虛擬現(xiàn)實(shí)學(xué)習(xí)環(huán)境下力反饋交互促進(jìn)技能習(xí)得的實(shí)驗(yàn)研究
2021-09-14 08:30:00沈陽王兆雪潘俊君禹鵬鐘寧
電化教育研究 2021年9期
沈陽 王兆雪 潘俊君 禹鵬 鐘寧


[摘? ?要] 虛擬現(xiàn)實(shí)技術(shù)變革傳統(tǒng)教育,已經(jīng)縱深至醫(yī)學(xué)、建筑學(xué)等學(xué)科領(lǐng)域。文章圍繞“知能發(fā)展”這一創(chuàng)新人才培養(yǎng)目標(biāo),以技能習(xí)得為研究主題,通過分析傳統(tǒng)醫(yī)學(xué)教育中手術(shù)技能習(xí)得難以實(shí)現(xiàn)的諸多困境,提出虛擬現(xiàn)實(shí)技術(shù)構(gòu)建的學(xué)習(xí)場(chǎng)景能夠促進(jìn)學(xué)習(xí)績(jī)效提升,并以此開展了實(shí)證研究。準(zhǔn)實(shí)驗(yàn)基于我國(guó)自主研發(fā)的虛擬手術(shù)系統(tǒng),面向北京航天總醫(yī)院手術(shù)技能培訓(xùn)實(shí)驗(yàn)中心的醫(yī)學(xué)臨床高年級(jí)學(xué)生進(jìn)行。在GOALS評(píng)價(jià)框架下,探究VR學(xué)習(xí)環(huán)境中,力反饋交互對(duì)手術(shù)技能習(xí)得在深度感知、組織處理能力、雙手協(xié)調(diào)性和手術(shù)效率方面的影響。研究表明:加入力反饋交互學(xué)習(xí)可正向影響手術(shù)技能習(xí)得。結(jié)合數(shù)據(jù)分析、專家和被試訪談,提出研究啟示,為VR智能醫(yī)教的應(yīng)用發(fā)展提供借鑒。
[關(guān)鍵詞] 虛擬現(xiàn)實(shí); 虛擬手術(shù); 技能習(xí)得; 力反饋交互; 智能醫(yī)教
[中圖分類號(hào)] G434? ? ? ? ? ? [文獻(xiàn)標(biāo)志碼] A
[作者簡(jiǎn)介] 沈陽(1983—),女,安徽宿州人。助理研究員,博士,主要從事智慧學(xué)習(xí)環(huán)境設(shè)計(jì)與評(píng)測(cè)、虛擬現(xiàn)實(shí)教育應(yīng)用及教育信息化戰(zhàn)略的研究。E-mail:shenyang@bnu.edu.cn。潘俊君為通訊作者,E-mail:panjunjun@buaa.edu.cn。
一、研究背景及問題
近年來,我國(guó)學(xué)者對(duì)VR技術(shù)在K-12階段、高等教育、職業(yè)教育等不同學(xué)段構(gòu)筑3D情境、交互場(chǎng)景的應(yīng)用研究成果已較為豐富。然而,囿于人體器官的復(fù)雜性、技術(shù)發(fā)展的瓶頸等,我國(guó)在VR智能醫(yī)教系統(tǒng)與醫(yī)學(xué)教育的深度融合與常態(tài)應(yīng)用、醫(yī)學(xué)教育的公平高效、個(gè)性化教學(xué)與個(gè)性化診療等方面還有較大的空間。《教育現(xiàn)代化2035》中也指出要加大應(yīng)用型、復(fù)合型、技術(shù)技能型人才培養(yǎng)比重。可以說,隨著現(xiàn)代醫(yī)學(xué)與新興科技的迅猛發(fā)展,以及人們對(duì)美好生活的向往不斷提高,精準(zhǔn)醫(yī)療和醫(yī)學(xué)人才的需求隨之劇增,傳統(tǒng)的臨床技能教學(xué)模式亟待改革。通過文獻(xiàn)梳理和調(diào)研,我國(guó)當(dāng)前的醫(yī)學(xué)教育,特別是臨床教育領(lǐng)域所面臨的現(xiàn)實(shí)困境主要集中在以下3個(gè)方面:理論與實(shí)踐的脫節(jié);醫(yī)學(xué)實(shí)驗(yàn)教學(xué)資源昂貴、不可重復(fù);精準(zhǔn)醫(yī)療、個(gè)性化診療與醫(yī)學(xué)人才規(guī)模化培養(yǎng)之間的矛盾難以破解。此外,醫(yī)療手術(shù)的精準(zhǔn)化、微創(chuàng)化和個(gè)性化發(fā)展,對(duì)臨床醫(yī)生的手術(shù)技能提出了新要求,更加需要客觀、定量的手術(shù)技能訓(xùn)練支撐。虛擬手術(shù)操作訓(xùn)練的低成本、安全可靠、可重復(fù)性、個(gè)性化病例數(shù)據(jù)動(dòng)態(tài)接入、智能化綜合評(píng)價(jià)等優(yōu)勢(shì),將使其成為破解醫(yī)學(xué)教育困境的一個(gè)新突破口。2008年起,北京航空航天大學(xué)虛擬現(xiàn)實(shí)系統(tǒng)與技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室團(tuán)隊(duì)展開虛擬手術(shù)技術(shù)攻關(guān),目前已成功研發(fā)了我國(guó)自主知識(shí)產(chǎn)權(quán)的VR智能虛擬手術(shù)系統(tǒng)[1]。
