基于ROS的爬壁機器人控制系統設計*
2021-09-26 07:33:36楊東宇孫振國于傲然
機電工程技術 2021年8期
楊東宇,孫振國,,姜 萍,于傲然
(1. 清華大學天津高端裝備研究院, 天津 300304;2. 清華大學機械工程系, 北京 100084)
0 引言
球罐和大型加氫反應器等石油化工裝備都屬于特種設備,這類設備具有結構復雜、體積龐大、安全性能要求高等特點,使用過程中常用于存放化工產品和原料,通常需要承壓工作,存在較大安全隱患[1]。為保證設備的安全運行,國家標準規定在設備的制造和使用過程中,都需要對母材和焊縫進行探傷檢測,檢查其內部是否存在未焊透、未融合、裂紋、夾雜、氣孔等缺陷[2]。目前此類特種設備的探傷檢測都采用人工操作方式,其檢測流程復雜、危險性高且效率低下,特別是有些檢測現場還可能存在有害氣體污染,工作條件極其艱苦,屬于高危作業。
承壓設備常使用的檢測方式有射線檢測、超聲檢測、衍射時差法超聲檢測等,其中,超聲檢測和衍射時差法超聲檢測應用最廣泛,具有儀器成本較低,穿透能力強,檢出率高等特點[3]。在實際作業中,人工手持掃查器,將探頭貼合在受檢工件表面,在接觸面涂抹耦合液,保證探頭能夠良好接觸,緩慢移動探頭,同時觀察探傷儀屏幕顯示的檢測結果,判斷受檢工件是否存在缺陷,人工探傷作業如圖1所示。檢測過程中,需要同時兼顧多種操作,對操作人員要求較高,檢測效率低下。在操作人員進行仰面檢測、高空檢測等作業任務時,操作過程極易產生危險,造成不良后果[4]。

圖1 人工探傷作業
針對上述特種設備檢測中存在的諸多問題,亟需提高大型壓力容器無損檢測的自動化和智能檢測水平,研制替代操作人員的自動化檢測機器人。本研究設計了一款替代人工進行檢測作業的永磁爬壁探傷機器人,該永磁爬壁探傷機器人搭載探傷儀器,可有效降低探傷檢測的操作風險,提高檢測作業效率。
1 爬壁機器人總體結構
球罐和大型加氫反應器等特種設備一般為鋼制材料,具有導磁性,公稱厚度較大,且表面較為粗糙[4-6]。根據被測工件的特殊性,本設計選用永磁吸附式爬壁機器人作為載體,搭載探傷檢測設備,對工件進行無損探傷檢測作業[7]。
