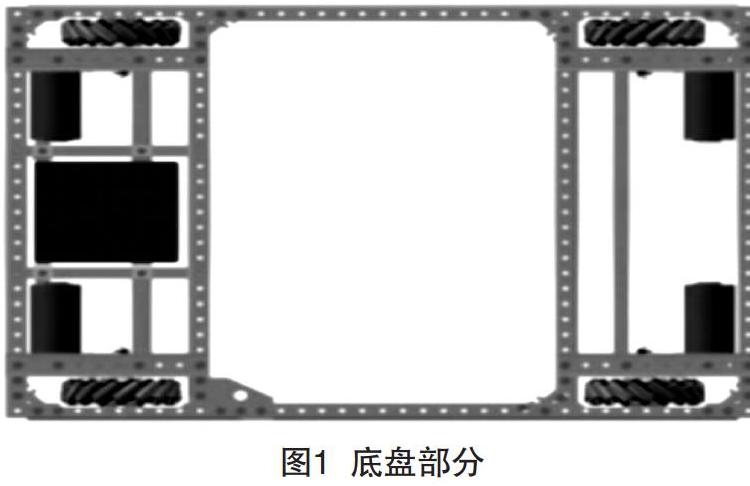
1 底盤部分
本款機(jī)器人包括箱體,箱體的正面通過(guò)凹槽活動(dòng)連接放置抽屜,放置抽屜上表面的中部固定連接分隔板,分隔板的左側(cè)固定連接固定板,固定板的兩側(cè)均固定連接伸縮彈簧,伸縮彈簧的一端固定連接連接板,分隔板的右側(cè)固定連接固定夾。
人員可以將物品分類放置在放置抽屜內(nèi),通過(guò)伸縮彈簧、連接板和固定夾的搭配設(shè)置,繼而可以將物品固定,從而避免人員在移動(dòng)該裝置時(shí)物品來(lái)回碰撞,使物品避免受到損傷,通過(guò)限位環(huán)的設(shè)置,便于人員放置放置盤,從而增加了物品的放置面積,且便于人員放置,提高了該裝置的實(shí)用性。
機(jī)器人內(nèi)部主要分為驅(qū)動(dòng)部分、超聲波模塊,分別放置于小車四周,承載部分放置于下底盤之上,如圖1所示。
2 驅(qū)動(dòng)部分設(shè)計(jì)
輪子選用麥特納姆輪,麥特納姆輪由輪轂和輥?zhàn)咏M成。麥克納姆輪結(jié)構(gòu)緊湊,運(yùn)動(dòng)靈活,是一款很實(shí)用的全方位輪,通過(guò)4個(gè)同樣的輪子進(jìn)行組合,可以更靈活方便地實(shí)現(xiàn)全方位移動(dòng)功能。并且麥克納姆輪負(fù)載能力極強(qiáng),即使在狹小的空間內(nèi)也可以進(jìn)行靈活的移動(dòng)。
電機(jī)與電調(diào)分別選用M3508和C620。M3508減速電機(jī)由電機(jī)與減速器完美集成,配備擁有FOC控制技術(shù)的C620電調(diào),能將功能發(fā)揮到極致。電機(jī)將電能轉(zhuǎn)化為動(dòng)能,而電調(diào)則根據(jù)控制信號(hào)調(diào)節(jié)電機(jī)的轉(zhuǎn)速,兩者構(gòu)成了動(dòng)力系統(tǒng),可對(duì)小車進(jìn)行完美控制,且M3508動(dòng)力系統(tǒng)最大功率高達(dá)220 W,最大扭矩5 N·m;最大持續(xù)功率150 W,持續(xù)扭矩? ? ? ? ? 2.8 N·m,有感FOC控制不論轉(zhuǎn)速高低都能提供穩(wěn)定的扭矩,讓機(jī)器人在快速響應(yīng)的同時(shí)保持平穩(wěn)的動(dòng)力。同時(shí)電機(jī)體積較小 動(dòng)力系統(tǒng)支持PWM信號(hào)輸入控制和CAN總線指令控制。據(jù)測(cè)試M3508電機(jī)功率220 W的概念,4個(gè)四驅(qū)的機(jī)器人能夠拉動(dòng)一輛五菱宏光面包車。而此電機(jī)體積較小,實(shí)現(xiàn)了空間的高利用率,給予了機(jī)器人足夠的布線空間。
3 搬運(yùn)實(shí)施方式設(shè)計(jì)
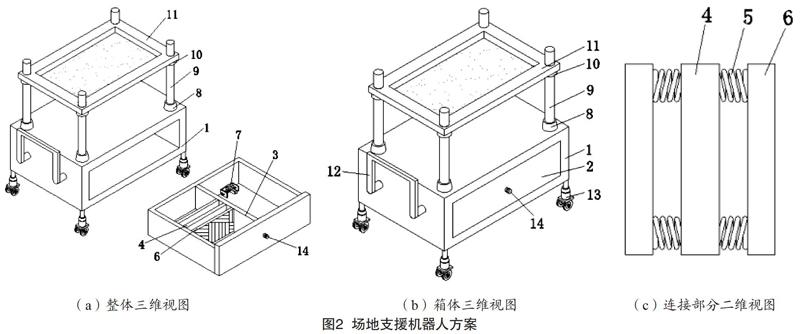
根據(jù)圖2場(chǎng)地支援機(jī)器人提供一種技術(shù)方案:一種場(chǎng)地支援用可分類搬運(yùn)的機(jī)器人,包括箱體1,箱體1外表面的左側(cè)固定連接固定把手12,箱體1底部的四角處均固定連接活動(dòng)輪13,活動(dòng)輪13的內(nèi)部設(shè)置剎車片,箱體1上表面的四角處均固定連接有連接環(huán)8,連接環(huán)8的頂部固定連接固定柱9,固定柱9的表面固定連接限位環(huán)10,限位環(huán)10的頂部活動(dòng)連接放置盤11,放置盤11上表面的中部開設(shè)有放置槽,箱體1的正面通過(guò)凹槽活動(dòng)連接放置抽屜2。