力反饋交互是VR系統(tǒng)中的關(guān)鍵技術(shù)之一,其作用是在虛擬漫游的3D空間內(nèi),實(shí)現(xiàn)人機(jī)交互的力觸覺,拓展人類感知。目前國(guó)內(nèi)外的學(xué)者關(guān)于VR在教育中應(yīng)用的研究主要圍繞“情境化教育”“沉浸式學(xué)習(xí)”“學(xué)習(xí)環(huán)境特征分析”等,在宏觀層面展開了相關(guān)理論探討[2-4]。針對(duì)VR情境中力反饋交互對(duì)學(xué)習(xí)影響的研究較少。本研究基于北京航空航天大學(xué)研發(fā)的VR智能醫(yī)教技術(shù)裝備,以腸切除手術(shù)技能習(xí)得為教學(xué)案例,在北京航天總醫(yī)院開展準(zhǔn)實(shí)驗(yàn)研究,深入探究力反饋交互在手術(shù)技能習(xí)得方面的影響,以期為VR智能醫(yī)教突破醫(yī)學(xué)教育困境、促進(jìn)醫(yī)學(xué)教育的公平高效、個(gè)性化教學(xué)與個(gè)性化診療等方面提供借鑒。
二、研究現(xiàn)狀及理論基礎(chǔ)
(一)技能習(xí)得理論
技能是在練習(xí)基礎(chǔ)上形成的按某種規(guī)則或操作程序順利完成某種智力任務(wù)或身體協(xié)調(diào)任務(wù)的能力[5]。隨著科技的進(jìn)步和學(xué)習(xí)方式的改變,研究者逐漸發(fā)現(xiàn)VR作為一種吸引和激勵(lì)學(xué)生、縮短技能習(xí)得的時(shí)間、減少材料使用的方法,對(duì)于提升技能習(xí)得是有效的。近年來,隨著沉浸式虛擬現(xiàn)實(shí)技術(shù)的發(fā)展和虛擬現(xiàn)實(shí)技術(shù)與醫(yī)學(xué)的融合,使其促進(jìn)醫(yī)學(xué)技能的提升成為可能[6]。VR技術(shù)允許學(xué)生在課程學(xué)習(xí)中反復(fù)回到相同的程序或任務(wù)[7],并不斷重復(fù)手術(shù)流程,從而增強(qiáng)訓(xùn)練,減少昂貴的動(dòng)物訓(xùn)練模型的需求。VR力反饋技術(shù)與學(xué)習(xí)將結(jié)合提供一種創(chuàng)新方法來促進(jìn)學(xué)生的學(xué)習(xí)和記憶,并對(duì)技能習(xí)得有所促進(jìn)。 Jung等人開發(fā)的虛擬現(xiàn)實(shí)力反饋技能模擬器[8],幫助醫(yī)學(xué)學(xué)生完成靜脈注射的技能習(xí)得,研究表明基于虛擬現(xiàn)實(shí)和觸覺技能的模擬過程可以有效地改善教育環(huán)境,提供真實(shí)的注射體驗(yàn),并減少因消耗準(zhǔn)備材料而產(chǎn)生的成本。因此,力反饋技術(shù)被引入到教育和學(xué)習(xí)活動(dòng)中,用戶不僅可以通過圖形窗口觀察學(xué)習(xí)環(huán)境,還可以通過觸覺設(shè)備感受學(xué)習(xí)環(huán)境中與對(duì)象交互時(shí)產(chǎn)生的觸覺信息。力反饋的應(yīng)用不僅提供了更真實(shí)、身臨其境的學(xué)習(xí)情境,學(xué)習(xí)與實(shí)踐的結(jié)合也有助于提高技能的掌握效率。
(二)交互式學(xué)習(xí)理論
陳麗提出的交互層次塔模型[9]闡述了遠(yuǎn)程學(xué)習(xí)中三個(gè)層面教學(xué)交互的關(guān)系、抽象性,以及三層面教學(xué)交互發(fā)生的環(huán)境。層次塔以媒體為平臺(tái),塔底層是操作交互;中間層是信息交互;最上層是概念交互,各層面的教學(xué)交互對(duì)學(xué)習(xí)意義不同。借鑒到VR學(xué)習(xí)環(huán)境下的交互式學(xué)習(xí)中來,學(xué)生借助力反饋技術(shù)賦予的力觸覺通道與3D構(gòu)筑的教學(xué)情境產(chǎn)生交互,實(shí)現(xiàn)和真實(shí)操作對(duì)象一樣或近似的操作感,屬于交互層次塔理論中的最底層:操作交互,是其他更高層次交互的基礎(chǔ)所在,其對(duì)概念認(rèn)知和技能習(xí)得的作用機(jī)制,存在重要的研究?jī)r(jià)值。Minogue[10]通過學(xué)生與其設(shè)計(jì)的動(dòng)物細(xì)胞的VR力反饋虛擬力反饋模型的交互,發(fā)現(xiàn)該體驗(yàn)提高了學(xué)生導(dǎo)航和解釋細(xì)胞環(huán)境的能力。實(shí)驗(yàn)結(jié)果表明,力反饋系統(tǒng)的應(yīng)用不僅提供了更真實(shí)、身臨其境的學(xué)習(xí)情境,也有助于提高學(xué)習(xí)與實(shí)踐的結(jié)合。
