基于局部的雙目測距算法研究
2021-09-14 23:47:23李佳桑海峰
電腦知識與技術 2021年22期
李佳 桑海峰


摘要:當今在眾多測距方法中,雙目測距因為其無接觸式的測距方法脫穎而出,其測量準確且誤差小,更多應用在實際場景中,本文采用了基于局部的雙目測距方法,首先對圖像進行預處理,針對現實環境天氣陰暗導致的圖像質量不好圖像細節模糊等問題,對被檢測到的目標物體進行邊緣的細節增強處理,減少誤差,去除一些干擾,為后續匹配階段提供了優勢。在匹配階段采用BM匹配算法,基于局部SAD窗口對左右相機圖像依次進行匹配,實驗結果表明,該方法可以減少誤差去除誤匹配,具有一定的準確性。
關鍵詞:雙目測距;圖像預處理;細節增強;立體校正;BM匹配
隨著經濟社會的發展,雙目立體視覺系統受到了越來越多的關注,因為其無接觸和其簡單方便的特點,使其在包括交通,軍事,無人機等工業和科學制造等方向有著不可或缺的地位[1]。倪煒基針對需要實時對立體匹配時間要求很高的問題,提出了分割圖像并且自適應的處理圖像方法。降低了匹配時間[2]。張穎江等人在針對有陰影的圖片上,采用粒子群方法去除誤差,獲得最好的圖片。提高了測距精度,使測量結果更加準確[3]。西安工業大的史珂路提出了多種動態模板匹配方法,為立體匹配提供了更多的可能性[4]。綜合上述問題,本文采用在預處理階段對圖片進行細節增強,去除一些噪聲,經過相機標定立體校正等步驟,最后經過立體匹配左右相機圖像點,得出距離。
1 細節增強圖像預處理
由于拍攝環境亮度低或者相機生產等原因,有時拍攝到的圖片質量很差,會出現跟拍攝物體無關的干擾,本文需要對圖片進行圖像處理,對拍攝的圖像進行邊緣細節增強,改善圖像邊緣模糊,為后續匹配奠定好的基礎[5-6]。首先在基于LAB空間模型下利用分離雙邊濾波器將光照分量提取出來,利用Retinex理論對光照中的干擾進行校正使亮度合適,首先對圖像進行膨脹處理,去除大塊誤差點,之后采用腐蝕處理去除圖像的噪聲,銳化圖像物體邊緣,去除干擾,最后得到符合圖像測距的圖像,為后續測距做了很好的鋪墊。矯正函數如下[Icorrect](x,y)=S[(x,y)β(x,y)],其中[β](x,y)是校正系數,是基于圖像質量選擇的系數公式[β](x,y)=[(Sx,y+a)1+a]和[a=1-2*Smean(x,y)Smaxx,y+Sminx,y+1]這兩個公式,選取最終校正的大小,[Smaxx,y和Sminx,y]分別是像素圖像的最大值和最小值,在求取到平均值[Smean(x,y])之后,我們就可以得到a的大小,帶到公式后,就可以進行圖像的矯正。其效果圖如圖1所示。
2 雙目立體視覺架構設計
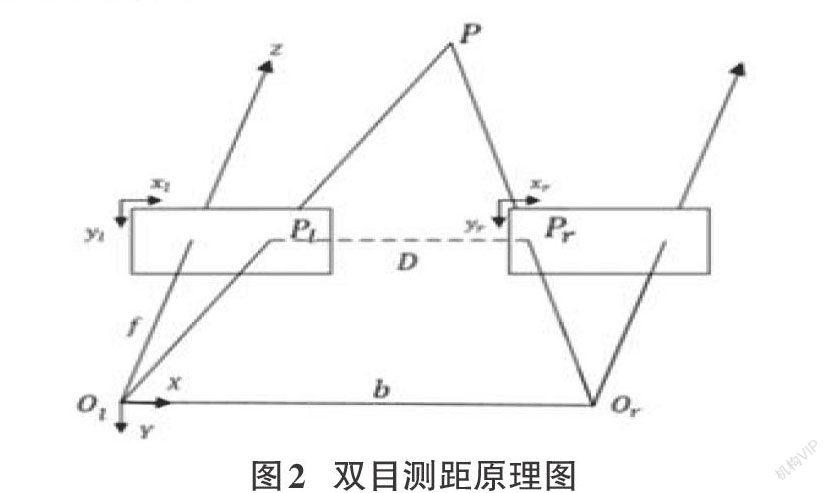
雙目立體視覺測距系統是依據三角形相似原理,模擬人的眼睛成像原理,得出被測物體與相機之間的距離[7]。其測量原理圖如圖2所示:
如圖2 所示,可以看到,左右相機中心和p點構成了一個三角形,根據三角形相似原理,設p點的坐標為(x,y,z),[xl]=f[XcZc]和[xr]=f[(Xc-b)Zc],其中,我們將[xl]-[xr]叫作兩個點的視差,另D=[xl]-[xr],故可求出相機坐標系下空間坐標點P點位置為:[Zc]=[bfD]。由此我們知道,只要知道相機的基線和焦距,然后通過尋找像平面上的視差點就可以得到距離。
3 立體校正
從雙目測距原理我們知道,只要找到左右像平面視差點就可以得到距離,所以我們在相機匹配階段找到視差點就可以完成測距。我們擺放安置攝像機時基本按照相機水平且在同一水平高度上,但是正常情況下相機像平面不可能在同一水平面上,所以需要利用方法進行立體校正,來保證相機像平面水平以及保障世界坐標同一點在左右像平面在同一行上,便于后續立體匹配,減少誤匹配點[8-10]。本文采用bought算法進行相機平面的左右校正,輸入相機之前標定的內外參數,進行行對準,通過校正使原來沒有對齊的左右圖像對齊,進行行校準。實驗效果明顯如圖3,圖4所示。
4 立體匹配
在經過立體校正之后,左右圖像都已經行校準即尋找的視差點都已經約束在一條直線上,為后續匹配已經創造了條件,雙目立體匹配是雙目視覺系統的重要環節,可以這樣說,匹配效果的好壞直接影響整個測距過程,立體匹配是尋找空間中的一點在左右像平面的對應的像素點的過程[11-13]。立體匹配方法有很多,根據匹配窗口大小及匹配策略可以分為局部匹配算法,半全局匹配策略和基于全局匹配算法。其中這些算法各有優缺點,基于全局匹配算法顧名思義,其是在整個深度值下根據約束條件搜索進行匹配,精度很高,但是耗費時間很長,一般不能應用于實際環境,無法達到實時,基于局部匹配方法是根據匹配的特征進行固定窗口的相似度比較,其匹配精度雖然沒有全局匹配策略好,但是其匹配速度比較快,花費時間少,更多應用于實際工業環境中,半全局匹配采納了局部匹配的優勢,在局部和全局之間做出了綜合。但是其缺點也很明顯,在匹配階段有時可能存在較大的“誤匹配塊”,綜合上述并且結合實際情況,在算法和準確率之間做了權衡選擇,采取基于局部的BM匹配算法,進行圖像匹配。其具體算法步驟如下:
1)首先濾波對圖像進行處理,去除干擾,使亮度合適,并增強其物體特征強度。
2)改變SAD窗口大小,使其適應圖像,沿著校正好的同一行坐標進行查找視差點。
3)假如產生“錯誤”匹配,設置濾波器用以消除。
首先在左右圖像上進行預過濾處理,用以去除一些噪聲和擾亂點,為后續匹配做鋪墊,并且增強其物體紋理,加強圖像中的物體的邊緣細節,對于左圖像中的每一個特征,我們在右圖像中尋找特征最大相似的像素點作為一對視差對,經過前面的校正之后,世界坐標點在左右相機成像平面的匹配點都在一條約束極線上,我們只要沿著極線尋找即可。如果右圖像上的匹配點本身具有足夠的特征能夠被檢測到,并且沒有其他的干擾對其進行遮擋,能夠正確匹配,左右視差點就可以被找到。然后沿著水平極線進行左右圖像查找視差點,設置窗口大小,通常采用3[×3,5×5窗口大小進行]尋找,先計算出右像素點周圍的像素平均值,然后與左圖像待匹配點進行比較,最終獲得最優像素點,最后再進行濾波消除可能錯誤的匹配圖像對,獲得最優匹配點。
