基于肌張力反饋的深層肌肉刺激儀控制系統設計
2021-09-26 07:33:36宮迎嬌張元良
機電工程技術 2021年8期
關鍵詞:單片機
宮迎嬌,張元良,孫 源
(大連理工大學機械工程學院, 遼寧大連 116024)
0 引言
深層肌肉刺激儀主要通過機械振動作用于人體肌肉組織,達到減少筋膜粘連、緩解疼痛、減少乳酸堆積等效果,目前在康復治療、運動損傷治療以及神經性疾病的輔助治療中都有著廣泛的應用[1]。肌肉刺激儀出現之初,振動頻率較為固定,治療范圍也僅限于運動造成的肌肉損傷康復,功能較為單一。隨著技術的進步,深層肌肉刺激儀也漸漸得到了發展,例如,出現了可以通過控制頻率來調節刺激深度的肌肉刺激儀、多路振動治療儀等新型儀器。深層肌肉刺激儀的功能得到豐富,穩定性及智能化程度也都得到提升。
隨著深層肌肉刺激儀應用范圍的拓展,醫療界對其智能化的需求也逐漸增加。通過分析市面上現有的同類儀器發現,其控制方式往往由醫護人員憑借經驗手動控制,缺少適當的反饋控制。若在控制系統中加入合理的參考量作為反饋,深層肌肉刺激儀的智能化程度將得到大幅度的提升。
肌張力(Muscle Tone)是指肌肉松弛狀態下的緊張度和被動運動時遇到的阻力。肌張力的大小可以表征多種神經性疾病,例如脊髓前角灰質炎、小腦病變、腦卒中等[2]。本文在深層肌肉刺激儀控制系統中加入肌張力檢測環節,并通過測得的數值對當前治療效果進行反饋,可以使儀器功能得到豐富,大大提升儀器的治療效果。
1 系統總體設計
肌張力大小反映了肌肉靜止時的緊張程度或運動時的牽引力。肌張力又分為靜止性肌張力、姿勢性肌張力和運動性肌張力。例如人在放松臥床休息時,肌肉之間的張力成為靜止性肌張力,維持站立姿勢時,需要靠肌肉維持身體穩定;此時肌肉的張力成為姿勢性肌張力;人在走路或其他運動時,肌肉為保持運動過程連續、平滑而提供的張力成為運動性肌張力[2]。
肌張力的大小可作為許多肌源性疾病或神經性疾病的表征。醫學研究顯示,例如進行性肌營養不良癥(Progressive Muscular Dystrophy)、多發性肌炎(Polymyositis, PM)、單神經病(Mononeruopathy)、肌萎縮性側索硬化(Amgotrophic Lateral Sclerosis)等疾病和都會導致肌張力減低。