(三)觸覺反饋技術(shù)研究進(jìn)展
盡管發(fā)展心理學(xué)和認(rèn)知心理學(xué)領(lǐng)域關(guān)于觸覺知覺和認(rèn)知的基本原理和過程有大量且相對(duì)可靠的文獻(xiàn)基礎(chǔ),但關(guān)于觸覺反饋技術(shù)對(duì)教育的影響,人們知之甚少。在醫(yī)學(xué)教育領(lǐng)域,機(jī)器人輔助手術(shù)在手術(shù)室的引入,使手術(shù)取得了顯著的進(jìn)步。因此,在過去的十年里,美國(guó)外科醫(yī)師學(xué)院住院醫(yī)師評(píng)審委員會(huì)就規(guī)定,所有項(xiàng)目都要建立一個(gè)技能實(shí)驗(yàn)室課程。其中腹腔鏡箱訓(xùn)練器和虛擬現(xiàn)實(shí)模擬器是最低可接受的設(shè)備[11]。Botden將傳統(tǒng)的有觸覺反饋的箱式模擬器與無觸覺反饋的虛擬現(xiàn)實(shí)腹腔鏡模擬器進(jìn)行了比較[12]。研究發(fā)現(xiàn),參與者在模擬實(shí)際復(fù)雜的腹腔鏡任務(wù)時(shí)明顯更喜歡觸覺反饋。在復(fù)雜的模式切割任務(wù)中,表現(xiàn)出了更快地完成和更少錯(cuò)誤。研究得出結(jié)論,觸覺反饋在高級(jí)的手術(shù)任務(wù)中具有更高的精確度。觸覺反饋在這些模擬器中的重要性一直是人們感興趣的話題。
綜上,現(xiàn)有的研究成果,主要聚焦VR學(xué)習(xí)環(huán)境下的力反饋交互在促進(jìn)概念認(rèn)知與理解、增強(qiáng)學(xué)習(xí)動(dòng)機(jī)、提升技能習(xí)得效率等方面的作用,在技能習(xí)得的具體影響因素方面缺少深入探究。本研究將從深度感知、雙手協(xié)調(diào)性、手術(shù)效率、組織處理方面研究力反饋交互對(duì)手術(shù)技能習(xí)得的影響。據(jù)我們所知,本文是國(guó)內(nèi)首次開展基于力反饋交互的醫(yī)學(xué)教育準(zhǔn)實(shí)驗(yàn)研究,具有重要的學(xué)術(shù)意義。
三、研究設(shè)計(jì)及實(shí)施
(一)問題的提出與研究假設(shè)
本實(shí)驗(yàn)研究依托我國(guó)自主研制的第一個(gè)貫通自研多維度力覺測(cè)量和反饋裝置,個(gè)性化人體器官幾何、物理、生理建模,復(fù)雜手術(shù)操作過程實(shí)時(shí)交互仿真和手術(shù)訓(xùn)練效果量化評(píng)估的虛擬手術(shù)支撐平臺(tái)(UniVRLap)。該系統(tǒng)首次提出基于力覺測(cè)量的力反饋模擬逼真度評(píng)價(jià)技術(shù),與實(shí)際手術(shù)交互操作過程的真實(shí)力覺測(cè)量數(shù)據(jù)相比,在國(guó)際上首次公開了力反饋誤差5%的精度值。因此提出本實(shí)驗(yàn)的假設(shè):有力反饋交互學(xué)習(xí)比沒有力反饋交互學(xué)習(xí)更能促進(jìn)手術(shù)技能習(xí)得。
(二)研究對(duì)象
本次實(shí)驗(yàn)從北京航天總醫(yī)院招募了43名五年級(jí)醫(yī)學(xué)生,他們均未接觸過或者操作過VR手術(shù)模擬器。我們將被試隨機(jī)分為兩組進(jìn)行實(shí)驗(yàn),有效收取了37人的實(shí)驗(yàn)數(shù)據(jù),兩組學(xué)習(xí)者均可擁有3D教學(xué)情境的可視化體驗(yàn),以及手術(shù)操作中的組織形變、病灶灼燒、血流等視覺、聽覺通道體驗(yàn)。實(shí)驗(yàn)組在使用VR虛擬手術(shù)系統(tǒng)進(jìn)行結(jié)腸切除手術(shù)學(xué)習(xí)和技能訓(xùn)練過程中,力反饋交互是開啟狀態(tài),學(xué)習(xí)者可以實(shí)時(shí)地體驗(yàn)到來自虛擬的組織和器官對(duì)手術(shù)器械操作的力觸覺。對(duì)照組力反饋交互裝置是關(guān)閉狀態(tài)。
(三)研究工具
1. VR智能醫(yī)教系統(tǒng)
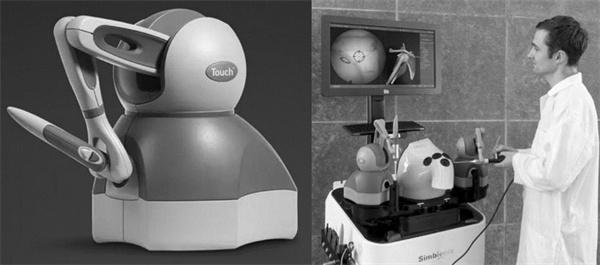
