基于凸輪機構的熱能驅動車結構創新設計*
2021-09-15 05:42:08周千宇劉洪春胡昊君
機械研究與應用 2021年4期
關鍵詞:設計
周千宇,劉洪春,胡昊君
(武漢科技大學 汽車與交通工程學院,湖北 武漢 430081)
0 引 言
熱能驅動車避障賽是第七屆全國大學生工程訓練綜合能力競賽的賽項之一,旨在通過設計、制造、裝配、調試和最終的比賽等過程,培養學生分析問題、解決問題的能力,提升將理論與實踐相結合的創新意識,同時對大學生提高競技意識也有深遠的影響[1]。
該賽項是此屆比賽新開展的賽項,按照競賽要求,自主設計并制作一臺具有方向控制功能的自行走熱能驅動車,小車完成所有動作所用能量均由液態乙醇(濃度95%)燃燒產生的熱能轉換而得。為此,本文針對熱能驅動車的轉向機構,提出一種盤形凸輪機構控制轉向的小車創新設計方案,通過Matlab進行軌跡分析并設計凸輪輪廓,利用SolidWorks進行三維建模,最后通過制造的實物實驗驗證了設計的合理性,文中所體現的創新設計和創新思維對此類競賽具有一定的指導意義。
1 熱能驅動車總體設計
1.1 小車機構設計