而Parkinson病、Huntington 舞蹈病、變形性肌張力障礙(Dystonia Muscu?lorumdefoumans)等疾病都會導致肌張力增高[3-5]。深層肌肉刺激儀在類似于上述肌源性疾病或神經性疾病的治療或輔助治療過程中應用非常廣泛,因此,將肌張力反饋環節加入深層肌肉刺激儀控制系統中,能夠讓儀器實用性更強,使用更加方便[6]。根據肌張力大小來調節刺激頻率,可大大節省人工成本,提高儀器的治療效率,使儀器更加智能化、人性化[7-9]。
系統選用功能豐富強大的STM32 單片機為核心控制器,該單片機運算能力強大,可滿足系統控制需求。系統選用57BL06型無刷直流電機,由電機通過軟軸帶動凸輪的方式產生振動,以實現對深層肌肉進行振動治療的功能。電機采用三相全橋驅動方式,并利用正弦波調制(SPWM)的方式實現對其轉矩、轉速的控制。系統主要分為單片機模塊、電機控制模塊、人機交互模塊、肌張力采集模塊、報警指示模塊、調試接口以及電源模塊組成。控制系統框圖如圖1所示。
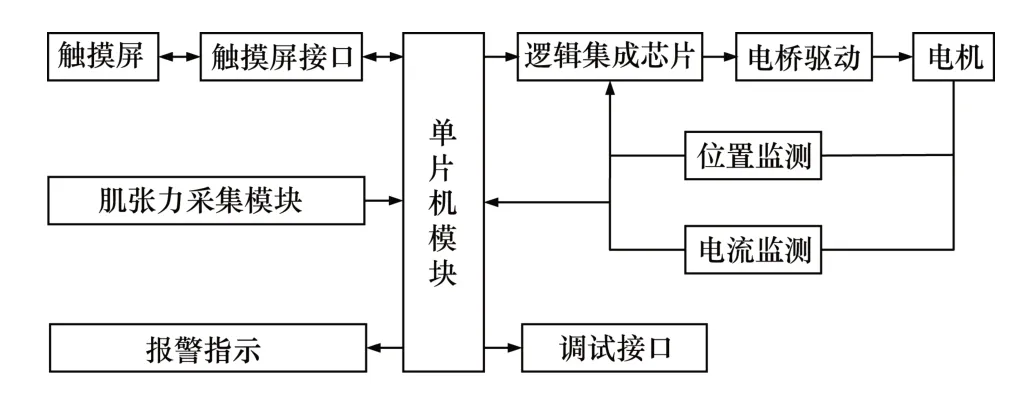
圖1 深層肌肉刺激儀控制系統
直流無刷電機通過電橋驅動,并由驅動控制IC 進行控制。為保證電機運行的穩定性,采用速度環與電流環雙閉環控制的控制方法,因此需要位置監測和電流監測電路,并將位置信息及電流信息分別傳輸至驅動控制IC 和STM32 單片機,對電機的運行進行控制。為方便使用,人機交互模塊采用觸摸屏,通過接口電路將其與單片機相連,實現數據顯示以及指令的采集。肌張力采集模塊主要由肌張力傳感器以及濾波、放大電路組成。此外,系統還需要蜂鳴器報警電路對異常情況進行報警,指示燈進行上電指示,以及相應的調試接口進行程序燒錄等。
通過查詢上述各模塊需要的供電電壓,設計深層肌肉刺激儀控制系統的供電方案如圖2所示。
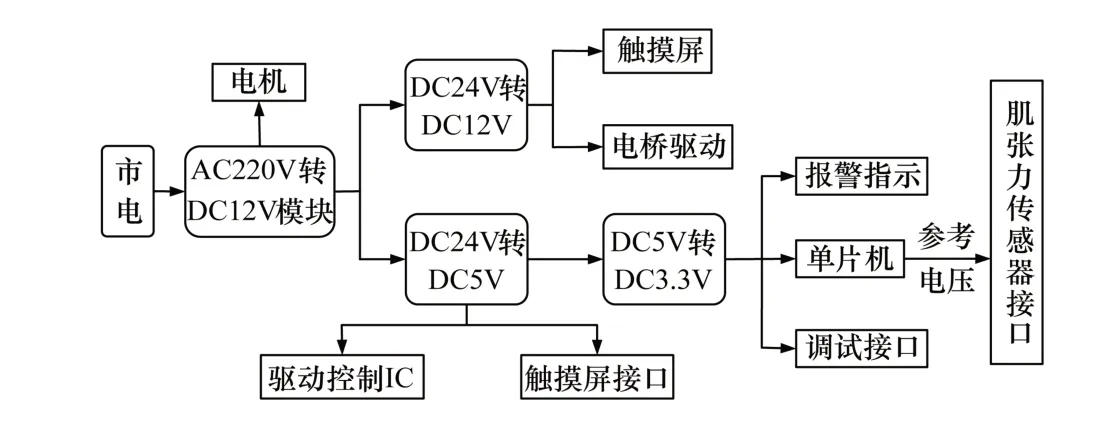
圖2 深層肌肉刺激儀控制系統供電方案