本文中使用的是六自由度(三維空間的平移和旋轉(zhuǎn))的力反饋設(shè)備3D System Touch,如圖1所示,該力反饋設(shè)備被廣泛應(yīng)用于全世界各種虛擬手術(shù)仿真模擬器的力覺渲染當(dāng)中。用戶可以通過操作力反饋設(shè)備手柄來控制虛擬環(huán)境中手術(shù)器械。虛擬環(huán)境中物體的運(yùn)動(dòng)符合物理世界的物理規(guī)律。當(dāng)用戶操作力反饋設(shè)備控制虛擬手術(shù)工具運(yùn)動(dòng)并和虛擬環(huán)境中其他虛擬物體(比如人體組織、骨骼)發(fā)生碰撞時(shí),根據(jù)物理規(guī)律可以計(jì)算出虛擬手術(shù)工具的受力,該受力可以通過力反饋設(shè)備的電機(jī)作用于力反饋設(shè)備手柄的運(yùn)動(dòng),以使得操作者感受到來自虛擬場(chǎng)景中碰撞產(chǎn)生的力。在本實(shí)驗(yàn)室中,每個(gè)力反饋設(shè)備的手柄分別和兩個(gè)手術(shù)器械綁定(左手:電凝器L-hook,右手:手術(shù)抓鉗)。
圖1? ?學(xué)習(xí)者基于VR智能醫(yī)教系統(tǒng)進(jìn)行手術(shù)技能學(xué)習(xí)和訓(xùn)練
圖2? ?左側(cè)是力反饋設(shè)備,右側(cè)是Simbionix公式利用
力反饋設(shè)備進(jìn)行穿刺實(shí)驗(yàn)
在本實(shí)驗(yàn)中,實(shí)驗(yàn)組中的力反饋是由交互力產(chǎn)生的,在對(duì)照組中力反饋產(chǎn)生的力為零,但程序中的手術(shù)器械和組織的碰撞檢測(cè)是同樣的,也就是說,人機(jī)交互的視覺效果依然存在,只是沒有力感。我們要求兩組參與者在訓(xùn)練過程中,盡可能平滑和快速地進(jìn)行操作,如圖2所示。
2. 腹腔鏡手術(shù)訓(xùn)練箱
在此次實(shí)驗(yàn)中,我們的前測(cè)和后測(cè)都在腹腔鏡手術(shù)訓(xùn)練箱中進(jìn)行,這是目前最普遍使用的腹腔鏡手術(shù)訓(xùn)練裝置。我們使用的腹腔鏡手術(shù)訓(xùn)練箱大小為38×27×27厘米,如圖3所示。根據(jù)實(shí)驗(yàn)需要,對(duì)訓(xùn)練箱進(jìn)行了簡(jiǎn)單改造,在訓(xùn)練箱中放置了一個(gè)塑料盒來盛放腸組織。腹腔鏡訓(xùn)練手術(shù)箱和真實(shí)腹腔鏡手術(shù)操作臺(tái)一樣,有左右兩個(gè)孔供放置手術(shù)器械,左手是手術(shù)抓鉗,右手是手術(shù)剪刀(因?yàn)閷?shí)驗(yàn)條件的限制,我們使用手術(shù)剪刀替代電凝器)。腹腔鏡訓(xùn)練手術(shù)箱內(nèi)部上方固定有一個(gè)高清攝像頭,與顯示屏連接。被試可以通過觀看顯示屏上的實(shí)時(shí)3D可視化,引導(dǎo)結(jié)腸切除手術(shù)操作。本次實(shí)驗(yàn)中涉及所有的人體腸均來自醫(yī)學(xué)院捐贈(zèng)。
圖3? ?腹腔鏡手術(shù)訓(xùn)練箱和醫(yī)學(xué)生進(jìn)行腸切除術(shù)
3. GOALS標(biāo)準(zhǔn)
GOALS標(biāo)準(zhǔn)是一個(gè)有效的評(píng)估工具,一套國(guó)際通用的具有結(jié)構(gòu)效度的手術(shù)技能評(píng)估方法。本實(shí)驗(yàn)中用以評(píng)估醫(yī)學(xué)生結(jié)腸切除腹腔鏡手術(shù)技能習(xí)得的學(xué)習(xí)績(jī)效。GOALS標(biāo)準(zhǔn)的每個(gè)維度都使用1~5分李克特量表進(jìn)行打分。表1給出了GOALS評(píng)分標(biāo)準(zhǔn)及對(duì)應(yīng)的分?jǐn)?shù)釋義。五位外科手術(shù)專家根據(jù)視頻錄像進(jìn)行打分,取均值。(本表僅給出1分及5分的評(píng)價(jià)標(biāo)準(zhǔn),2分、3分、4分分別根據(jù)該維度的績(jī)效表現(xiàn),對(duì)應(yīng)尚可、中等、接近完美)
4. 準(zhǔn)實(shí)驗(yàn)設(shè)計(jì)和實(shí)施
本實(shí)驗(yàn)包含三個(gè)主要步驟,流程如圖4所示。
圖4? ?實(shí)驗(yàn)流程圖
四、數(shù)據(jù)分析與討論
(一)數(shù)據(jù)分析
表2? ? ? ? ?前后測(cè)t-檢驗(yàn)(雙樣本等方差假設(shè))
