一種基于能量差的傳感網定位方法
2021-09-22 05:18:16皮興宇黃中華陳昌云王榮兵王愛華
航天電子對抗 2021年4期
皮興宇,黃中華,陳昌云,王 磊,王榮兵,王愛華
(1.中國航天科工集團8511研究所,江蘇 南京 210007;2.中國人民解放軍93929部隊,北京 100843)
0 引言
確定目標位置或獲取消息的節點位置是無線傳感網的基本功能之一,對傳感網應用的有效性起著關鍵作用[1?2]。
目前,無線傳感網定位技術有很多種,其中基于接收信號能量(RSSI)的定位方法主要有2類[3?4]:基于場強地圖的指紋匹配法和基于信號衰減模型的定位法。這2種方法都需要提前對環境進行測量實驗以得到某些參數信息。基于場強地圖指紋匹配定位方法是首先利用實測參考信號強度建立生成信號強度分布圖,最后采用指紋匹配算法確定目標位置[5?7]。基于信號衰減模型定位方法是根據發射節點的發射信號能量和接收節點的接收信號能量來計算出無線信號的傳播損耗,并利用理論或經驗模型將信號傳輸損耗轉化為距離信息進行定位[8?11]。此類方法基本都需前期的大量測試實驗來得到模型參數,本文提出的基于信號衰減模型的定位方法,主要考慮一維特殊環境下的定位情況,通過簡化信號能量衰減模型、降低環境對定位方法的影響來提高定位性能。
1 接收信號能量(RSSI)測距模型
無線信號的傳播損耗不但與自然環境有關,而且還會受到信號反射、繞射和衍射等因素影響,這些問題使得準確刻畫無線信號衰落模型成為一個技術上的難題。
一般來說,描述無線信號的衰減模型為[7?8]:
式中,P為信號強度,單位為dBm;d為發射與接收之間的距離;P(d0)為距離發射節點參考距離d0處的接收能量,通常d0=1m;α為衰減指數;Xσ為零均值、方差σ的高斯隨機變量。
不同環境下參數P(d0)和α的取值是不同的。實際上要非常準確估計這2個參數比較困難,因此簡化模型、減少參數估計會使性能得到提高。考慮一維環境,比如煤礦、地鐵、公路隧道或大型建筑物走廊等多種場景,在這種場景中,空間一般是狹長的,此時往往關心的只是長度方向上的位置信息,因此可以將其抽象為一維的。
2 定位模型
2.1 問題說明
如圖1所示,分析巷道環境下將定位問題近似為一維場景時的誤差情況。以2個參考節點為例,假設2參考節點間距離為d,巷道寬度為h。目標節點相對于參考節點i和j的實際距離分別為s′和s″,定位估計距離分別為s和d?s。一般來說h≤2 m,則有s′=(s2+h2)1/2。分析比較估計距離s和真實距離s′間的誤差,如圖2所示,橫坐標表示目標節點與參考節點i的估計距離大小,縱坐標表示估計距離與真實距離間的誤差大小。從圖2中可以看出,當目標節點離參考節點較近時(跟巷道寬度相當時),進行一維近似定位誤差較大,但最大在1 m左右。隨著兩者距離的增大,近似誤差已經很小了。因此在實際定位算法處理中,可根據距離較遠的參考節點j來估計目標節點位置,以減小一維近似帶來的定位誤差。
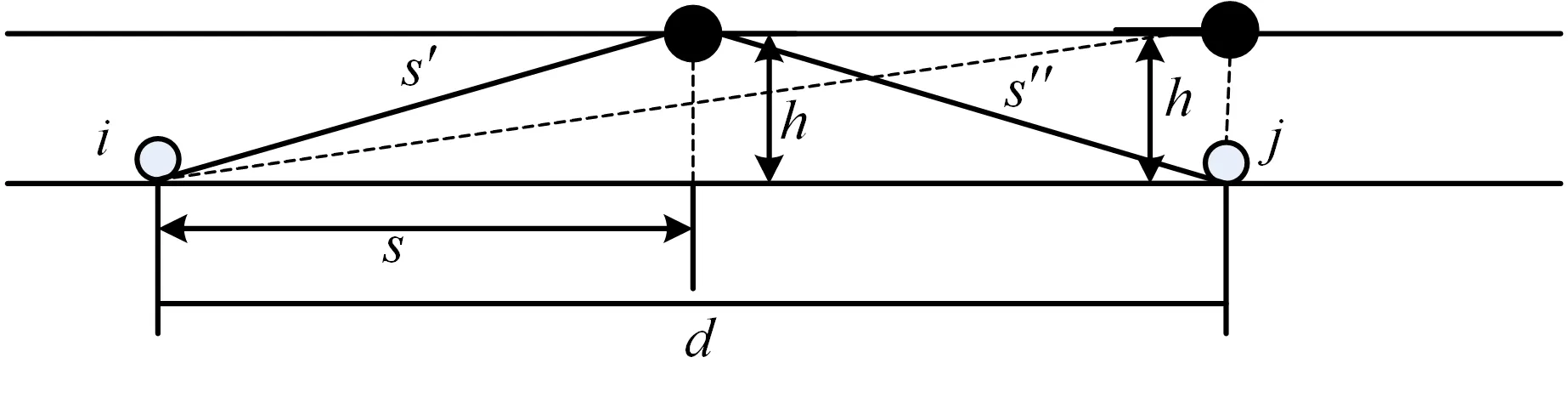
圖1 一維近似定位場景示意圖
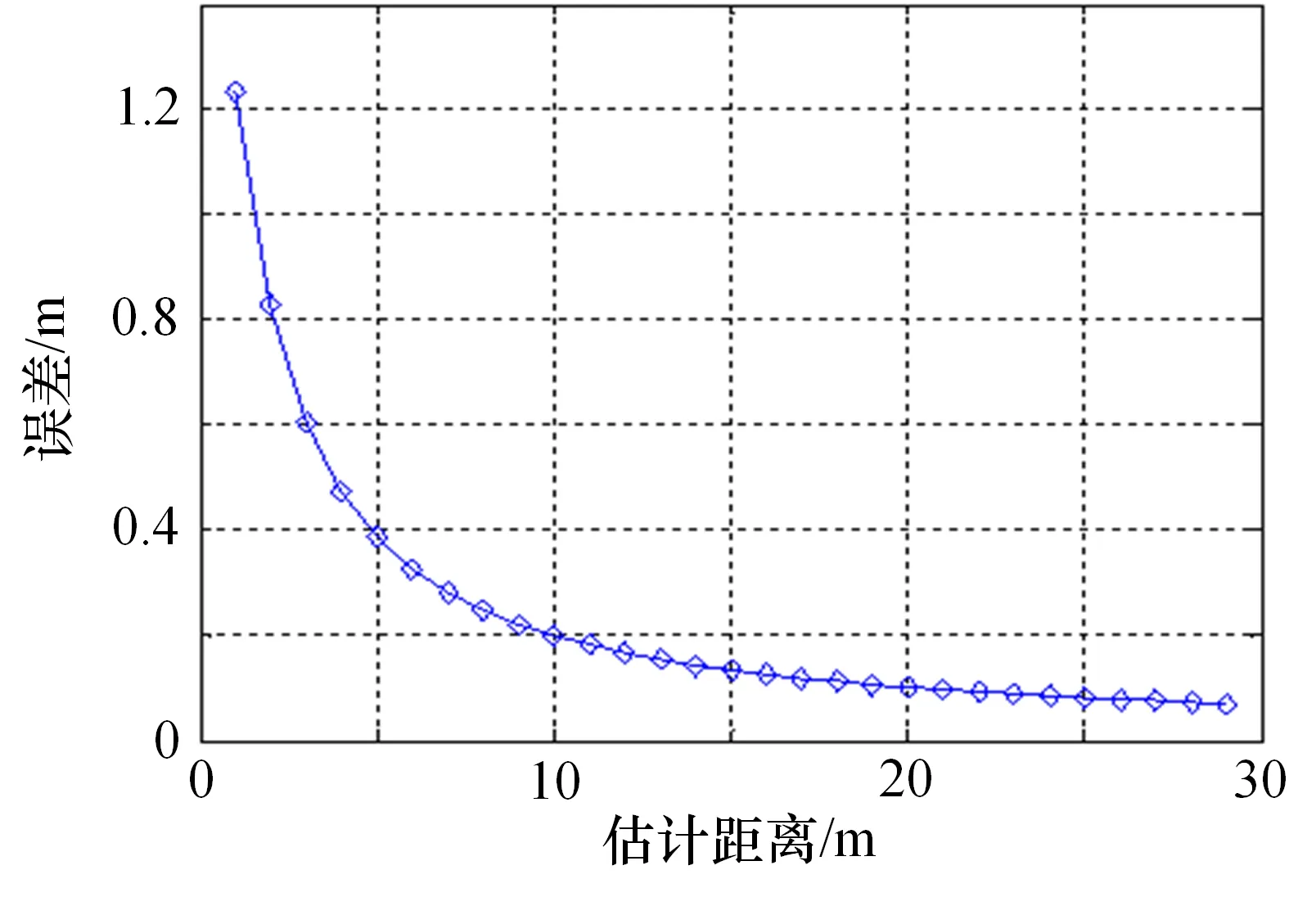
圖2 一維近似估計誤差
2.2 定位方法
假設某時刻目標節點發射的信號被若干個參考節點同時收到,為分析問題起見,下面以4個參考節點為例分析定位方法。