熱能驅動車的結構較為簡單,通過組合式設計可方便拆裝、調整及更換零部件。其結構根據功能一般可劃分為車架、原動機構、傳動機構、行走機構、轉向機構、微調機構[2-3],各機構的組成如表1所列。
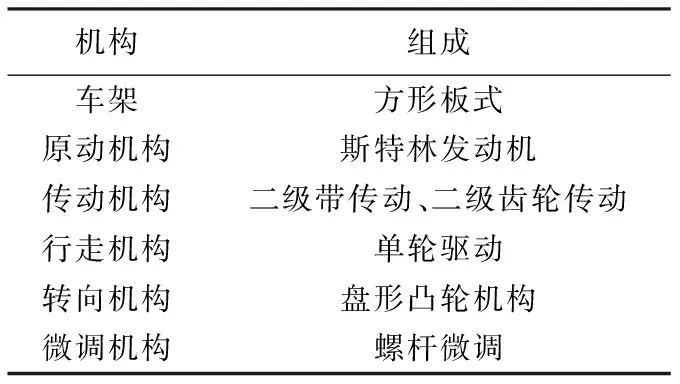
表1 小車結構組成
1.2 小車運動原理分析
根據各機構設計,在SolidWorks中建立小車三維模型,如圖1所示。比賽小車需完成熱能到機械能的轉換、驅動自身行走、自動避開障礙樁等要求。
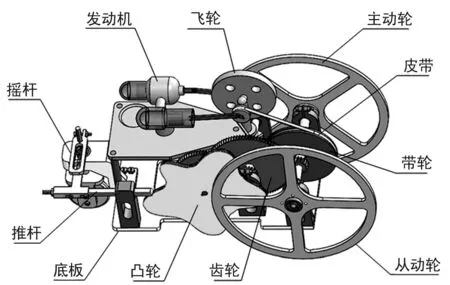
圖1 小車三維模型
小車運動的原理為:點燃酒精燈,撥動發動機的飛輪啟動發動機,發動機將酒精的熱能轉化為飛輪的動能,通過帶傳動將動能傳遞到驅動輪輪軸上,使驅動輪轉動,小車向前運動。同時經驅動輪輪軸與凸輪軸之間的齒輪傳動,使凸輪轉動,凸輪從動件推桿沿水平方向往復運動。推桿移動使固定在前輪支架上的搖桿運動,從而使前輪轉動,實現小車轉向。小車在前進的同時,通過凸輪轉向機構調整前輪角度使小車轉向,在設計準確的凸輪形狀后,可實現小車按軌跡轉向避開障礙物。
2 熱能驅動車創新設計
2.1 小車運動軌跡設計