首先,由AC220 V 轉DC24 V 模塊將220 V 交流市電轉換為24 V直流電,并為無刷直流電機供電;再分別設計24 V轉12 V以及24 V轉5 V電路將24 V直流電分兩路轉換為12 V和5 V直流電,其中12 V直流電為屏幕和電橋驅動電路供電,5 V直流電為驅動控制IC 及觸摸屏接口電路供電;最后由5 V 轉3.3 V 電路得到3.3 V 直流電,為STM32 單片機以及其外圍的報警指示電路、調試接口電路供電。
2 系統主要模塊硬件電路設計
2.1 單片機基準電源
單片機模塊電路主要為單片機最小系統,包括電源電路、晶振電路以及復位電路。此外,由于系統中肌張力檢測模塊應用了STM32內部的ADC模塊,故還需要增加基準電源電路,為ADC提供模數轉換時所需的參考電壓。單片機基準電源模塊電路如圖3所示。
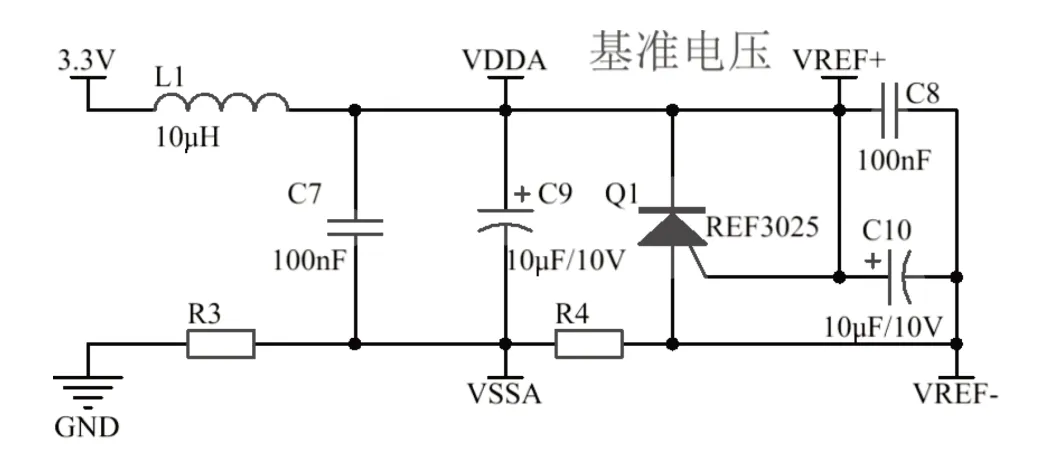
圖3 單片機基準電源模塊電路
該電路的核心元件REF3025 是一種電壓基準芯片,其主要功能為:在電壓輸入端輸入2.501~5.5 V 電壓,電壓輸出端將輸出恒定的2.5 V電壓,從而為單片機中的ADC提供參考電壓。RLC 部分電路的主要作用為隔離、濾波和緩沖,C7、C8主要用于濾除高頻干擾信號,鉭電容C9、C10 的作用是濾除低頻干擾信號。
2.2 電機控制模塊
電機控制模塊主要包括驅動控制IC電路和電橋驅動電路兩大部分,其中驅動控制IC部分還應考慮電流監測和位置監測電路。
選用無刷直流電機專用給的驅動控制芯片JY01 進行控制,該芯片的作用為接收電機內置的霍爾傳感器采集的轉子位置信息,經過運算處理后輸出換向信息,使電機連續運轉,同時將運算獲得的電機轉速信息傳遞給單片機外部中斷引腳,實現電機的速度閉環控制。該芯片還負責采集電機母線電流信息,起到保護電路的作用,實現電流閉環控制。驅動控制IC電路如圖4所示。
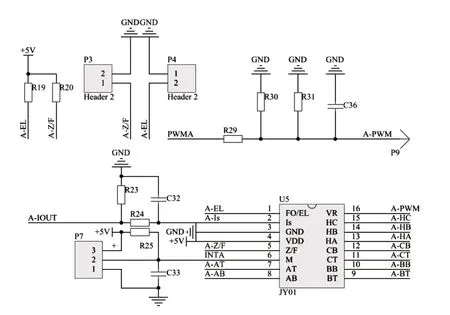
圖4 驅動控制IC電路
驅動控制芯片通過控制逆變器實現電機定子的換向。系統采用三相全橋的驅動方式,選用IR2101 芯片作為驅動芯片,由該芯片同時驅動兩個IRF540 型號的N 型MOSFET 功率管,實現對電機的驅動。IR2101 芯片采用自舉的方式驅動橋臂上的MOSFET管,采用SS16型肖特基二極管(D9)作為自舉二極管,C38是自舉電容,為1 μF的高質量鉭電容。圖5所示為IR2101驅動電路。