本文使用SPSS19軟件包對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行統(tǒng)計(jì)分析。我們將每個(gè)參與者在GOALS標(biāo)準(zhǔn)的四個(gè)維度成績(jī)相加得出總成績(jī)?nèi)缓筮M(jìn)行處理,對(duì)實(shí)驗(yàn)組和對(duì)照組學(xué)生進(jìn)行結(jié)腸切除手術(shù)前測(cè)成績(jī)與后測(cè)成績(jī)進(jìn)行雙樣本等方差假設(shè)的t-檢測(cè),結(jié)果見表2。
為了檢驗(yàn)基于VR的腹腔鏡模擬器是否可以提高醫(yī)學(xué)生的手術(shù)技能習(xí)得,我們利用所有參與者的前后測(cè)成績(jī)進(jìn)行配對(duì)樣本T檢測(cè)。我們發(fā)現(xiàn)經(jīng)過VR腹腔鏡模擬器的訓(xùn)練兩組參與者的GOALS得分都有了顯著的提高,結(jié)果見表3。
表3? ? ? ? ? ? ? t-檢驗(yàn)(配對(duì)雙樣本均值分析)
但上面的結(jié)果并沒有給出力反饋對(duì)醫(yī)學(xué)生手術(shù)技能哪些具體的方面更加有提升效果。因此,為了探究力反饋交互對(duì)手術(shù)技能習(xí)得具體維度的影響,我們使用混合協(xié)方差分析(Mixed ANCOVA)方法對(duì)數(shù)據(jù)進(jìn)行了處理。前測(cè)和后測(cè)的成績(jī)分別設(shè)置為協(xié)變量和因變量,組號(hào)作為自變量。統(tǒng)計(jì)結(jié)果見表4。
評(píng)估了醫(yī)生對(duì)三維空間的定位感知能力。精確的深度感知能力可以幫助醫(yī)生區(qū)分腹腔鏡手術(shù)空間中組織的相對(duì)位置,從而可以快速精準(zhǔn)地定位病灶。從表4中可知,實(shí)驗(yàn)組(有力反饋交互)的分?jǐn)?shù)顯著高于對(duì)照組(無力反饋)(F=5.266,p<0.05,η2=1.314)。
從效率的角度來看兩組的統(tǒng)計(jì)數(shù)據(jù),我們發(fā)現(xiàn)對(duì)照組和實(shí)驗(yàn)組并沒有顯著的區(qū)別(F=2.605,p>0.1,η2=0.071)。
對(duì)照組參與者的雙手靈活性比實(shí)驗(yàn)組參與者的雙手靈活性分?jǐn)?shù)較高(F=3.641,p<0.1,η2=0.097)。
由表5可以看出對(duì)照組參與者能夠比實(shí)驗(yàn)組參與者更熟練地處理結(jié)腸組織(F=4.895,p<0.05,η2=0.126)。
(二)數(shù)據(jù)討論
因?yàn)樗膫€(gè)維度的總成績(jī)可以綜合地表現(xiàn)一個(gè)人的手術(shù)技能,具體結(jié)果見表4。從表中可知兩組在不同維度的前測(cè)技能習(xí)得成績(jī)上沒有顯著差異(p>0.1)。這表明對(duì)照組和實(shí)驗(yàn)組作為研究對(duì)象較為合理。
同時(shí),兩組在部分維度的后測(cè)數(shù)據(jù)存在顯著性統(tǒng)計(jì)差異(p<0.01),以力反饋為自變量進(jìn)行基于VR的腹腔鏡模擬器訓(xùn)練對(duì)兩組參與者的手術(shù)技能產(chǎn)生了不同的影響。而且,使用了力反饋的實(shí)驗(yàn)組比沒有使用力反饋的對(duì)照組成績(jī)更高,這也表明力反饋確實(shí)可以提高醫(yī)學(xué)生手術(shù)技能的獲取。
1. 深度感知
在真實(shí)的腹腔鏡手術(shù)當(dāng)中,醫(yī)生需要通過將微型攝像頭放置到病灶位置,然后醫(yī)生通過二維的顯示屏幕來進(jìn)行手術(shù)操作。但二維的圖像相對(duì)三維空間缺少一個(gè)維度:深度,這樣會(huì)導(dǎo)致人們將物體的大小和深度混淆,所以感知深度是人們?nèi)粘I钪凶罹咛魬?zhàn)性的感知任務(wù)之一。Ho等人也通過實(shí)驗(yàn)表明,觸覺訓(xùn)練可以用來修正視覺上錯(cuò)誤的感知[13]。表4中數(shù)據(jù)表明,實(shí)驗(yàn)組所增加的“手術(shù)操作的”交互手感,可以通過力反饋交互和3D視覺變化來更精確地感知手術(shù)空間的定位深度,可以顯著提高醫(yī)學(xué)生手術(shù)技能中的深度感知能力。
2. 手術(shù)效率
通過在結(jié)腸切割手術(shù)過程中的觀察,我們發(fā)現(xiàn)人體結(jié)腸的解剖結(jié)構(gòu)存在具有巨大的個(gè)體差異:不同人的腸體之間在半徑、長(zhǎng)度、厚度及脂肪等附著物等方面都有很大的差別。在實(shí)際的切割操作過程中,不同的參與者也可能會(huì)選擇結(jié)腸不同的位置進(jìn)行切割。這就導(dǎo)致不同的參與者測(cè)試過程中所進(jìn)行的工作量存在較大差異。鑒于人體器官個(gè)性化差異較大,而VR智能醫(yī)教系統(tǒng)中的虛擬人體器官是統(tǒng)一化的數(shù)字模型,加上影響手術(shù)效率的主觀因素也較為多元,導(dǎo)致兩組在訓(xùn)練前后的手術(shù)效率差異并不顯著。