驅動車場地為5 200 mm×2 200 mm長方形平面區域,如圖2所示,驅動車須在賽場內運行。在賽道上放置有障礙樁以及固定隔板,障礙樁為直徑20 mm、高200 mm的圓棒,固定隔板長1 000 mm。
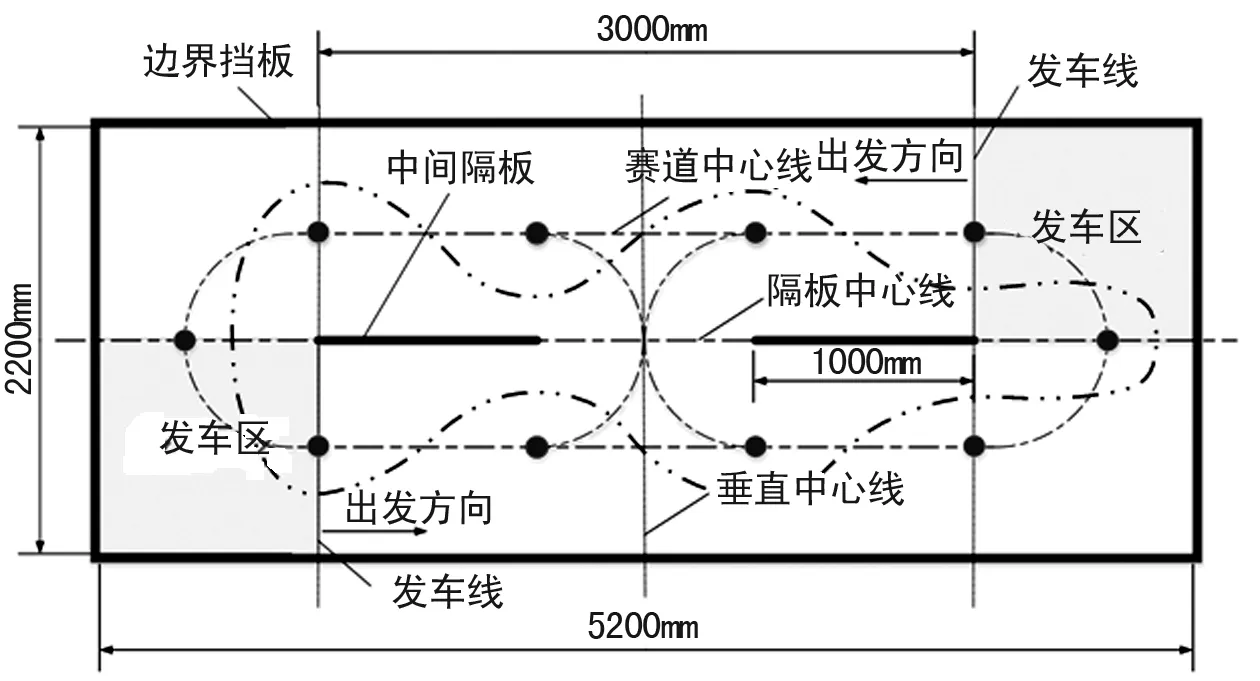
圖2 初賽驅動車賽道示意圖及預設軌跡
小車結構如圖3所示,相關參數如表2所列。
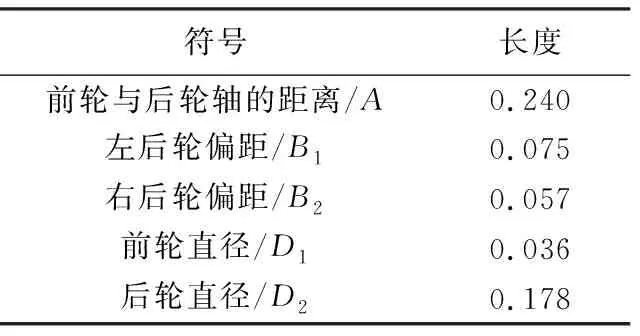
表2 小車相關參數 /m
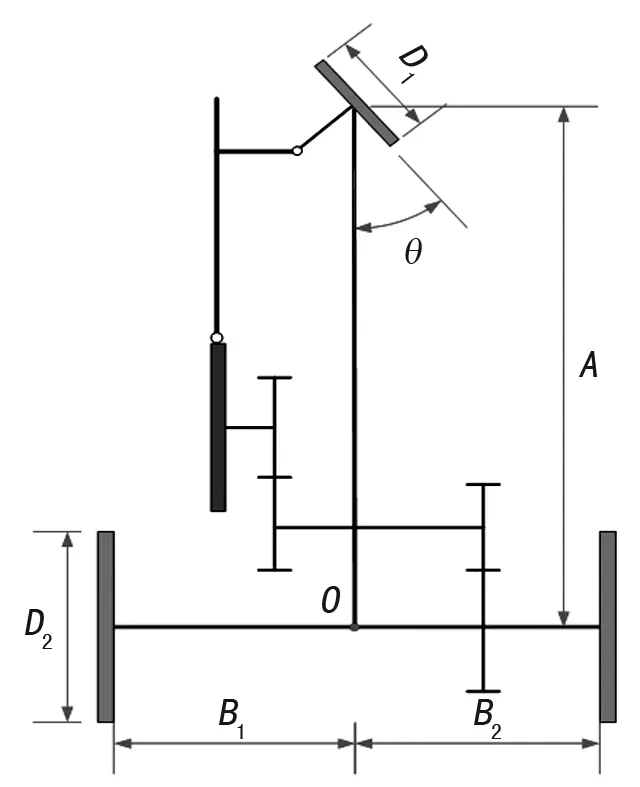
圖3 小車結構簡圖
現場初賽時,兩固定隔板缺口處放置活動隔板,小車需繞樁走出環形“S”軌跡,如圖2中虛線所示,前輪轉向為:左轉-右轉-左轉-右轉-左轉-右轉-左轉-右轉-左轉。
通過設計小車前輪轉向角的變化曲線來設計小車行走軌跡,小車軌跡為對稱圖形,只需要設計半個軌跡即可。小車走圓弧軌跡時設置小車前輪轉角為常數,為保證前輪轉角變化連續,不發生突變,小車左轉到右轉的角度變化為三角函數。通過在Matlab軟件中調試,得到環形“S”軌跡對應的前輪轉向角函數圖如圖4所示。
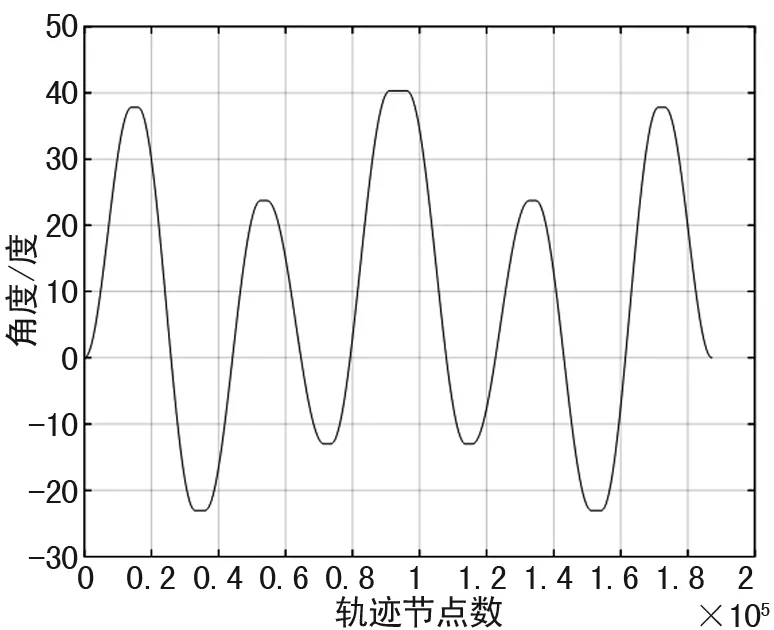
圖4 前輪轉向角函數圖
