基于六自由度閉環(huán)彈道的脈沖多普勒雷達(dá)導(dǎo)引頭仿真
2021-09-22 05:17:46戴幻堯王德旺崔建嶺
航天電子對抗 2021年4期
關(guān)鍵詞:測量
戴幻堯,馬 磊,王德旺,崔建嶺
(1.電子信息系統(tǒng)復(fù)雜電磁環(huán)境效應(yīng)國家重點(diǎn)實(shí)驗(yàn)室,河南洛陽 471003;2.上海機(jī)電工程研究所,上海 201109)
0 引言
地空導(dǎo)彈(SAM)作為典型的精確制導(dǎo)武器在現(xiàn)代防空作戰(zhàn)中的應(yīng)用得越來越廣泛。很多實(shí)驗(yàn)手段包括數(shù)學(xué)建模、半實(shí)物仿真和外場實(shí)驗(yàn)等,都有助于SAM的參數(shù)設(shè)計(jì)和性能評估。六自由度閉環(huán)彈道仿真提供了一種有效且低成本的解決方案,并且被廣大SAM設(shè)計(jì)人員所采納。然而,亟須針對SAM的制導(dǎo)和控制回路(GCL)建立足夠精確的數(shù)學(xué)模型,包括動力學(xué)特性、導(dǎo)引頭、制導(dǎo)律、指令控制、舵機(jī)模型和推進(jìn)器模型[1],且模型的準(zhǔn)確性直接關(guān)系到制導(dǎo)的準(zhǔn)確性。脈沖多普勒雷達(dá)導(dǎo)引頭(PDRS)作為關(guān)鍵的角度敏感器件,在現(xiàn)代SAM中有著比較廣泛的應(yīng)用[2]。脈沖多普勒(PD)雷達(dá)的工作原理就是相干脈沖發(fā)射機(jī)利用多普勒效應(yīng),獲得雷達(dá)和目標(biāo)的相對運(yùn)動信息,在雜波和接收機(jī)噪聲中選擇指定的目標(biāo)。然后,PD雷達(dá)的一系列窄帶濾波器處理由目標(biāo)反射回的雷達(dá)信號,對信號相干合成。PDRS輸出的彈目相對視線角(LOS)和視線角速率最終送入制導(dǎo)律生成器中。
傳統(tǒng)研究中,為便于簡化和計(jì)算方便,對PDRS進(jìn)行功能級仿真不能反映電磁波傳播和散射的全過程,也不能再現(xiàn)雷達(dá)信號在接收機(jī)和數(shù)字信號處理機(jī)中的相干處理全過程,因此無法滿足準(zhǔn)確的六自由度閉環(huán)彈道仿真需求,特別是無法滿足電子對抗條件下的應(yīng)用需求。與之相比,相干視頻仿真能夠完整地描述電磁波發(fā)射、傳播、后向散射、天線接收、接收機(jī)處理、數(shù)字信號處理和數(shù)據(jù)處理的全部過程,為SAM的參數(shù)設(shè)計(jì)和性能評估提供了全面和有效的技術(shù)途徑。