3. 雙手協(xié)調(diào)性
雙手協(xié)調(diào),就像我們的其他認(rèn)知技能一樣,可以被訓(xùn)練和提高。Pernalete等人在腦卒中后患者的病后恢復(fù)中發(fā)現(xiàn)觸覺可以用來提高病人的雙手協(xié)調(diào)性[14]。由表4數(shù)據(jù)可知,此次實(shí)驗(yàn)中兩組分?jǐn)?shù)之間沒有顯著的區(qū)別。原因可能在于:實(shí)際的腹腔鏡手術(shù)中和虛擬手術(shù)訓(xùn)練過程中,手術(shù)器械可視化的移動(dòng)方向和參與者手部的移動(dòng)方向均相反。對(duì)于新手醫(yī)生來說,短時(shí)間內(nèi)(本次實(shí)驗(yàn)為4周)很難熟練掌握手術(shù)器械的操作技巧。為了提高參與者操作手術(shù)器械的熟練程度,可能需要更長(zhǎng)的訓(xùn)練時(shí)間。
4. 組織處理
表4表明帶有力反饋交互能夠顯著提高參與者在實(shí)際腹腔鏡手術(shù)當(dāng)中處理人體組織的能力。醫(yī)學(xué)生通過力觸覺通道(操作桿、手術(shù)鉗子等)控制虛擬空間中的手術(shù)器械與虛擬人體器官所構(gòu)筑的手術(shù)場(chǎng)景產(chǎn)生交互,實(shí)現(xiàn)和實(shí)際手術(shù)操作一樣的推、捏、切、割、燒、縫等復(fù)雜手術(shù)操作手感。而這種“手感”往往將成為外科醫(yī)生經(jīng)歷多年實(shí)操手術(shù)之后,獲得的一種寶貴的經(jīng)驗(yàn)性的“知能”。Hagelsteen[15]和我們得出了同樣的結(jié)論:具有力反饋的VR腹腔鏡模擬器比沒有力反饋的VR腹腔鏡模擬器更能提高被試的組織處理能力。醫(yī)生組織處理能力的提高可以減少病人的手術(shù)風(fēng)險(xiǎn),比如減少醫(yī)生對(duì)重要部位的誤操作導(dǎo)致手術(shù)失敗等。
(三)訪談分析
研究者采用“無結(jié)構(gòu)型訪談”和“半結(jié)構(gòu)型訪談”對(duì)臨床手術(shù)醫(yī)生、手術(shù)技能培訓(xùn)中心教師、醫(yī)學(xué)生三類人群(39位)進(jìn)行訪談。在確定編碼類目時(shí),使用“共識(shí)性質(zhì)性研究方法”(Consensual Qualitative Research)。統(tǒng)計(jì)編碼類目被討論的頻次高于被訪談人數(shù)50%以上的類目,記錄最終的認(rèn)可度百分比結(jié)果,見表5。總體上,初學(xué)者和有經(jīng)驗(yàn)的學(xué)習(xí)者對(duì)VR智能醫(yī)教的不同方面,認(rèn)可度評(píng)價(jià)有所側(cè)重。
一方面,對(duì)于缺乏真實(shí)手術(shù)經(jīng)驗(yàn)的初學(xué)者,VR場(chǎng)景構(gòu)建和流程演練在增進(jìn)自我效能感、降低認(rèn)知負(fù)荷方面、提高心流體驗(yàn)方面,認(rèn)可度較高。醫(yī)學(xué)生在基于VR的腹腔鏡模擬器上進(jìn)行訓(xùn)練不僅可以促進(jìn)手術(shù)技能的習(xí)得,而且可以提高醫(yī)學(xué)生程序性知識(shí)學(xué)習(xí)的心流體驗(yàn)。學(xué)習(xí)者可以在這樣的環(huán)境中從多個(gè)渠道獲取多元的信息,從而保持學(xué)習(xí)的愉悅感、專注度、控制感、沉浸感等[16]。此外,初學(xué)者希望得到更多有經(jīng)驗(yàn)醫(yī)生或教師的線上、線下指導(dǎo)。
另一方面,有經(jīng)驗(yàn)的學(xué)習(xí)者(臨床醫(yī)生、技能培訓(xùn)中心教師),對(duì)教學(xué)場(chǎng)景模擬、力反饋精準(zhǔn)度、教學(xué)內(nèi)容設(shè)置方面給予了高度肯定,同時(shí),在個(gè)性化教學(xué)資源開發(fā)、教學(xué)策略、學(xué)習(xí)活動(dòng)進(jìn)階設(shè)計(jì)和教學(xué)評(píng)價(jià)方面的不足,提出了寶貴的建議和意見,旨在通過技術(shù)與教學(xué)過程的深度融合,促進(jìn)知識(shí)遷移、技能習(xí)得等。
五、對(duì)VR智能醫(yī)教系統(tǒng)應(yīng)用發(fā)展的啟示