以場地中點為坐標原點建立坐標系,小車發車位置在圖2左下發車區,起始坐標為O(-1.8,0),前輪轉角為0°。如圖5為小車行走過程中的一般位置,對小車軌跡進行微元處理,將小車行走一圈的軌跡均等分成足夠多的M段,每一段軌跡的兩節點間距離對應主動輪走過的距離為dx,軌跡仿真中取M=187 200,dx=0.000 06 m。
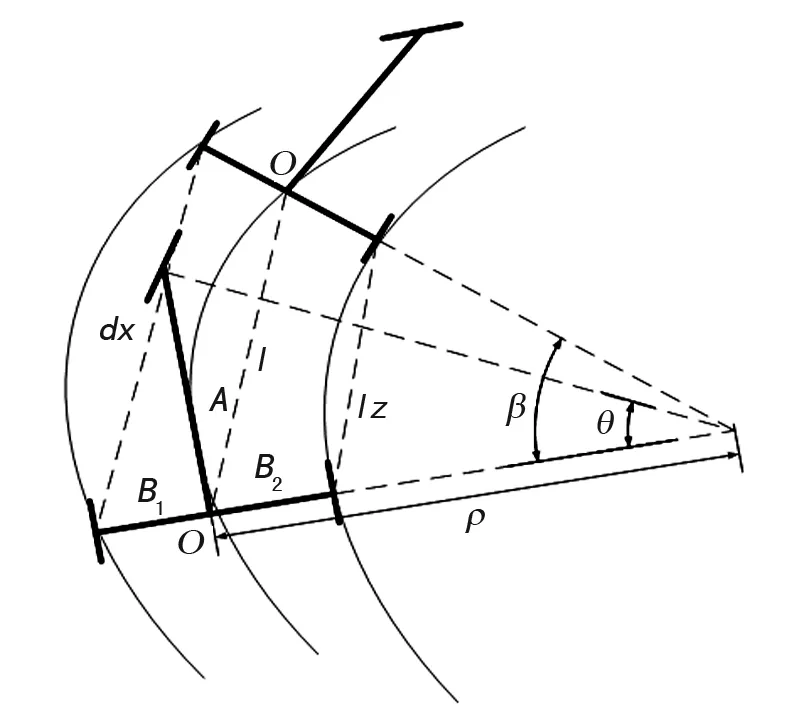
圖5 小車行走示意圖
圖中小車O點軌跡的曲率半徑為ρ,通圖中的幾何關系可知O點軌跡曲率:
P=tanθ/A
(1)
O點經過的距離:
l=dx/(1+P·B1)
(2)
左輪前進距離:
lz={dx·(1-P·B2)}/(1+P·B1)
(3)
右輪前進距離:
ly=dx
(4)
前輪前進距離:
lq=l/cosθ
(5)
后輪中心圓心角的變化角度:
β=l·p
(6)
后輪中點O的坐標:
x=x-l·cosβ,y=y-l·sinβ
(7)
左輪坐標:
xz=xz-lz·cosβ,yz=yz-lz·sinβ
(8)
右輪坐標:
xy=xy-ly·cosβ,yy=yy-ly·sinβ
(9)
前輪坐標:
xq=xq-lq·cos(β+θ)