通過(guò)放置抽屜2、伸縮彈簧5、連接板6、固定夾7、限位環(huán)10和放置盤11的搭配設(shè)置,使得人員在使用時(shí),可以將物品分類放置在放置抽屜2內(nèi),通過(guò)伸縮彈簧5、連接板6和固定夾7的搭配設(shè)置,繼而可以將物品固定,從而避免人員在移動(dòng)該裝置時(shí)物品來(lái)回碰撞,避免物品受到損傷,通過(guò)限位環(huán)10的設(shè)置,便于人員放置托盤11,從而增加了物品的放置面積,且便于人員放置,從而提高了該裝置的實(shí)用性。
放置抽屜2的表面固定連接拇指把手14,放置抽屜2上表面的中部固定連接分隔板3,分隔板3的左側(cè)固定連接固定板4,固定板4的兩側(cè)均固定連接伸縮彈簧5,伸縮彈簧5的一端固定連接連接板6,連接板的表面設(shè)置有橡膠墊,分隔板3的右側(cè)固定連接固定夾7。
根據(jù)上述方案所述,在機(jī)器人的工作過(guò)程中,人員通過(guò)將所需物品放入抽屜,再通過(guò)伸縮彈簧、連接板和固定夾將物品固定在抽屜中,可避免該設(shè)備在行進(jìn)過(guò)程中由于碰撞而導(dǎo)致的物品及設(shè)備內(nèi)部的損傷,采用限位環(huán)裝置更易于將托盤放置到固定柱上,從而使物品的放置面積得到了有效擴(kuò)大,也更利于人員放置物品,大大提高了搬運(yùn)效率和設(shè)備的實(shí)用性。
4 結(jié)語(yǔ)
本文詳細(xì)設(shè)計(jì)了新型搬運(yùn)機(jī)器人的結(jié)構(gòu),該搬運(yùn)機(jī)器人能夠分類存儲(chǔ)不同物品,具有一次性搬運(yùn)多種物品的功能,在實(shí)際應(yīng)用中可完成危險(xiǎn)、繁重、復(fù)雜的工作,極大地提高了工作效率,延伸了工作范圍,能夠在危險(xiǎn)物品探測(cè)運(yùn)輸、冬奧會(huì)賽場(chǎng)物品運(yùn)輸?shù)刃枨笾械靡赃\(yùn)用。
[參考文獻(xiàn)]
[1]郝陽(yáng). 關(guān)節(jié)式履帶移動(dòng)機(jī)器人自主越障行為控制[D].北京:北京理工大學(xué),2015.
[2]朱佑滔,何志琴,施文燁.基于視覺的智能搬運(yùn)機(jī)器人實(shí)驗(yàn)平臺(tái)[J].電子世界,2020(16):49-52.
[3]周航,朱翰宸,李園園,等.基于麥克納姆輪的擺式懸掛系統(tǒng)設(shè)計(jì)及其運(yùn)動(dòng)學(xué)分析[J].電子制作,2020(9):65-66,59.
[4]蔡磊,周亭亭,郭云鵬,等.基于超聲波定位的智能跟隨小車[J].電子測(cè)量技術(shù),2013(11):76-79.
(編輯 王雪芬)

- 無(wú)線互聯(lián)科技的其它文章
- 高職新一代信息技術(shù)集群專業(yè)行業(yè)企業(yè)人才需求及分析
- “1+X”證書制度下計(jì)算機(jī)網(wǎng)絡(luò)專業(yè)學(xué)生的職業(yè)生涯管理探究
- “計(jì)算機(jī)應(yīng)用基礎(chǔ)”微課程的設(shè)計(jì)與開發(fā)
- 基于移動(dòng)終端支持的通識(shí)課混合式教學(xué)設(shè)計(jì)
- 基于互聯(lián)網(wǎng)技術(shù)的物理化學(xué)實(shí)驗(yàn)教學(xué)模式探究
- “信號(hào)與系統(tǒng)”課程的移動(dòng)學(xué)習(xí)模式探索及實(shí)踐