第一,帶有力反饋的手術(shù)模擬器可以通過力覺交互和3D視覺變化來更精確地感知手術(shù)空間的定位深度,從而提升醫(yī)學(xué)生的深度感知能力。醫(yī)學(xué)生通過力觸覺通道(操作桿、手術(shù)鉗子等)控制虛擬空間中的手術(shù)器械與虛擬人體器官所構(gòu)筑的手術(shù)場(chǎng)景產(chǎn)生交互,感受和實(shí)際手術(shù)操作一樣的推、捏、切、割、燒、縫等復(fù)雜手術(shù)操作的手感,從而提升醫(yī)生的組織處理能力以減少病人的手術(shù)風(fēng)險(xiǎn)。因此,本實(shí)驗(yàn)基于VR腹腔鏡模擬器的實(shí)驗(yàn),通過實(shí)驗(yàn)組和對(duì)照組使用力反饋訓(xùn)練器的對(duì)比得出力反饋交互可以顯著提高醫(yī)學(xué)生手術(shù)技能中深度感知、手術(shù)效率和組織處理方面的技能。
第二,鑒于本實(shí)驗(yàn)在維度2手術(shù)效率方面的數(shù)據(jù)分析,建議加強(qiáng)個(gè)性化人體器官場(chǎng)景開發(fā),可按照病人的體重、年齡、性別等劃分,供學(xué)習(xí)者選擇面向不同人群的手術(shù)訓(xùn)練模塊,提升教學(xué)資源的適切性。鑒于本實(shí)驗(yàn)維度3雙手協(xié)調(diào)性方面的數(shù)據(jù)分析,可通過游戲化學(xué)習(xí),支持小組協(xié)作與競(jìng)技,通過社群化學(xué)習(xí),增強(qiáng)學(xué)習(xí)者對(duì)教學(xué)系統(tǒng)的粘性,從而在較好的學(xué)習(xí)體驗(yàn)中,增強(qiáng)訓(xùn)練時(shí)長(zhǎng),促進(jìn)雙手協(xié)調(diào)性。游戲化學(xué)習(xí)對(duì)學(xué)生學(xué)習(xí)效果具有較大程度且積極的影響,不受知識(shí)類型、學(xué)段等條件變量的影響[17]。游戲競(jìng)技也是小組協(xié)作學(xué)習(xí)、社群化學(xué)習(xí)的一種有效形式。鑒于本實(shí)驗(yàn)維度4組織處理方面的數(shù)據(jù)分析,可通過構(gòu)建不同的虛擬操作交互場(chǎng)景以增強(qiáng)學(xué)習(xí)者手術(shù)操作手感和熟練度、應(yīng)對(duì)突發(fā)狀況的寶貴經(jīng)驗(yàn)。同時(shí)也可以通過增加觸覺通道如多種操作桿、手術(shù)鉗子等,以增強(qiáng)學(xué)習(xí)者的體驗(yàn)感,提升其學(xué)習(xí)動(dòng)機(jī)與學(xué)習(xí)興趣。
第三,基于訪談和文獻(xiàn),力反饋交互營(yíng)造了高度擬真的效果,使得學(xué)習(xí)者獲得一定的心流體驗(yàn)。本研究所采用的VR智能醫(yī)教系統(tǒng)相比于傳統(tǒng)教學(xué)方式具有自動(dòng)反饋的功能,包括力反饋、運(yùn)動(dòng)數(shù)據(jù)反饋、執(zhí)行效果反饋等,但這些反饋僅以抽象的數(shù)字形式表達(dá),尚不能提供人性化的操作建議。目前我國(guó)自主開發(fā)的VR智能醫(yī)教系統(tǒng)主要解決的是個(gè)體知識(shí)建構(gòu)和技能習(xí)得。隨著個(gè)性化教學(xué)資源的不斷豐富,在VR醫(yī)教系統(tǒng)設(shè)計(jì)中,可置入知識(shí)和技能在同伴之間共同創(chuàng)造和分享,通過在教學(xué)腳本設(shè)置中增設(shè)角色扮演、提升力反饋精度增強(qiáng)交互、關(guān)注多通道和多模態(tài)認(rèn)知載荷等,以增強(qiáng)學(xué)習(xí)者的“情感”(心流)、并建立人機(jī)協(xié)同的反饋機(jī)制,將抽象的數(shù)字表達(dá)轉(zhuǎn)換為形象的智能化反饋,推進(jìn)知識(shí)與技能進(jìn)入集體建構(gòu)階段,形成在學(xué)習(xí)者社群中的貢獻(xiàn)和傳遞的“環(huán)流”,從而促進(jìn)協(xié)同知識(shí)建構(gòu)和群體技能習(xí)得等。
[參考文獻(xiàn)]
[1] PAN J, ZHANG L, YU P, et al. Real-time VR simulation of laparoscopic cholecystectomy based on Parallel Position-based dynamics in GPU[C]// 2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR).? Atlanta,Mar. 22-26, 2020.
