基于公交車右轉內輪差效應的范圍研究
2021-09-27 05:31:20李英帥閆琦若
重慶交通大學學報(自然科學版) 2021年9期
李英帥,閆琦若,趙 聰
(1. 南京工業大學 交通運輸工程學院,江蘇 南京 211816; 2. 河海大學 土木與交通學院,江蘇 南京 210098)
0 引 言
日常交通出行中,由于車輛轉彎時產生的內輪差效應,當車輛在交叉口處右轉彎時,車輛會逐步 “貼近”右側非機動車及行人。內輪差效應是指車輛在交叉口轉彎時,內前輪與內后輪的轉彎半徑不同而形成的不同時刻軌跡差值。2019年公安部交管局統計數據顯示[1]:全國十大高風險旅客運輸企業中違法車輛均占比90%以上,客貨運輸車輛肇事多發,企業安全主體責任不落實問題突出。此外,發生在城市道路事故導致的死亡人數同比上升4.8%,其中大型車輛內輪差導致的交通事故約占總事故數的30%[2]。由于人們對內輪差效應不了解導致事故頻發,且車輛右轉時,駕駛員要不斷篩選關鍵信息[3],內輪差效應影響區域又為駕駛員視覺盲區,車輛駕駛員無法對已發生的事故及時做出反應,致使事故死亡率極高。
鑒于此,國內外學者對內輪差效應展開了研究。研究大致分為3個階段:
1)由于交叉口處車輛轉彎引發的事故層出不窮,李鐵洪等[4]開始對此類問題進行思考,并發現內輪差效應,且根據實際經驗總結出車輛軸距越大,轉向角度越大時,內輪差越大的結論;
2)學者們通過對車輛在交叉口處右轉彎情況的不同假設,建立出不同的幾何模型。模型建立又經過了從理想到實際的3個層次:①假設在理想情況下車輛內前輪與內后輪均做勻速圓周運動,基于該理想情況下,D.HASHIDA[5]模擬出車輛的行駛軌跡;錢紅波等[6]對不同車輛行駛數據進行分析,研究出其轉彎時最大內輪差的情況;②研究者逐漸發現車輛在交叉口處轉向并非做勻速圓周運動。李宗烜[7]對大型車側向安全距離模型進行數理分析,對構建的數據庫進行了修正;徐令選[8]通過阿克曼理論和現場實車試驗驗證,建立軌跡盲區面積模型,對不同車型進行仿真軌跡以及面積計算;③內輪差效應研究階段的逐步遞進并且逐步貼近實際情況,P.PITCHIPOO等[9]提出優化車輛后視鏡中使用的設計參數從而克服盲區問題,并用模糊層次分析法對設計參數進行排序。
3)學者們在已經有足夠的規劃策略、模型結構、內輪差公式的基礎上,選擇自己認為最合適的模型,設計出具體成果來幫助駕駛員、非機動車與行人有效避免交通事故。K.YAMADA[10]通過在車輛方向盤中安裝角度測量裝置,利用車內系統的主控裝置獲取車輛右轉時角度信息并帶入預先存儲的內輪差模型。通過激光投射裝置、主動探測裝置、聲光報警設備將模型計算出的危險區域進行警示。CHEN Peng 等[11]在對大量數據進行分析的基礎上,建立轉彎車輛軌跡,再現了不同幾何布局和運行條件下車輛轉彎行為;全威等[12]提出一種基于多軸慣性傳感器的方向盤轉角檢測系統,實現了對常見的駕駛行為的實車、實時輔助判別。