yq=yq-lq·sin(β+θ)
(10)
通過上述關系式能推算出軌跡中下一點的坐標,通過不斷地迭代可推算得出各個輪子的行走軌跡,在Matlab中帶入相關參數,對各輪子的離散坐標點進行曲線擬合,得到小車各個輪子的軌跡,如圖6所示。
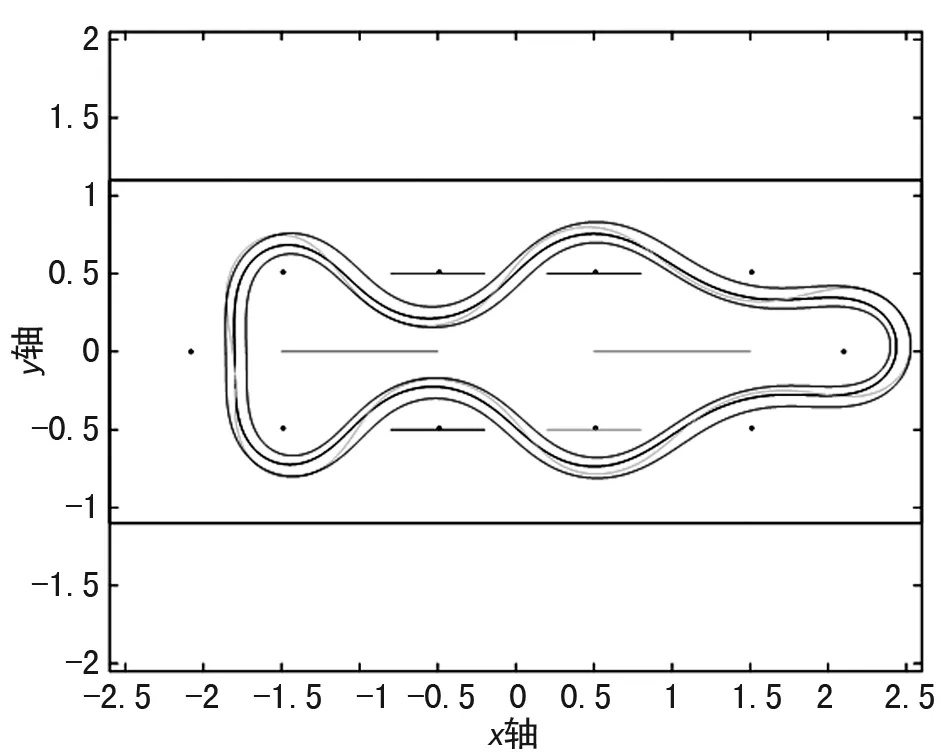
圖6 初賽小車軌跡
2.2 小車關鍵機構設計
(1) 原動機構 小車原動機構的作用是將乙醇燃燒產生熱能轉換成機械能,原動機構采用α型斯特林發動機,如圖7所示。
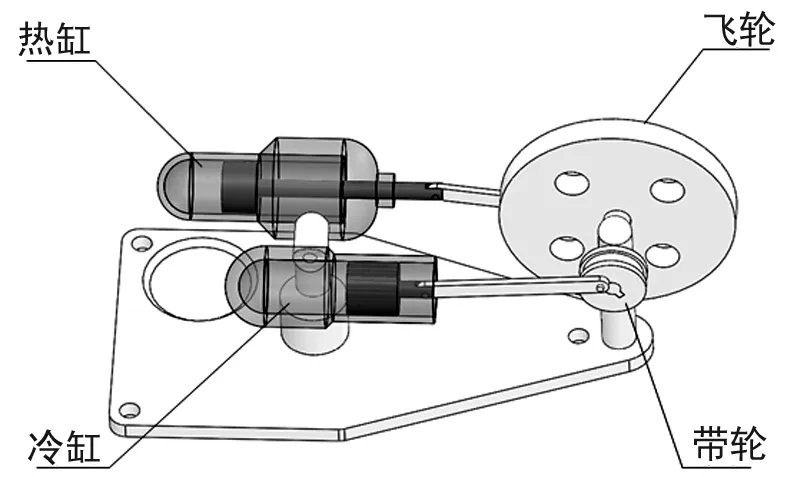
圖7 斯特林發動機
該發動機是一種由外部供熱使氣體在不同溫度下作周期性壓縮和膨脹的閉式循環往復式外然發動機,由熱缸、冷缸、配氣活塞、做功活塞、曲柄連桿、飛輪等構成,如圖所示。該發動機結構簡單,效率較高。
(2) 傳動機構 傳動機構采用帶傳動和齒輪傳動,在設計過程中,應始終堅持原則:小車結構盡量簡單,傳動件數少,操作和調整方便靈活[4]。因此在發動機帶輪和后輪軸間使用二級皮帶傳動,傳動比分別為2和4,以減小發動機飛輪速度,增大力矩。在后輪軸及凸輪軸之間使用二級齒輪傳動,結構簡單緊湊、效率高。