爬壁探傷機器人由移動平臺、掃查架、控制盒和永磁吸附體4 部分構成。移動平臺外形尺寸為300 mm×300 mm×200 mm,負載10 kg,采用2個驅動輪差動方式實現機器人運動,以及一個帶永磁吸附的萬向輪作為輔助支撐輪實現與工件的穩定接觸。3個永磁吸附體呈等邊三角形布置,具有較高穩定性,保證移動平臺不從工件上脫落、傾覆,保證驅動輪在運動時不發生打滑,以實現爬壁探傷機器人能夠在受檢工件上穩定安全作業。吸附體可根據工件的曲率半徑大小,通過螺母調節角度和高度,保證永磁吸附體可以與工件保持均勻氣隙,以提供可靠吸附力。爬壁機器人的控制盒采用背負方式,控制盒包含運動控制系統和探傷檢測儀器。安裝超聲探頭的掃查器安裝在機器人的前端,隨著機器人在受檢工件上移動,探頭可以不斷采集受檢工件探傷數據。爬壁探傷機器人的結構如圖2所示。
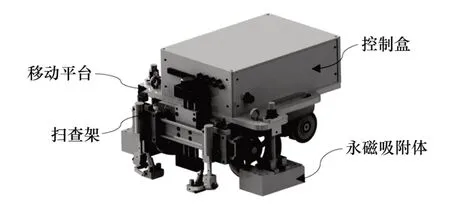
圖2 爬壁探傷機器人
為實現對特種設備的自動檢測,爬壁機器人控制系統是關鍵所在。本設計根據爬壁探傷機器人所要達到的要求,著重介紹爬壁機器人的控制系統。
2 爬壁機器人硬件設計
爬壁機器人控制系統可以分為機器人控制單元和操作臺單元兩部分。其中機器人控制單元為下位機,負責控制機器人的運動控制和探傷信號采集,選用開源硬件BeagleBone Black嵌入式單板計算機作為主控制器,通過UART 端口將運動參數傳遞給電機驅動器,控制伺服電機旋轉,進而驅動機器人運動,通過IO 口控制超聲板卡拾取探傷數據,通過USB讀取攝像頭獲取到的周圍環境圖像。
BeagleBone Black 是德州儀器開發的一套基于ARMCor?tex-A8 的低成本的AM335X 開源硬件,采用工業級的MPU,在圖像、圖形處理、外設和諸如EtherCAT 和PROFIBUS 的工業接口方面進行了增強,主頻高達1 GHz,相比于市面上主流的微處理器,主頻高、性能優良、接口豐富,便于維護升級[8]。
操作臺單元采用嵌入式工控機GK3000作為上位機,工業搖桿作為爬壁機器人運動信號的輸入端,顯示屏用來顯示人機交互界面,實時反饋探傷數據和運動參數。工控機GK3000搭載Intel酷睿i3處理器,2 G內存,60 G固態硬盤,具有豐富的外圍擴展接口,采用無風扇設計,功耗低、運行穩定性高、體積小巧、重量輕,便于工程現場使用。操作臺配備計量泵,用于給探頭供給耦合液,使探頭與受檢工件可以良好接觸,以保證機器人能夠穩定拾取探傷數據。