此外,對于內輪差問題的解決對策,多數學者都從駕駛員角度進行分析。如王清洲等[13]研究半掛汽車右轉彎后視鏡失效現象,提出增設后視鏡保證駕駛員視野的方案;J.JIN等[14]分析大型車輛駕駛員在右轉時視線變化情況,通過分析視線受限情況,為駕駛員提供車輛轉彎有效方案,增進駕駛員可見性與行人車輛沖突間關系的理解。
以往國內外學者研究對象多是針對小汽車,貨車或者帶鉸鏈的車型,很少有對于公交車這種車軸長,無鉸鏈的具有代表性車輛的研究,并且對交叉口幾何特征以及駕駛員因素考慮不足。筆者以南京市公交車為研究對象,實地調研不同公交車駕駛員在交叉口右轉時的駕駛行為,將右轉行為分為3類,并分別建立內輪差模型,以此作為城市交叉口內輪差效應產生的禁停區域范圍的施劃依據。
1 研究思路
1.1 基本原則
研究公交車內輪差效應時,遵循以下原則:
1)將公交車視為剛體。公交車前輪速度方向沿前輪的偏向方向,公交車后輪速度方向始終沿著前后輪的連線方向。
2)理想狀態下模型的基本假設。轉彎時車輛速度較慢且無側滑,且內、外前輪的轉角不變。
3)轉向傳動比。車輛在實施轉向操作時,方向盤的轉動度數與內前輪轉角度數的比值(據此將方向盤的轉動與車輛的實際轉向情況聯系起來)。
1.2 建模依據
對南京市某一常規公交車車型參數進行調研,車型各項參數為:車輛軸距L=5.9 m、車輛輪距D=2.1 m、車輛最大轉彎角度Z=30°。
公交車在右轉時,內輪差效應與交叉口類型、駕駛員轉動方向盤習慣均有關,對南京市公交車駕駛員在無右轉專用車道的交叉口轉向情況進行實地調研。通過調研,可以將南京市公交車駕駛員右轉行為分為3類,并以此進行建模:
模型一:駕駛員根據經驗將方向盤打到適宜的位置(半圈左右),且在整個轉向過程中基本不調整方向盤,即將完成轉向時進行回正。
模型二:駕駛員在轉向過程中往往不能做到第一時間就將方向盤打滿,而要經過2~3個階段,即兩手操作過程中存在停頓,不連續。
模型三:駕駛員在轉向開始時就逐漸將方向盤打滿(一圈半左右),然后在轉向完成1/2~2/3時進行連續性的回正,且在公交車剛好完成整個轉向操作時,方向盤回到初始位置。
2 模型構建
2.1 模型一
通過結合車輛軸距、車輛最大轉彎角度、車輛輪距,由余弦公式計算公交車最小轉彎半徑Rf/m。
(1)
帶入數據得公交車最小轉彎半徑Rf=12.88 m,則可由式(2)計算可得公交車內前輪最大轉角β/(°),過程如圖1。