由于相干視頻仿真具有相當(dāng)高的計(jì)算量,并且研發(fā)周期長,因此在六自由度閉環(huán)彈道仿真中較少受到研發(fā)人員的青睞,導(dǎo)彈空氣動力學(xué)特性、制導(dǎo)律和指令控制方面的研究更受關(guān)注。然而,為了完成精確的閉環(huán)彈道仿真,設(shè)計(jì)人員必須準(zhǔn)備一些PDRS的相干視頻仿真模型,例如為了評估電子對抗條件下的SAM性能,必須建立足夠多的導(dǎo)引頭模型,從而分析干擾對導(dǎo)引頭命中精度的影響程度。與傳統(tǒng)的功能級仿真相比,這樣的工作通過PDRS相干視頻仿真很容易完成。
本文首先簡要地分析和討論了PDRS作為關(guān)鍵的角度敏感器件在SAM制導(dǎo)控制環(huán)路中的作用。然后,討論了PDRS相干視頻仿真涉及的主要內(nèi)容,包括雷達(dá)導(dǎo)引頭天線建模、目標(biāo)散射特性、接收機(jī)處理、信號處理器設(shè)計(jì)和數(shù)據(jù)處理中的濾波機(jī)制。設(shè)計(jì)了一個六自由度閉環(huán)彈道仿真系統(tǒng),考慮了制導(dǎo)規(guī)律和指令控制等關(guān)鍵要素。通過一個典型的防空作戰(zhàn)場景對本文給出的模型進(jìn)行仿真驗(yàn)證,討論了相干視頻仿真和飛行仿真的實(shí)驗(yàn)結(jié)果。
1 問題陳述
1.1 制導(dǎo)控制環(huán)路GNC
圖1給出了SAM在交戰(zhàn)中所需要的制導(dǎo)和控制回路,需要考慮目標(biāo)的最大飛行速度、最低高度、隱身性能和操控性能、自衛(wèi)式電子干擾、自動駕駛儀、舵偏角要求值、空氣動力特性等。
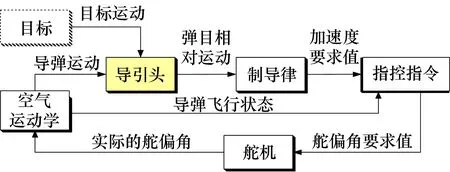
圖1 地空導(dǎo)彈制導(dǎo)和控制回路
導(dǎo)引頭輸出的彈目相對運(yùn)動測量值,將通過指定的制導(dǎo)律,轉(zhuǎn)換為3軸加速度指令,本文所采用的是修正比例導(dǎo)引。由于要獲得導(dǎo)彈的實(shí)時飛行狀態(tài)和彈體高度,控制指令單元將會產(chǎn)生控制指令,傳送給后續(xù)的執(zhí)行裝置。例如導(dǎo)彈打擊既定目標(biāo)時,尾翼為了保持彈體穩(wěn)定,需要輸入加速度要求值。尾翼舵機(jī)對轉(zhuǎn)角產(chǎn)生響應(yīng),進(jìn)而達(dá)到實(shí)際舵偏角。只要舵偏角發(fā)生改變,SAM攔截器就會啟動空氣動力學(xué)控制,完成一次六自由度的閉環(huán)彈道仿真。
1.2 導(dǎo)引頭在制導(dǎo)控制回路中的作用