為了實現機器人控制信號穩定、有效地傳遞,機器人控制單元與操作臺單元通過有線局域網傳遞信號,機器人攜帶拖纜。爬壁機器人控制系統硬件組成如圖3所示。

圖3 控制系統硬件組成
3 爬壁機器人軟件設計
開源機器人操作系統(ROS)是面向機器人的開源后操作系統,提供了類似傳統操作系統的功能,如底層設備控制、進程間消息傳遞和程序包管理等,還提供了相關開發工具和庫,方便獲取、編譯代碼,以及在多個控制器之間運行程序進行分布式計算[9-10]。
ROS 本質上是一種分布式機器人軟件框架,采用當前流行的面向服務的軟件技術,通過網絡協議將節點(node)間數據通信結構,以便輕松集成不同功能的代碼,節點封裝在數據包中,從而使在不同的機器人上無需做過多改動就能重用成熟代碼,具有點對點設計、精簡、集成和開源的特點[11-12]。
在主控制器BeagleBone Black 和工控機上均安裝LinuxU?buntu操作系統和Kinetic版本的ROS機器人操作系統。在Bea?gleBone Black 和工控機上運行不同的控制節點node,機器人節點結構如圖4 所示,不同節點間通過UDP 通信方式實現雙機數據交換。控制過程分為手動模式和自動模式兩種模式。
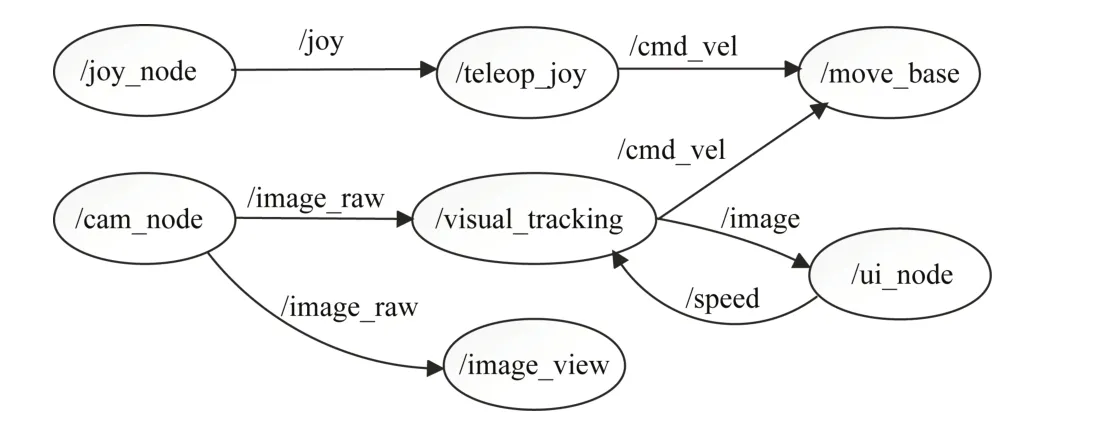
圖4 機器人節點結構
手動控制模式時,搖桿控制節點(joy_node)采集到搖桿按鍵和軸的數據信息,并向teleop_joy 節點發布主題。經由teleop_joy 節點將輸入的數據信息轉換成機器人的運動信息。move_base 節點訂閱teleop_joy 節點發布的機器人的運動信息,進一步轉化成電機驅動器的控制指令,控制驅動電機的轉向和速度,進而控制機器人運動。
自動控制模式時,通過攝像頭節點(cam_node)提取采集的圖像數據信息,利用ROS 平臺下的cv_bridge功能包可以將圖像數據進行轉化,通過image_view 節點進行顯示。同時visual_tracking節點訂閱cam_node發布的圖像數據信息,計算出電機的運動參數,再由move_base節點將運動參數轉化成電機驅動器的控制指令,驅動機器人運動。操作人員在人機交互界面設置的運動速度等參數,通過ui_node節點發布給visu?al_tracking節點,經進一步處理后,控制機器人運動。