利用Matlab計算出小車軌跡的長度,以最長的小車輪子的軌跡長度設計齒輪傳動比,小車行走一圈軌跡長度L=11.232 4 m,則小車行走一圈軌跡后輪轉圈數n1=L/π·D2=20 r,小車行走一圈軌跡凸輪轉圈數n4=1 r。

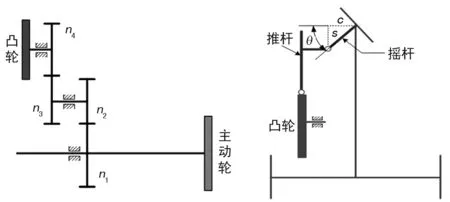
圖8 齒輪輪系圖9 小車轉向機構簡圖
(3) 轉向機構 轉向機構是小車設計的關鍵部分[5],筆者采用盤形凸輪機構,轉向機構簡圖如圖9所示。在得到準確的小車軌跡后,前輪轉角的變化便確定下來,通過前輪轉角θ與凸輪推程s的關系可設計出凸輪輪廓。圖中,凸輪推程s=tanθ·c,則凸輪從動件位移S=R0+s,R0為凸輪基圓半徑。
使用微元法將凸輪輪廓按角度均等分成M份,設主動輪每走過dx長度,對應凸輪轉過(360/M)°,在Matlab中,對從動件位移點進行曲線擬合,調試c與R0值可得到合適的理論凸輪輪廓,如圖10所示。
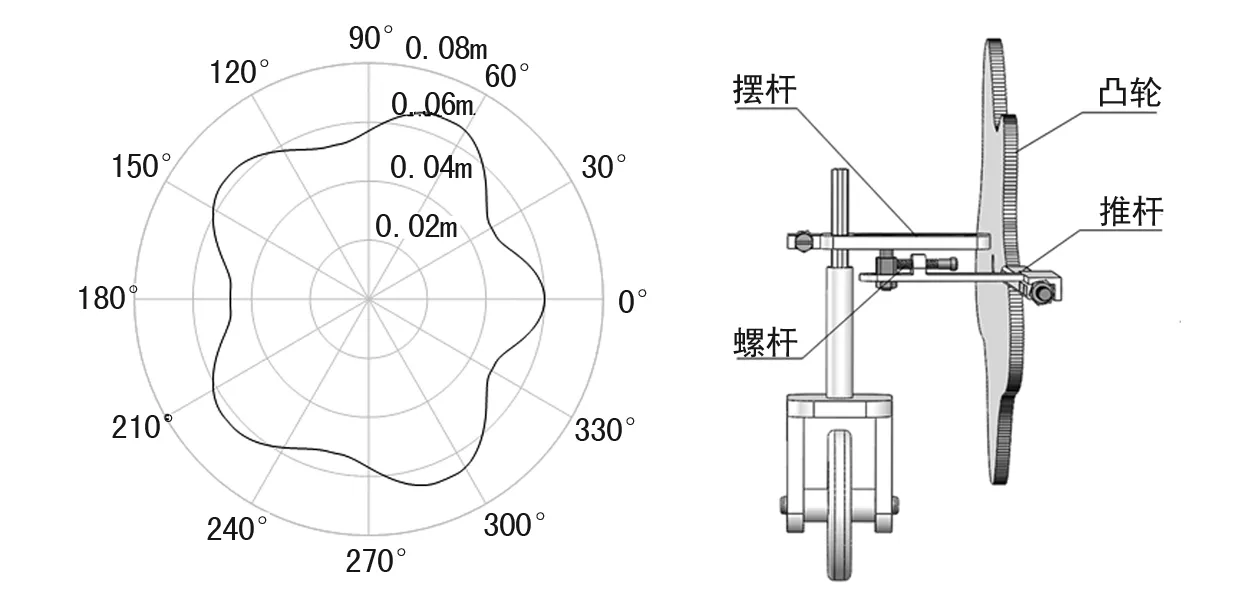
圖10 理論凸輪輪廓 圖11 微調機構
在得到理論凸輪輪廓后,考慮凸輪機構從動件推桿滾子的半徑,在SolidWorks中可建立實際凸輪的三維模型。