在SAM的末制導(dǎo)階段,導(dǎo)引頭作為角度敏感器件在制導(dǎo)控制回路中具有重要作用。SAM中攜帶的有主動雷達(dá)導(dǎo)引頭,在導(dǎo)引頭內(nèi)部框架坐標(biāo)系下測量彈目相對距離、距離變化率、框架角和視線角速率。制導(dǎo)尋的的基礎(chǔ)就是將導(dǎo)引頭測量值轉(zhuǎn)換為加速度要求值。在強(qiáng)雜波和接收機(jī)噪聲中,PDRS利用多普勒效應(yīng)來選擇和跟蹤目標(biāo),并且輸出連續(xù)的和實(shí)時的彈?目相對運(yùn)動測量值。但是,該測量值通常會受到遮擋效應(yīng)、角閃爍和雷達(dá)目標(biāo)RCS起伏和熱噪聲的污染。例如,在高重頻模式(HPRF)下的導(dǎo)引頭,會間斷性地產(chǎn)生遮擋損耗,使得測量值周期性地?zé)o法利用,這會直接影響制導(dǎo)精度[3]。最壞的情況就是在尾追的情況下,敵方采用自衛(wèi)電子干擾例如噪聲阻塞式干擾或投擲式有源誘餌(TRAD),在這些雷達(dá)干擾的作用下,導(dǎo)引頭的目標(biāo)跟蹤回路和制導(dǎo)控制回路會受到中斷。因此,在電子干擾尋的應(yīng)用場景中,導(dǎo)引頭需要設(shè)計(jì)估計(jì)器來協(xié)助視線角速率的估計(jì),進(jìn)而維持基本的目標(biāo)跟蹤。
2 視頻建模
2.1 PDRS總體思路
根據(jù)PD雷達(dá)采用的低、中、高重復(fù)頻率波形,它具有多種不同的工作模式。因此脈沖多普勒雷達(dá)導(dǎo)引頭設(shè)計(jì)中最重要的就是脈沖重復(fù)頻率的選擇,PD雷達(dá)可以分為低重頻(多普勒模糊)、高重頻(距離模糊)和中重頻(中等模糊)3類。
在多種波形中選擇重復(fù)頻率主要取決于SAM的應(yīng)用場景。視線角和視線角速率主要用于計(jì)算加速度要求值,這是非常必要的,而斜距和距離變化率測量相比較而言就并非絕對需要,盡管在目標(biāo)跟蹤回路和其它先進(jìn)的制導(dǎo)律中(例如最優(yōu)制導(dǎo)律)可能會用到該信息。無論彈目相對距離和距離變化率是否正確,只要維持角度跟蹤回路的正常工作,PDRS就能夠保持基本的尋的制導(dǎo)。