設參考節點i、j、k、l位置設置如圖3所示,為不失一般性,以參考節點i為參考原點,則參考節點j、k、l的坐標分別為d ji、d ki、d li。假設某時刻參考節點i、j、k、l都收到目標節點發送的信號能量信息,首先選擇其中最大的2個信號能量值對應的參考節點,認為目標節點位于該2參考節點之間(如圖3所示),假設第j和k參考節點所接收的信號能量值較大。

圖3 多節點定位示意圖
設參考節點j和k接收到的目標節點信號強度分別 為Psj和Psk,根 據 式(1)可 得P(d sj)=P(d0)+10αlg(d sj/d0)和P(d sk)=P(d0)+10αlg(d sk/d0),其中d sj和d sk分別為目標節點到參考節點j和k的距離。由此可得如下關系式:

根據(2)—(3)式可得:
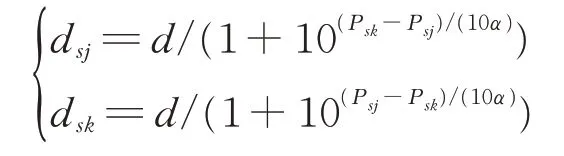
則可求得目標節點估計位置d′=d sj+d ij。
同理:
對于參考節點組合i和k,可求得目標節點估計位置d′′。
對于參考節點組合j和l,可求得目標節點估計位置d′′。
對以上所求得的d′、d′和d′′取幾何平均,即為目標節點的最終估計位置。
2.3 特殊情況處理
如果只有一個參考節點接收到目標信息,則認為該參考節點位置就是目標位置。如果只有2個參考節點接收到目標信息,如圖4所示,只有參考節點i,j接收到目標能量信息,假設2點之間距離為d,則認為目標節點s在i,j之間,且位于兩者連線上。
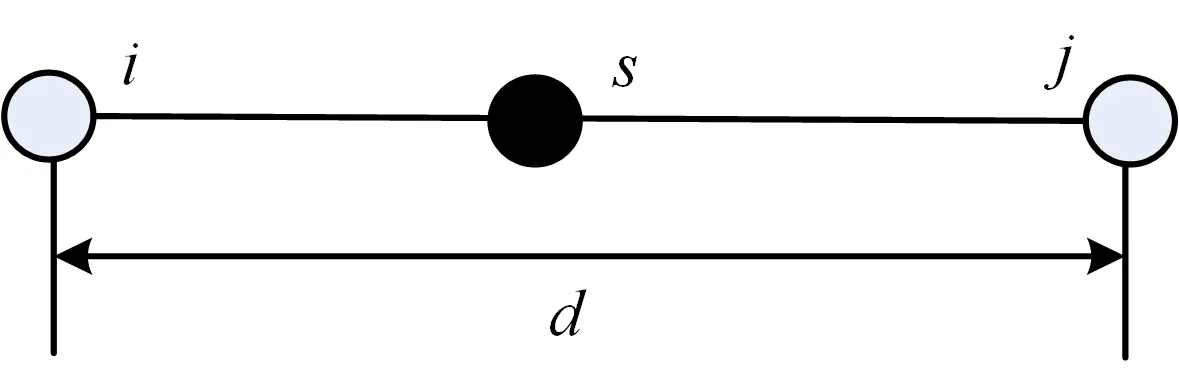
圖4 2節點定位示意圖