[2] 劉德建,劉曉琳,張琰,陸奧帆,黃榮懷.虛擬現(xiàn)實(shí)技術(shù)教育應(yīng)用的潛力、進(jìn)展與挑戰(zhàn)[J].開放教育研究,2016,22(4):25-31.
[3] 黃奕宇. 虛擬現(xiàn)實(shí)(VR)教育應(yīng)用研究綜述[J]. 中國(guó)教育信息化,2018(1):11-16.
[4] 蔡蘇, 王沛文, 楊陽,等. 增強(qiáng)現(xiàn)實(shí)(AR)技術(shù)的教育應(yīng)用綜述[J]. 遠(yuǎn)程教育雜志, 2016, 34(5):27-40.
[5] 曹蕻, 石運(yùn)章. 國(guó)外技能習(xí)得理論研究述評(píng)[J]. 北京城市學(xué)院學(xué)報(bào), 2010(6):62-67.
[6] LOHRE R,? BOIS A J,? ATHWAL G S, et al. Improved complex skill acquisition by immersive virtual reality training: a randomized controlled trial[J]. The journal of bone and joint surgery, 2020, 102(6):1.
[7] OTA D,? LOFTIN B,? SAITO T, et al. Virtual reality in surgical education[J]. Computers in biology & medicine,1995,25(2):127-137.
[8] JUNG E Y,? DONG K P,? LEE Y H, et al. Evaluation of practical exercises using an intravenous simulator incorporating virtual reality and haptics device technologies[J]. Nurse educ today, 2011, 32(4):458-463.
[9] 陳麗. 遠(yuǎn)程學(xué)習(xí)的教學(xué)交互模型和教學(xué)交互層次塔[J]. 中國(guó)遠(yuǎn)程教育, 2004(3):24-28.
[10] MINOGUE J, JONES M G, BROADWELL B. The impact of haptic augmentation on middle school students' conceptions of the animal cell[J]. Virtual reality, 2006, 10(3): 293-305.
[11] PANAIT L,? AKKARY E,? BELL R L, et al. The role of haptic feedback in laparoscopic simulation training[J]. Journal of surgical research, 2009, 156(2):312-316.
[12] BOTDEN S,? TORAB F,? BUZINK S N, et al. The importance of haptic feedback in laparoscopic suturing training and the additive value of virtual reality simulation[J]. Surgical endoscopy, 2007, 22(5):1214-1222.
[13]? YUN-XIAN H,? SASCHA S,? JULIA T, et al. The role of visuohaptic experience in visually perceived depth[J]. Journal of neurophysiology, 2009, 101(6):2789-2801.
[14] PERNALETE N,? RAHEJA A,? KNAACK A. Eye-hand coordination assessment method using a haptic virtual environment with a complex valued neural networks training algorithm.[J]. ACM, 2015:1-4.
[15] HAGELSTEEN K, JOHANSSON R, EKELUND M. Performance and perception of haptic feedback in a laparoscopic 3D virtual reality simulator[J]. Minimally invasive therapy & allied technologies, 2019, 28(5): 309-316.
[16] 李欣,沈夏林,黃曉,王勛. 沉浸式VR可視化空間線索促進(jìn)程序性知識(shí)學(xué)習(xí)的實(shí)證研究[J]. 電化教育研究,2019,40(12):64-71.
[17] 李玉斌,宋金玉,姚巧紅.游戲化學(xué)習(xí)方式對(duì)學(xué)生學(xué)習(xí)效果的影響研究——基于35項(xiàng)實(shí)驗(yàn)和準(zhǔn)實(shí)驗(yàn)研究的元分析[J].電化教育研究,2019,40(11):56-62.