文獻(xiàn)[2]的例子指出,小孔徑高速彈載雷達(dá)導(dǎo)引頭采用低重頻脈沖多普勒設(shè)計(jì)會帶來主瓣地雜波的譜線擴(kuò)展的問題,導(dǎo)致目標(biāo)在頻域檢測(速度域)產(chǎn)生較大的遮擋。然而,彈載雷達(dá)導(dǎo)引頭采用中重頻(MPRF)設(shè)計(jì)能夠覆蓋較寬頻譜,既能消除慢速移動目標(biāo),又可以覆蓋大部分目標(biāo)方位,提供相對準(zhǔn)確的距離信息。但是MPRF會引起距離和多普勒模糊,造成近距離旁瓣進(jìn)入的回波形成雜波,在相同多普勒區(qū)間相互交疊并占據(jù)目標(biāo)回波所處的多普勒單元,提高了多普勒處理的設(shè)計(jì)難度。HPRF波形能夠提供無雜波目標(biāo)檢測區(qū)間,從而更容易地分辨速度接近的目標(biāo),這對SAM作戰(zhàn)場景是非常重要的。HPRF設(shè)計(jì)需要復(fù)雜的方法來解決距離模糊,然而,對于SAM的跟蹤回路來說,距離模糊并非關(guān)鍵問題,只需要多普勒濾波器就可以維持目標(biāo)穩(wěn)定跟蹤。因此,導(dǎo)引頭可以通過準(zhǔn)連續(xù)波處理,在強(qiáng)地雜波和海雜波背景下來選擇具有特定徑向速度的目標(biāo),而不需要距離/距離變化率信息。
通過上面的分析,針對彈載平臺采用HPRF波形設(shè)計(jì),給出了PDRS相干視頻仿真結(jié)構(gòu)實(shí)現(xiàn)框圖,如圖2所示。
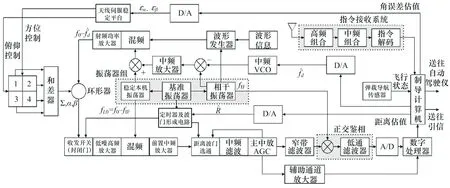
圖2 雷達(dá)導(dǎo)引頭技術(shù)實(shí)現(xiàn)方案
2.2 天線建模
天線建模是PDRS仿真的基礎(chǔ),單個天線的方向圖可近似地用辛格函數(shù)來表示:

式中,θ是相對于天線波束視線方向的夾角,可以分別表示方位角和俯仰角。θ0為零功率波束寬度,G0是最大增益。公式(1)僅考慮了第一零點(diǎn)內(nèi)的天線方位圖增益,在零功率波束寬度之外的天線增益,例如第一旁瓣和第二旁瓣也可以用sinc函數(shù)表示。天線參數(shù)設(shè)計(jì)可以參考實(shí)際測量實(shí)驗(yàn)的結(jié)果,如圖3所示。只要單個波束的天線方向圖是確定的,就可以計(jì)算給定目標(biāo)方向的和、方位差、俯仰差3個通道的電壓增益,以生成相應(yīng)的回波信號;輸出方位差、俯仰差2個通道的測角斜差率,以滿足單脈沖天線測角的需要。
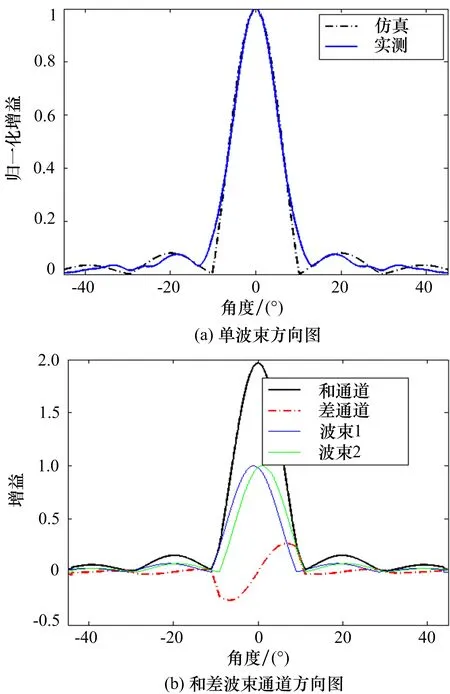
圖3 導(dǎo)引頭天線仿真結(jié)果
2.3 雷達(dá)目標(biāo)散射特性
通過高頻電磁計(jì)算可以對目標(biāo)散射特性進(jìn)行準(zhǔn)確的建模,例如采用物理光學(xué)法計(jì)算飛機(jī)目標(biāo)的遠(yuǎn)場散射特性,主要是后向散射特性。將F-16的實(shí)際尺寸作為典型的電大尺寸目標(biāo)(約70倍波長),來檢驗(yàn)物理光學(xué)法的有效性。這里,采用非均勻有理B樣條方法(NURBS)來對飛機(jī)目標(biāo)建模[4]和網(wǎng)格剖分。