設參考節點i和j接收到的目標節點信號強度分別 為Pi和Pj,根 據 式(1)可 得P(d i)=P(d0)+10αlg(d i d0)和P(d j)=P(d0)+10αlg(d j d0),其中d i和d j分別為目標節點到參考節點i和j的距離。將兩式相減可得:

根據式(4)—(5)可得d i和d j的值:

即得到目標節點的位置信息。
2.4 定位誤差分析
當只有一個參考節點接收到目標節點信息時,此時無法估計出目標節點位置,但對于一維特殊場景,采用將該參考節點位置作為目標節點的估計位置方法,雖然定位誤差較大,但可作為初始的位置信息。
當只有2個參考節點接收到目標節點信息時,此種情形一般發生在巷道的終點處,如圖5所示。當只有參考節點i和j接收到目標節點s信息時,s的最大可能是處于節點i和j之間。如果估計位置處于s′處,則參考節點k也可能會接收到目標節點信息,與題設矛盾。
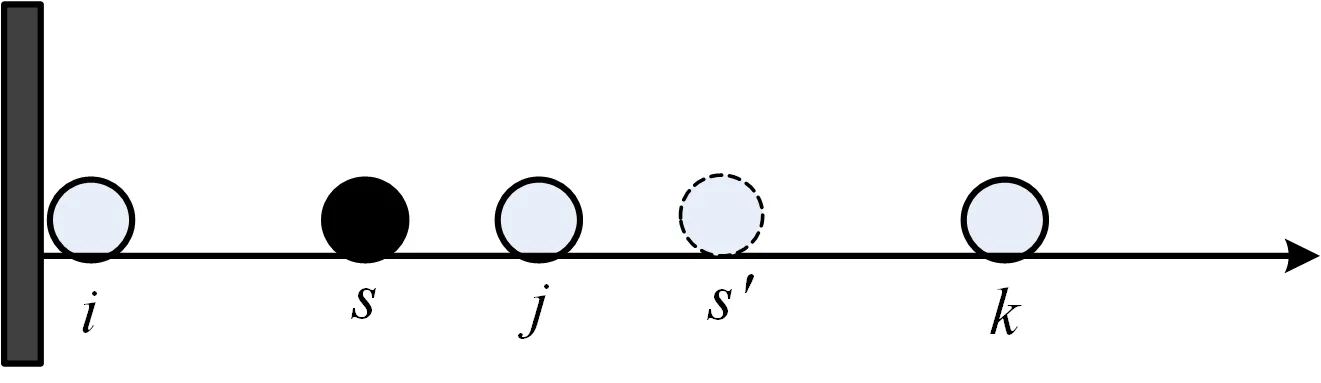
圖5 2節點定位誤差分析示意圖
當有多個參考節點接收到目標節點信息時,如圖6所示,假設參考節點間兩兩等距分布,距離為d。假設j和k參考節點所接收的信號能量值最大,目標節點位于s處,與參考節點j距離d′,如果誤判目標節點在位置s′處,與參考節點j同樣距離d′,分析此時的定位誤差情況。有如下關系式:
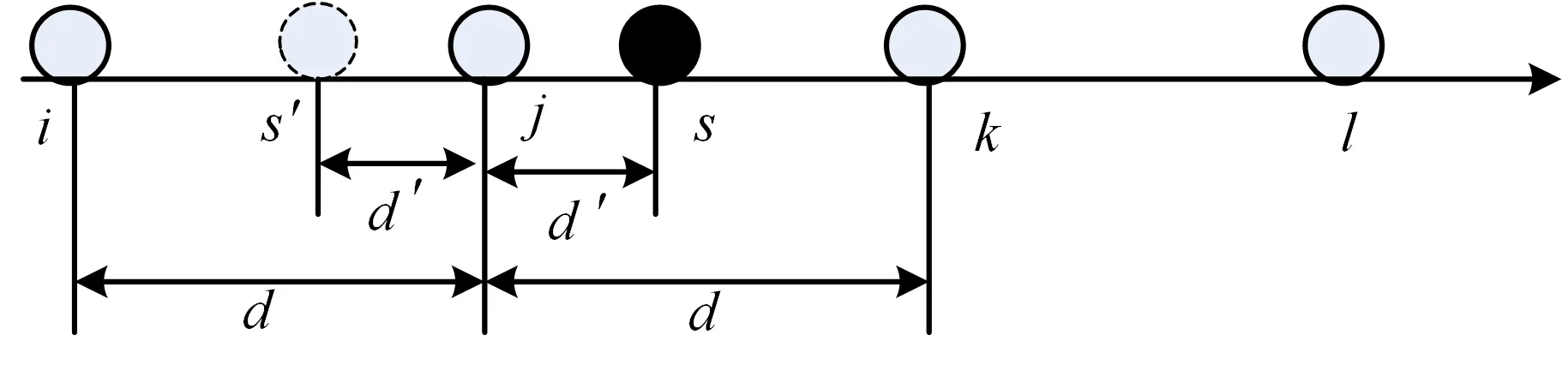
圖6 多節點定位誤差分析示意圖

根據上式可得關系:(d+d′)/(d?d′)=10(Pi?Pk)/(10α),此時有Pi>Pk,這與j和k參考節點所接收的信號能量值最大相矛盾,所以在初始估計階段認為目標節點位于j和k之間是合理的。