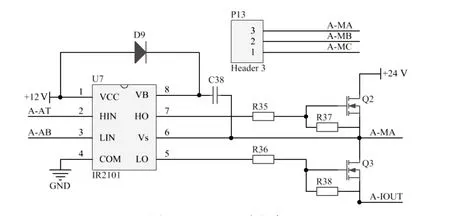
圖5 IR2101驅動電路
2.3 肌張力傳感器接口電路
肌張力傳感器為橋路輸出,產生的信號較為微弱,需要經放大電路放大到與單片機匹配的電壓后才能傳輸到單片機進行處理。圖6所示為肌張力傳感器接口電路。LM358為運算放大器,為了防止單級放大倍數過高帶來的非線性誤差,放大電路采用兩級放大,前一級放大倍數約為10倍,后一級約為3倍。從電橋獲取的差分信號通過放大電路后輸入單片機內置12位ADC的輸入引腳。肌張力傳感器接口由單片機提供的參考電壓供電。
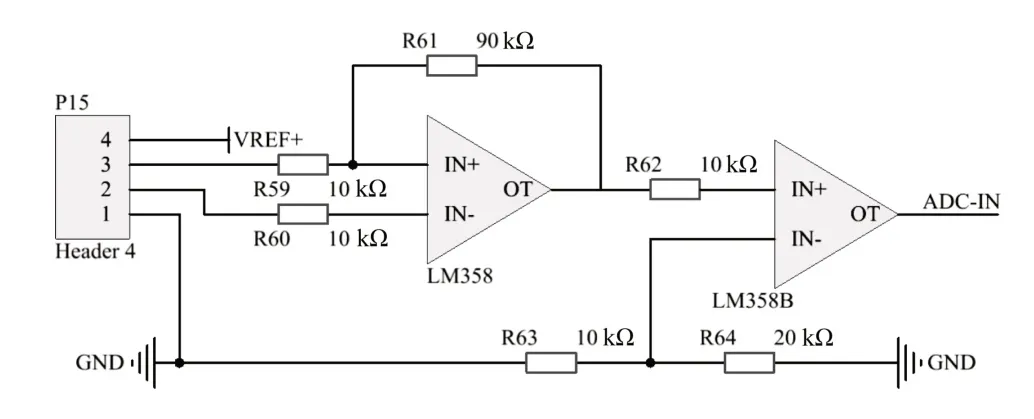
圖6 肌張力傳感器接口電路
2.4 電源模塊
根據前述供電方案,設計電源模塊電路如圖7所示。
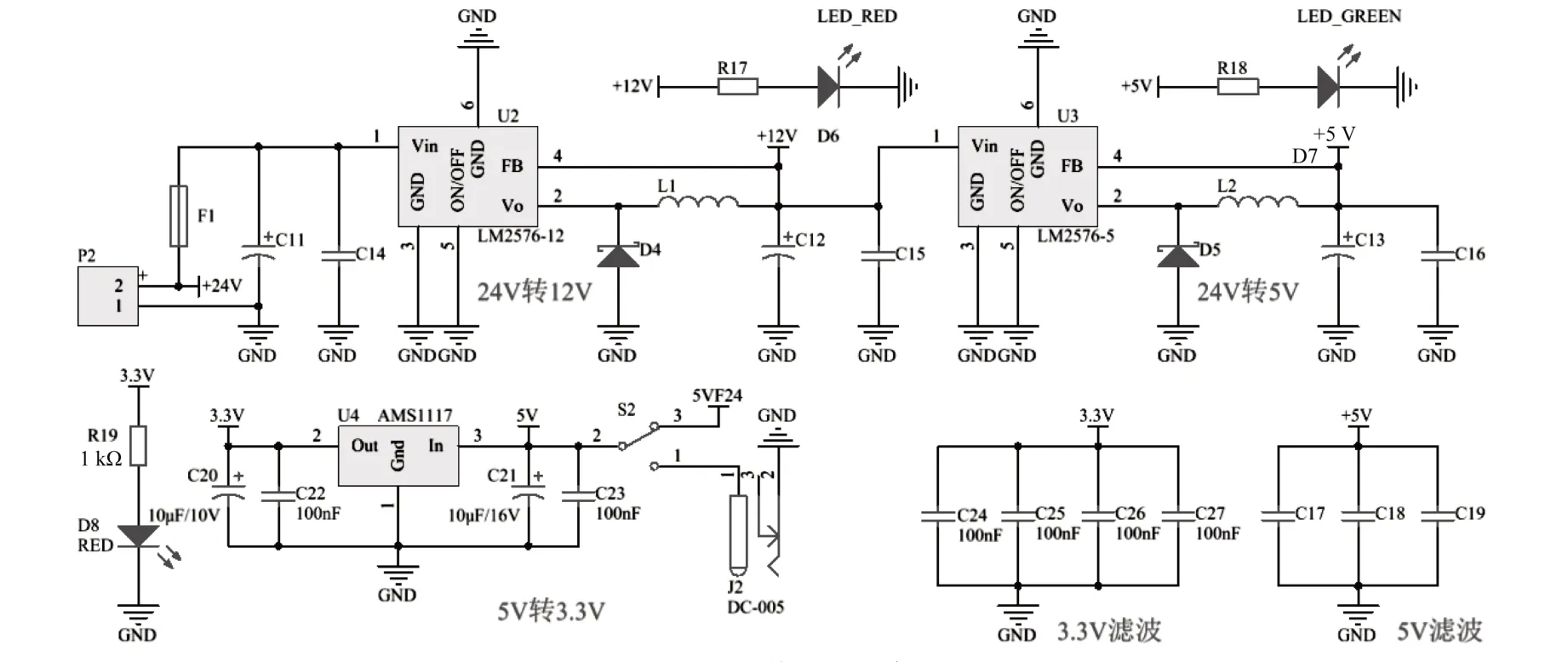
圖7 系統電源電路
分 別 選 用LM2576-12 和LM2576-5 作 為DC24 V 轉DC12 V、DC24 V轉DC5 V轉換芯片。AC220 V市電轉DC24 V模塊為外購件,故在原理圖中不做表示。選用AMS1117 芯片為DC5 V轉DC3.3 V轉換芯片,單片機及驅動控制芯片等需要較為穩定的供電電壓,故需要對5 V 和3.3 V 電壓進行濾波處理。多個電容并聯可得到更好的濾波效果。
3 系統軟件設計
為實現對深層肌肉刺激儀的合理控制,引入了實時操作系統。μC/OS-Ⅱ是一種常用的嵌入式實時操作系統,同時,μC/OS-Ⅱ為開源操作系統,方便在各開發平臺上的移植。參考官方移植說明,將系統底層代碼進行移植,根據不同的硬件模塊,對相應的控制任務進行劃分,并編寫相應的用戶代碼。用戶代碼則根據控制需求將系統劃分為多個任務,系統軟件框圖如圖8所示[10]。