電磁計(jì)算中入射電磁波的頻率是15.8 GHz,入射波的俯仰角為90°,方位角從0°到180°均勻變化,變化步長是10°。圖4給出了電磁計(jì)算得到的散射特性結(jié)果,并和Feko計(jì)算結(jié)果進(jìn)行了比較。可以看出該類電大尺寸的復(fù)雜結(jié)構(gòu)目標(biāo)能夠獲得比較高的計(jì)算精度,可以用于PDRS建模中導(dǎo)引頭天線口徑接收到的目標(biāo)后向散射回波的模擬。
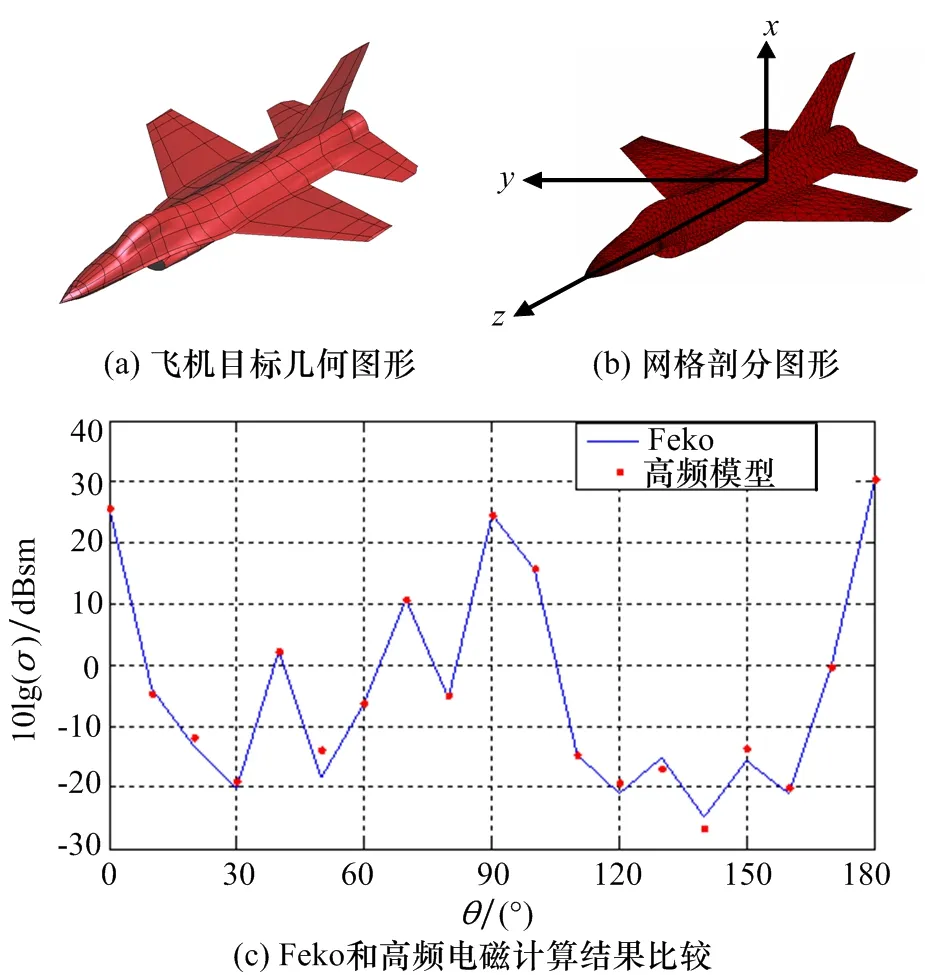
圖4 目標(biāo)散射特性
2.4 接收機(jī)處理
如圖2所示,通過下變頻處理,導(dǎo)引頭接收機(jī)將目標(biāo)回波信號從射頻轉(zhuǎn)換為中頻fIF,距離波門τG用來選擇目標(biāo)回波,從而排除波門以外的雜波和噪聲信號。中頻濾波器和AGC共同作用,將中頻信號序列從疊加的熱噪聲、干擾、雜波中濾波分選出來,實(shí)時地調(diào)整接收機(jī)中放增益,從而使其輸出信號功率落入特定范圍中,以滿足信號I/Q正交解調(diào)處理的要求。不同于傳統(tǒng)的雷達(dá)導(dǎo)引頭中的匹配濾波處理,HPRF設(shè)計(jì)可以保證譜線之間具有足夠的間隔,因而允許對頻譜的中心譜線進(jìn)行多普勒濾波,從而提取和跟蹤中心譜線。窄帶濾波后的單譜線信號實(shí)際上是準(zhǔn)連續(xù)波,后續(xù)的數(shù)字信號處理器完成頻域的目標(biāo)檢測和跟蹤。然而,還需要一個輔助通道來覆蓋一個大帶寬,這樣會有利于抗干擾和雜波抑制[5]。
2.5 數(shù)字信號處理
數(shù)字信號處理(DSP)包括:雜波對消,時域加權(quán),F(xiàn)FT,頻域相干/非相干積累,CFAR檢測,主控和角誤差測量。導(dǎo)引頭通過DSP完成狀態(tài)控制與邏輯切換,完成了雜波、噪聲或電子干擾環(huán)境中的目標(biāo)檢測和跟蹤,如圖5所示。
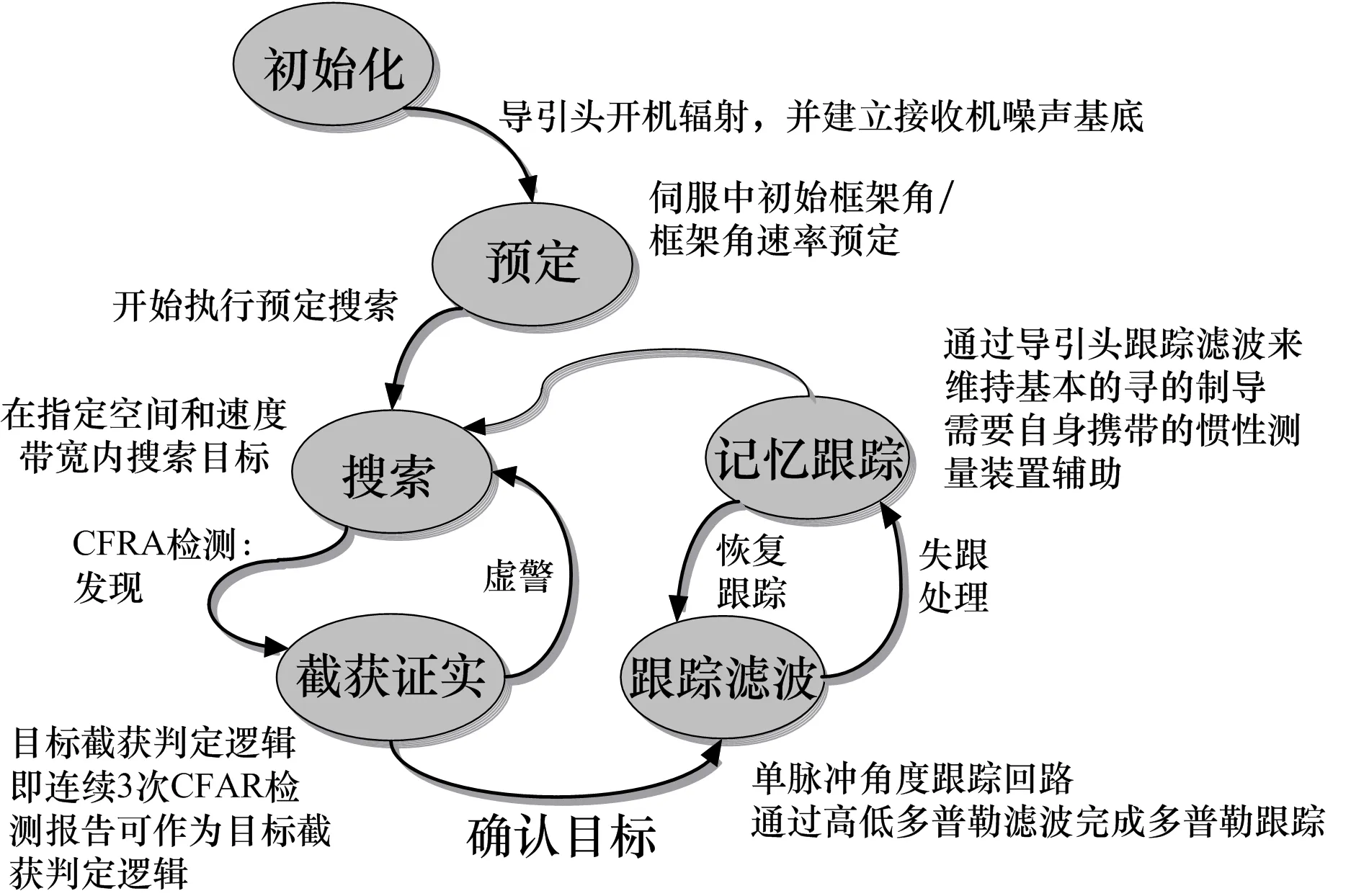
圖5 導(dǎo)引頭狀態(tài)切換和邏輯判斷
雖然采用HPRF波形時將產(chǎn)生嚴(yán)重的距離模糊,但是導(dǎo)彈通常不需要距離跟蹤回路,因此不需要測量彈目相對距離。距離接近變化率可以在準(zhǔn)連續(xù)多普勒濾波器中通過跟蹤中心譜線來獲得,通常需要參考高?低多普勒濾波器輸出。通過單脈沖測角處理得到關(guān)于天線法線方向的視線角誤差。DSP中采取的算法和模型可以參考文獻(xiàn)[2,6]。