3 仿真性能分析
本節首先通過Matlab仿真實驗分析所提出定位方法的性能。假設有4個參考節點等間隔均勻分布在一條直線上,目標節點隨機分布在直線某點上。
圖7分析比較了直接根據RSSI值定位方法(RSSI方法)[7?8]和所提出基于能量差定位方法(DRSSI方法)的定位性能。可以看出隨著噪聲的增大,2種定位方法的誤差都有所增加,但DRSSI方法的定位性能明顯優于RSSI方法,穩健性也更強。
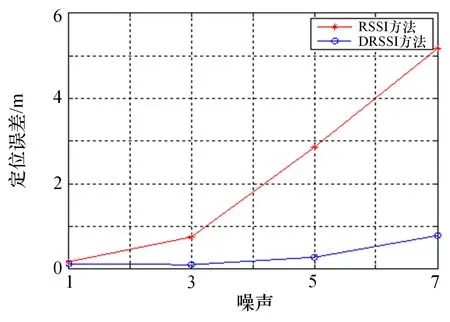
圖7 定位性能
通過所開發傳感器節點搭建的試驗平臺進行定位測試實驗來驗證系統的性能。通過室內走廊和防空洞進行了測試試驗,測試結果表明:在不存在遮擋的情況下,定位精度可以達到1 m,在有障礙物遮擋的情況下定位性能下降嚴重。設計了定位估計軟件,后臺工作人員通過監控服務器可實時監測目標節點位置信息,效果圖如圖8所示。
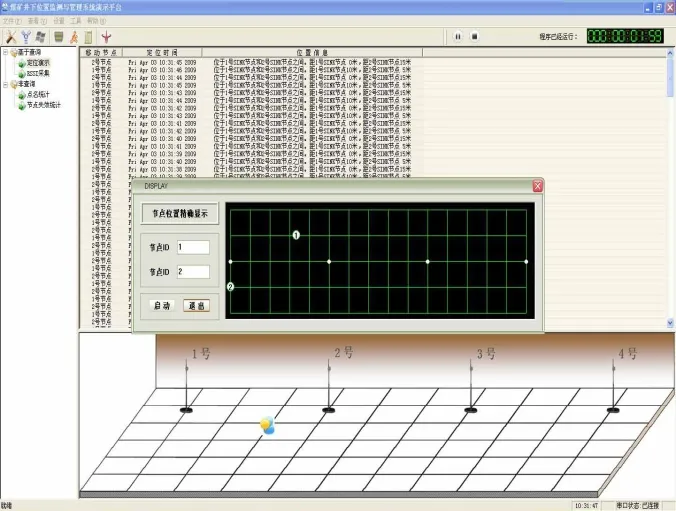
圖8 定位平臺示意圖
4 結束語
根據接收信號能量進行定位的方法由于實現簡單而受到廣泛關注。本文提出了一種基于能量差的一維定位方法,該方法考慮了一維定位特殊環境下參考節點與目標節點間的幾何約束關系,利用兩兩參考節點間的接收信號能量差信息來對目標節點進行定位,簡化了信號能量衰減模型,改善了定位性能。并通過仿真分析和測試試驗,驗證了該定位方法的有效性。■
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46