(4) 微調機構 小車微調機構如圖11所示。通過調節微調機構的螺桿改變轉向機構中的搖桿長度c,精確調節前輪轉向角度θ,從而調整小車軌跡,實現小車準確避障。
2.3 場地變樁后的零件調整設計
比賽規定,決賽時賽道障礙樁數量和間距均要改變,小車有環形、“8”字和綜合三種運行方式,現以一種可能出現的決賽情形進行分析,如圖12所示,小車選擇“8”字運行方式。
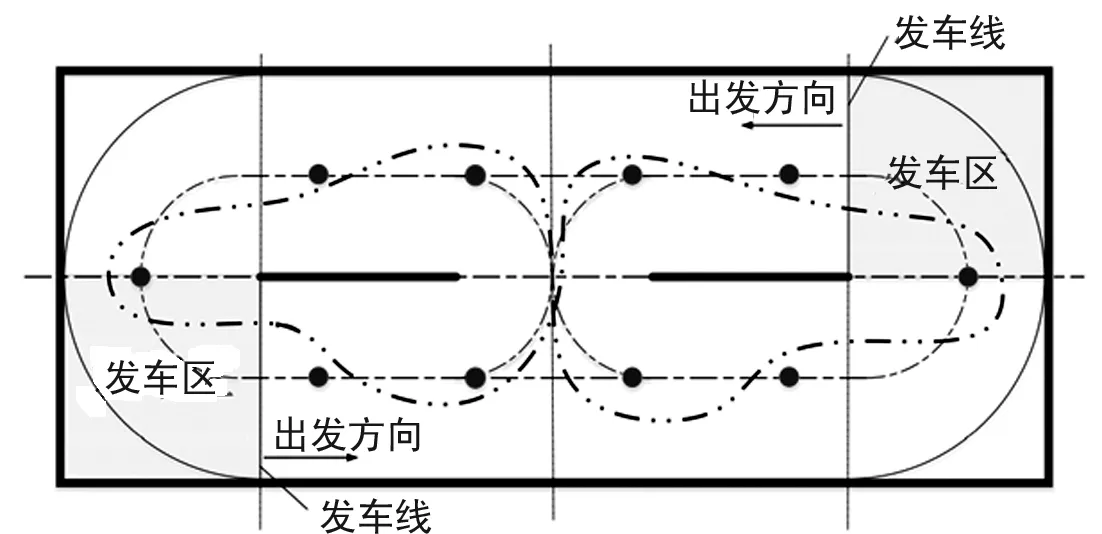
圖12 驅動車8字運行方式示意圖
按照初賽小車軌跡設計思路,重新設計前輪轉角變化曲線,調試相關參數在Matlab中可得到決賽小車軌跡,如圖13所示。
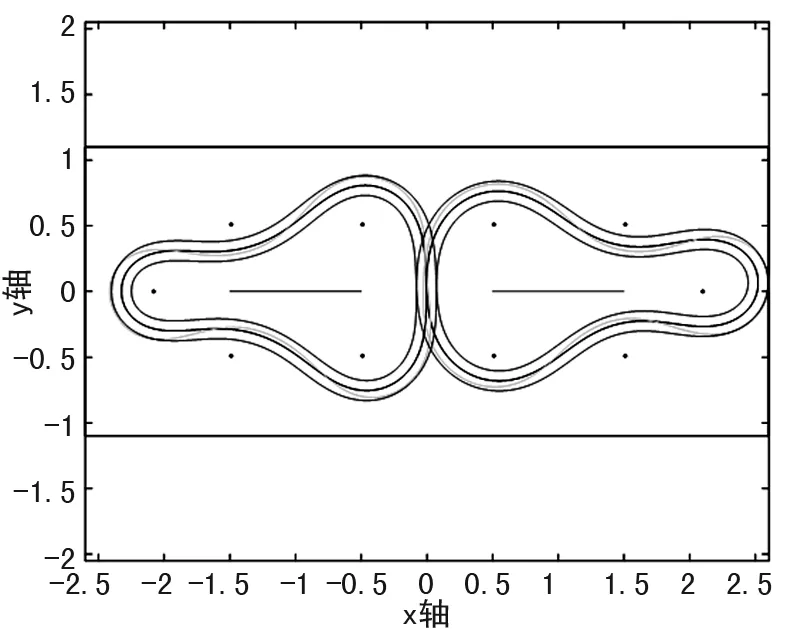
圖13 決賽小車軌跡
為減少重新加工零件的個數,小車的傳動機構,即帶傳動與二級齒輪傳動的零件不重新設計加工,場地變樁后的零件調整方案為保持帶傳動與二級齒輪傳動的傳動比不變,只重新設計凸輪與小車后輪。
利用Matlab計算出決賽時小車行走一圈軌跡的長度L′=11.368 8 m。二級齒輪未改變,其傳動比i14為20,小車行走一圈軌跡凸輪轉1圈,則主動輪圈數n1=20 r,需重新制作的后輪直徑:
按照前述凸輪設計方法,在Matlab中調整相關參數可得到需調整的理論凸輪的輪廓,如圖14所示。
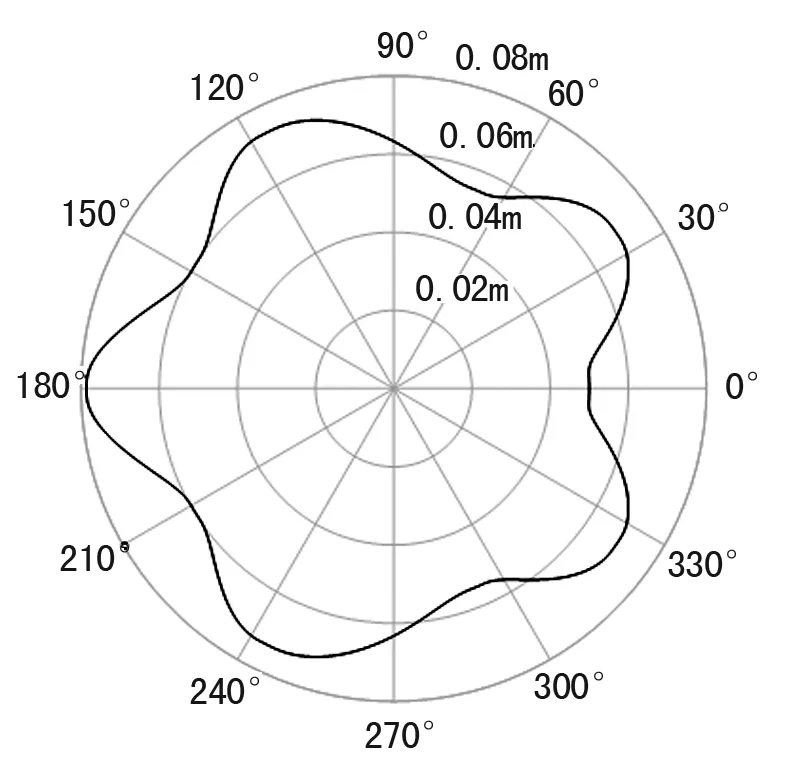
圖14 決賽理論凸輪輪廓
最后,在利用SolidWorks進行零件三維建模的基礎上,通過數控加工和激光切割等工藝制作出小車零件,裝配得到的小車實物如圖15所示。通過對樣機測試,驗證了筆者設計出的熱能驅動車能夠行駛出環形“S”字軌跡,且小車行駛軌跡精度較高,檢驗了文中小車設計中的可行性和實效性。
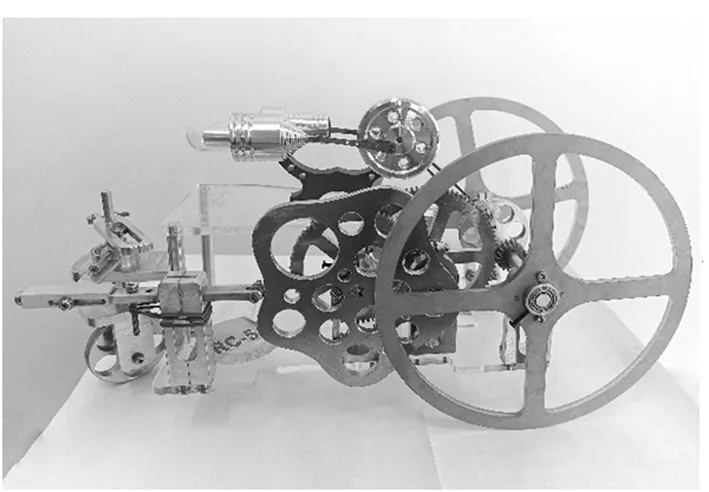
圖15 小車實物
3 結 語
文中所設計的基于凸輪機構的熱能驅動車在運動軌跡和結構上進行了一定程度的創新和優化,利用Matlab進行小車運動軌跡仿真,并實現不同路徑的熱能驅動車通用設計,只需更換凸輪和后輪即可完成不同的路徑。實際的試驗也表明此次設計是合理有效的,能使熱能驅動車的運動軌跡得到優化。文中所體現的創新設計和創新思維對此類競賽具有一定的現實指導意義。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04