2.6 數(shù)據(jù)處理中的跟蹤濾波器設(shè)計(jì)
如第1節(jié)所述,導(dǎo)引頭需要設(shè)計(jì)估計(jì)器來輔助估計(jì)視線角速率。具體而言,估計(jì)垂直于視線方向的2個速率分量,是雷達(dá)導(dǎo)引頭系統(tǒng)的基本工作。文獻(xiàn)[3]給出了一種基于修正球坐標(biāo)系(MSC)角度測量數(shù)據(jù)的跟蹤濾波器設(shè)計(jì)方法。MSC跟蹤濾波器采用一組獨(dú)特跟蹤狀態(tài)的集合X,包括二維角度、二維角速率以及距變率和距離的比(ITG),可表示為:

式中ε,η是視線方位角和俯仰角。

高階非線性運(yùn)動方程可以定義如下:
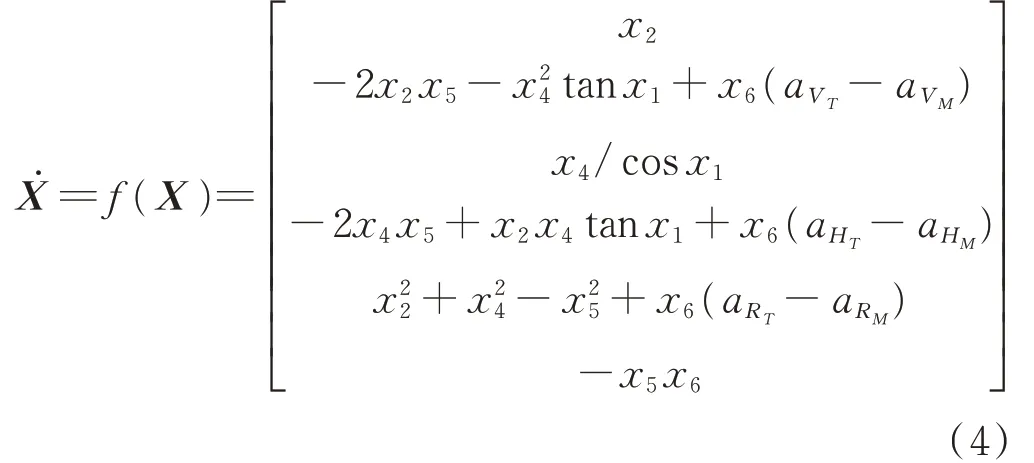
式中,a V T、a H T、a RT是目標(biāo)垂直加速度、水平加速度和徑向加速度,a V M、a H M、a RM對應(yīng)著SAM的垂直加速度、水平加速度和徑向加速度。公式(4)中動態(tài)系統(tǒng)的高階非線性特征導(dǎo)致了傳統(tǒng)卡爾曼濾波不再適用。因此,需要對其進(jìn)行二維擴(kuò)展。一種方法就是可以采用擴(kuò)展卡爾曼濾波(EKF),這是基于泰勒級數(shù)展開的一種聯(lián)合分布,也可以采用基于不敏變換的UKF。為了簡化執(zhí)行步驟,通過簡化歐拉積分對式(4)的連續(xù)時間動態(tài)模型進(jìn)行了離散化處理。為了提高計(jì)算效率,采用龍格庫塔積分進(jìn)行解算會更加方便。
3 閉環(huán)彈道仿真器
3.1 制導(dǎo)律
制導(dǎo)律中最基本的是常規(guī)比例導(dǎo)引律(PN)。圖6給出了防空攔截作戰(zhàn)的幾何示意圖。
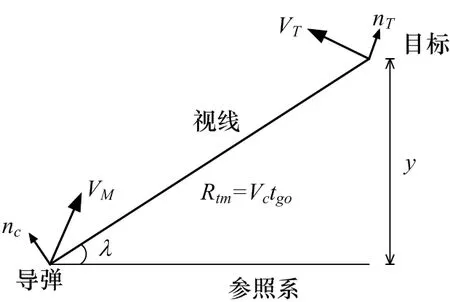
圖6 作戰(zhàn)幾何示意圖
制導(dǎo)律可以簡寫為:

式中,N′為有效導(dǎo)航比;V c為逼近速度?為視線角速率。
公式(5)可以進(jìn)一步寫為:

式中,tgo為飛行時間;y為高度差;y?為相對目標(biāo)率。
括號項(xiàng)代表可能的脫靶距離(不考慮目標(biāo)機(jī)動),如果SAM不修正加速度,可以稱之為零效脫靶量(ZEM),也就是說如果目標(biāo)沒有機(jī)動,那么PN導(dǎo)引率會導(dǎo)致零脫靶量。但是如果目標(biāo)機(jī)動并且加速度為n T,PN仍能保持零脫靶量。PN加速度指令和ZEM成正比,目標(biāo)機(jī)動會修正ZEM。因此,首先要做的就是在要針對目標(biāo)機(jī)動考慮ZEM的一個修正誤差項(xiàng)。形成修正比例導(dǎo)引(APN),可以表示如下:

可以看出,APN制導(dǎo)律需要目標(biāo)加速度的估計(jì)來補(bǔ)償目標(biāo)機(jī)動帶來的誤差,還需要估計(jì)飛行時間用以解算導(dǎo)引頭輸出。
3.2 控制律(傾斜轉(zhuǎn)彎控制指令)
根據(jù)APN加速度指令,SAM中的控制單元能夠生成舵偏角指令。通常采取傾斜轉(zhuǎn)彎(BTT)控制律使導(dǎo)彈指向預(yù)定目標(biāo)并且穩(wěn)定彈體。實(shí)時導(dǎo)彈飛行狀態(tài)都是需要的信息,包括俯仰和偏航軸的加速度、彈體轉(zhuǎn)速。具體的控制過程比較復(fù)雜,可以參考文獻(xiàn)[7]。
導(dǎo)彈的尾翼對BTT控制指令進(jìn)行響應(yīng),進(jìn)而形成實(shí)際的俯仰、偏航、橫滾通道的舵偏角,SAM的空氣動力學(xué)特性以及導(dǎo)彈的飛行狀態(tài)也發(fā)生相應(yīng)的改變,從而完成六自由度閉環(huán)彈道仿真全過程。
4 仿真分析
4.1 場景描述
考慮一個典型的空戰(zhàn)場景,只關(guān)注末制導(dǎo)段,中段制導(dǎo)采用慣性導(dǎo)航,表1給出了部分關(guān)鍵參數(shù)。
表1 仿真參數(shù)設(shè)置
4.2 仿真結(jié)果分析
六自由度閉環(huán)導(dǎo)彈仿真過程描述如下:將實(shí)時的導(dǎo)彈和目標(biāo)飛機(jī)的運(yùn)動數(shù)據(jù)送入接收機(jī)模型,其它數(shù)據(jù)包括通過天線模型、目標(biāo)散射模型、HPRF波形引入的遮擋損耗,彈目徑向運(yùn)動引入的多普勒頻移以及距離變化引入的電波傳播時間差。經(jīng)過方位通道和俯仰通道接收到的目標(biāo)回波通過接收機(jī)模型處理后,轉(zhuǎn)換為中頻信號。通過窄帶濾波器進(jìn)一步處理提取頻譜的中心譜線,并將中頻信號轉(zhuǎn)換為I/Q視頻序列。雜波對消和后續(xù)的多普勒濾波處理有助于中心譜線的跟蹤并在速度域形成閉環(huán)目標(biāo)跟蹤。利用單脈沖測角模型來提取框架角誤差,這些誤差信號送入MSC中的跟蹤濾波器。一旦完成估計(jì),就可以調(diào)整距離波門,多普勒跟蹤和角度跟蹤回路來完成一次閉環(huán)跟蹤。初始的視線角速率是通過上面的濾波器估計(jì)得到的,尋的制導(dǎo)通過APN制導(dǎo)律完成。