針對檢測作業任務的具體需求, 和國家標準NBT 47013.10-2015 承壓設備無損檢測——衍射時差法超聲檢測,設計出爬壁探傷機器人控制系統人機交互界面,人機交互界面如圖5 所示。界面左側上部分顯示A-Scan 波形,左側下部分顯示D-Scan圖像,右側上部分為探傷參數的設置區域,右側下部分為攝像頭采集的圖像信息和跟蹤焊縫的情況。探傷操作人員根據工件實際情況設置探傷參數,然后根據實時反饋的A-Scan波形和D-Scan圖像判斷工件是否存在內部缺陷。
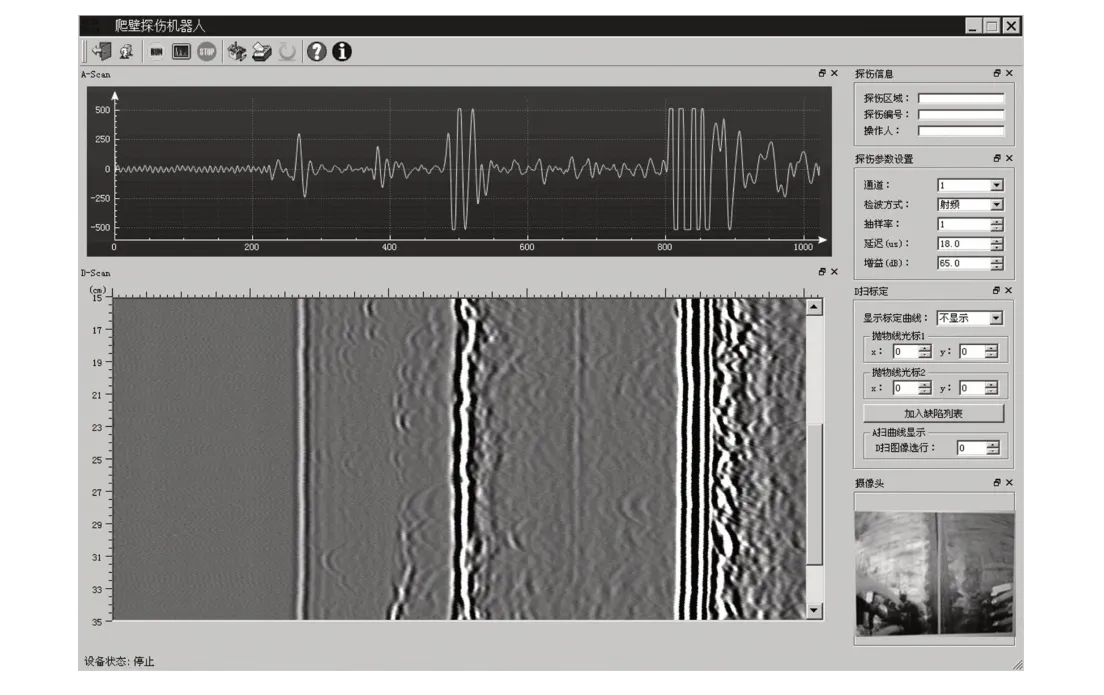
圖5 人機交互界面
4 試驗與分析
為驗證爬壁機器人的技術可行性,在曲率半徑為8.5 m,厚度為20 mm,材料為Q345R 的球殼板上進行了機器人全位置作業和曲面自適應性能測試,測試內容包括機器人平動、轉向、焊縫跟蹤等,受檢工件參數如表1所示,爬壁機器人現場試驗如圖6所示。全位置作業測試結果表明,研制的爬壁機器人不僅能夠穩定可靠吸附于工件曲面進行焊縫探傷作業,未出現傾覆、脫落、滑移等現象,而且能夠良好適應曲面曲率變化并靈活運動,證明了該爬壁機器人技術的可行性和較好的工程應用前景。
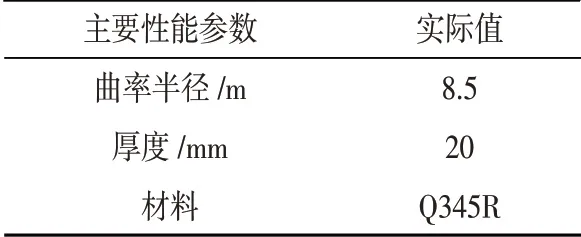
表1 受檢工件參數
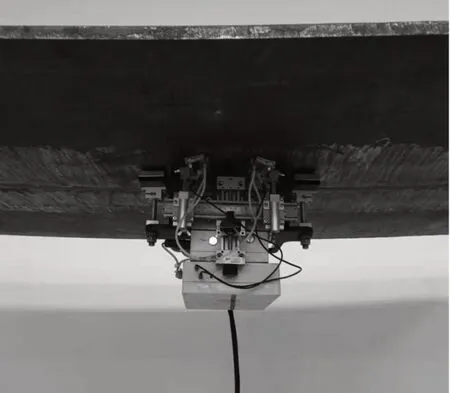
圖6 爬壁機器人現場試驗
5 結束語
本研究利用開源機器人操作系統(ROS)設計了一種永磁吸附式爬壁探傷機器人控制系統方案,詳細闡述了軟硬件的設計細節與實現方式。機器人使用嵌入式開源硬件Beagle?Bone Black作為開發平臺,同時將嵌入式系統融入其中,具有低成本、高性能、易擴展等特點。分析結果表明:
(1)提出并研制了一種爬壁探傷機器人,通過持載相應檢測儀器,能夠在大曲率的壓力容器曲面上完成探傷檢測等作業任務;
(2)在吸附力可保證機器人全位置作業的條件下,掃查結構具有良好的曲面自適應能力;
(3)在球殼板上進行了焊縫探傷實驗,證明了本文提出的爬壁探傷機器人的技術可行性和工程實用性。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12