系統調試任務主要應用于系統調試階段,通過單片機串口與PC機通訊,完成程序燒錄等功能。參數存取任務主要為參數在單片機EEPROM 中的寫入和讀取,系統啟動時,從EEPROM 中讀取參數,運行過程中則通過該任務將需要保存的參數寫入EEPROM。蜂鳴器報警任務為通過單片機I/O口設置蜂鳴器,使其報警,主要用于系統故障、違規操作等情景下對操作人員的提示。觸摸屏任務主要為單片機通過串行口于觸摸屏進行數據通訊,將當前運行數據寫入觸摸屏,并從觸摸屏中讀取控制信息,對電機進行下一步調節。肌張力檢測任務是通過傳感器對肌張力進行采集,開啟單片機ADC通道進行模數轉換,并將轉換得到的肌張力參數值用于電機調速任務。電機電流監測任務為對電機母線電流的監測,電流達到上限值時限制電機轉速使其不再增加,實現過流保護。電機速度監測任務是單片機通過霍爾傳感器測得的位置信息計算出轉子實際轉速,用于電機速度調節。電機調速任務為單片機運用PID 算法,根據肌張力值、電流值、當前電機轉速以及設定轉速計算輸出控制量,使電機根據要求進行加速、減速或保持當前速度運轉。
μC/OS-Ⅱ操作系統采用按優先級搶占式規則進行任務管理與調度。進行任務劃分時,需要設定各個任務的優先級。μC/OS-Ⅱ操作系統最多可創建64 個任務,故最多有64 個優先級。優先級用0~63 中的整數表示,數值越小,優先級越高。對于用戶任務而言,對實時性要求較高的任務應分配較高優先級。以上任務中,因系統調試任務只在調試階段燒寫程序時使用,故對實時性要求最低;參數存取任務和蜂鳴器報警任務對實時性要求也都較低;觸摸屏任務需要進行數據進行命令解析,對實時性要求中等;由于電機調速任務需要肌張力信號、電流信號以及當前電機轉速信號,故肌張力檢測任務、電機電流監測任務、電機速度監測任務都要在電機調速任務之前運行。各個任務優先級劃分如表1所示。

圖8 系統軟件框圖
4 結束語
本文將肌張力反饋引入深層肌肉刺激儀控制系統,豐富了現有儀器的使用功能,提高了儀器的智能化程度和使用效率,使深層肌肉刺激儀控制系統進一步完善。系統使用的STM32 系列單片機功能強大,引腳豐富,使深層肌肉刺激儀有良好的可擴展性。采用μC/OS-Ⅱ操作系統,可實現控制任務間的靈活調度,保證電機對調節信息的快速響應,實現系統的穩定輸出,保證系統穩定性和安全性。本系統具有良好的應用和發展前景。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36