通過BTT控制單元生成舵偏角指令,引導(dǎo)導(dǎo)彈朝指定目標(biāo)尋的并且穩(wěn)定彈體。尾翼會對角度控制指令產(chǎn)生響應(yīng),進(jìn)而獲得實(shí)際的三軸舵偏角。SAM受到空氣動力學(xué)參數(shù)控制,綜上所述即完成了六自由度閉環(huán)彈道仿真。圖7給出彈目相對運(yùn)動的仿真結(jié)果。
圖7 參考系中彈目相對運(yùn)動
雷達(dá)導(dǎo)引頭的相干視頻仿真結(jié)果如圖8所示。歸一化頻譜清晰地反映了彈目徑向速度帶來的多普勒頻移。通過DSP中的多普勒濾波可以獲得該目標(biāo)速度跟蹤回路中的多普勒頻移。從SNR曲線中可以看出當(dāng)導(dǎo)引頭采用HPRF波形時會間歇性地產(chǎn)生遮擋效應(yīng),使得導(dǎo)引頭周期性的無法獲得測量值。
圖8 I/Q相干視頻序列頻譜和SNR曲線
圖9給出了測量的框架角誤差結(jié)果,通過單脈沖測角技術(shù)可以獲得目標(biāo)關(guān)于天線視線方向的角誤差,達(dá)到較高的測量精度(近似1 mrad),這保證了尋的制導(dǎo)的精度,提高了抗箔條干擾和投擲式有源誘餌的角度欺騙能力。
圖9 框架角誤差測量值
角度跟蹤階段,將方位、俯仰框架角誤差轉(zhuǎn)換至天線執(zhí)行系中,從而調(diào)整當(dāng)前的偏航框架角和俯仰框架角。將測量的視線角和真實(shí)測量值進(jìn)行比較,如圖10所示,可見該方法具有較好的角度估計(jì)精度。然而,在電子對抗條件下,導(dǎo)引頭的角度跟蹤回路會受到干擾,此時測角性能就會降低。
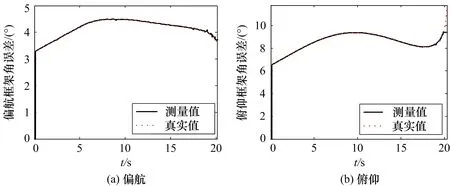
圖10 視線角測量結(jié)果對比
4.3 電子對抗情形
在電子對抗條件下,例如在速度波門拖引(VGPO)干擾下,導(dǎo)引頭的多普勒跟蹤回路會中斷,不能正確提取彈目的接近速度,如圖11所示,尋的制導(dǎo)精度因此受到影響(脫靶量從2.48 m上升到56.95 m)。可以看出,PDRS相干視頻仿真能有效地評估電子干擾對導(dǎo)引頭尋的精度和制導(dǎo)精度的影響。
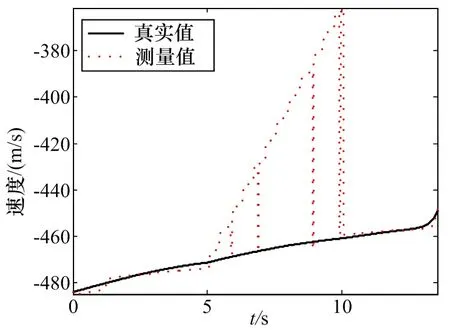
圖11 速度波門拖引條件下的速度測量
5 結(jié)束語
本文討論了六自由度閉環(huán)彈道仿真中的PDRS相干視頻仿真,為SAM的參數(shù)設(shè)計(jì)和性能評估提供了有效的解決方案。■
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00