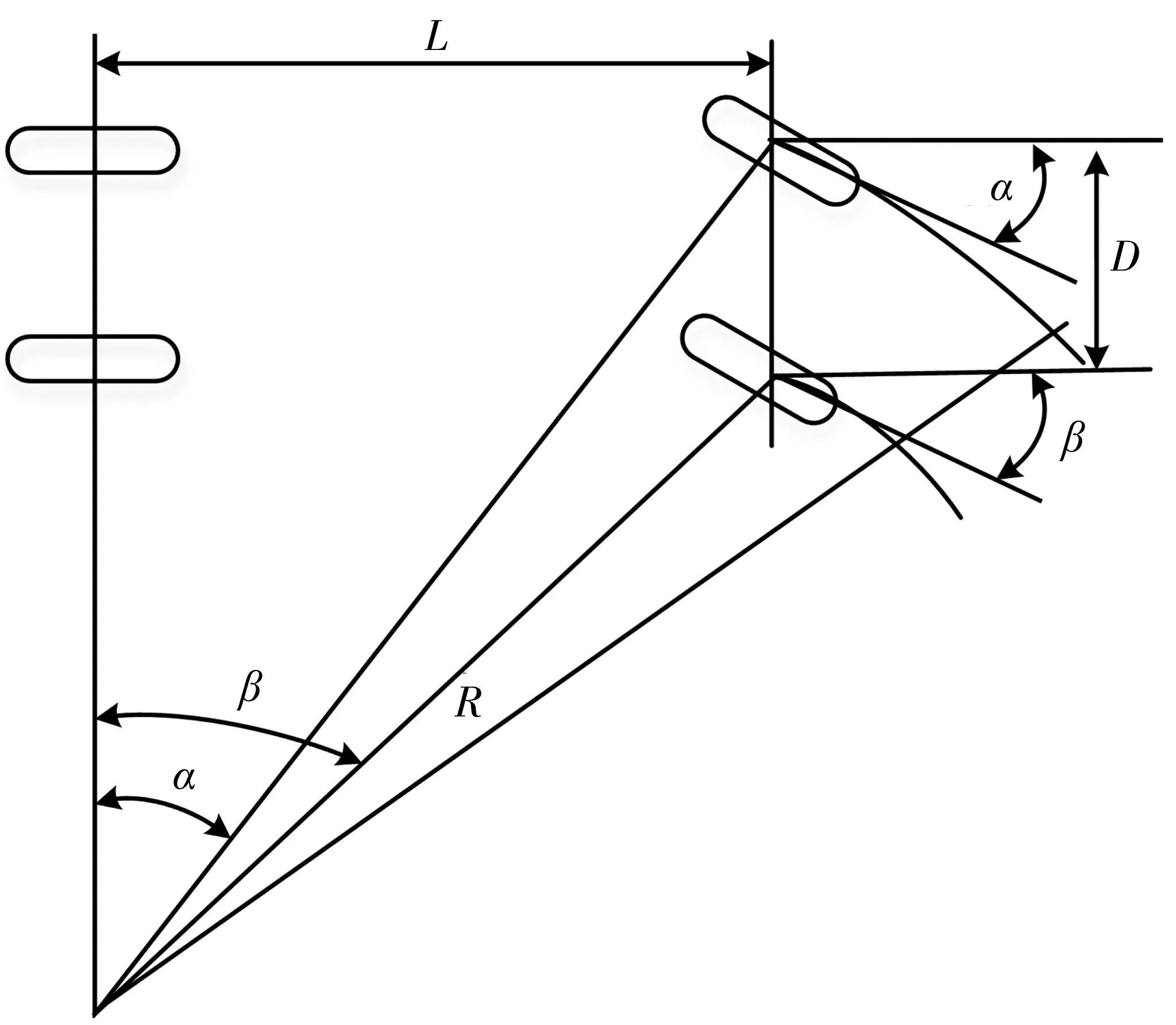
圖1 雙軸汽車轉向時兩側轉向輪偏向角Fig. 1 Deflection angle of the steering wheels on both sides of thetwo-axle car
cotα=cotβ+D/L
(2)
Rf=L/sinβ
(3)
式中:α為車輛右轉時外前輪最大轉角,β為車輛轉彎時內前輪最大轉角。通過式(2)可得到內前輪轉角與外前輪轉角之間的關系,消除前后輪并非都是做圓周運動而產生的誤差。
駕駛員將方向盤打滿時方向盤轉動一圈半,此時內前輪最大轉角β=27°。模型一中駕駛員僅將方向盤轉動半圈并維持此狀態不再變化,據此可假設模型一中內前輪轉角β=9°,此時設置轉彎半徑R1=14 m。據此,繪制出模型一的車輛軌跡,如圖2。
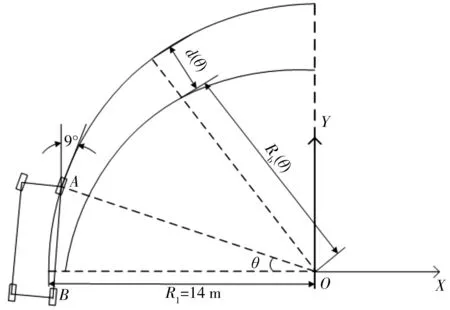
圖2 模型一車輪軌跡Fig. 2 Wheel trajectory of model 1
由圖2以公交車在交叉口處右轉為例,內前輪做勻速圓周運動,將內前輪的軌跡圓心作為原點,建立平面直角坐標系。0<θ<90°,用θ來表示不同時刻車輛內前輪與圓心所在X軸負方向的夾角,Rb(θ)為某一時刻內后輪的軌跡與圓心O的距離。將內輪差d(θ)定義為內前輪與內后輪在不同時刻的軌跡差(因內后輪到達某一地點永遠慢于內前輪到達該地點的時間),于是d(θ)=R-Rb(θ)。已知R1=14 m,求內輪差區域即可轉化為對內后輪坐標的研究。
設在任意t時刻,內前輪A點的坐標為(xa,ya),內后輪B點的坐標為(xb,yb),根據車輛框架可明顯得到:
(xa-xb)2+(ya-yb)2=L2
(4)
由于在t時刻,車輛內前輪A點與圓心所在X軸負方向的夾角θ已知,且內前輪軌跡為圓,則(xa,ya)已知,可以得到任一點處xb與yb的關系式。又因為(xa,ya)=(-R1cosθ,R1sinθ),內前輪的速度方向沿著軌跡的切線方向,設內前輪方向ω1為:
ω1=(sinθ,cosθ)
(5)
根據勻速圓周運動幾何規律可得出t與θ的關系為:
t=Rθ/Va
(6)
式中車輛內前輪速度為Va,由于車輛為前輪驅動,內后輪的運動方向始終沿著內前輪與內后輪的連線方向,即內后輪方向ω2為:
ω2=(xa-xb,ya-yb)/L
(7)
通過上式可將內前輪的轉向角β與ω1和ω2聯系起來:
cotβ=ω1·ω2/(|ω1|·|ω2|)=[(xa-xb)sinθ+(ya-yb)cosθ]/L=-[xbsinθ+ybcosθ]/L
(8)
β=9°,R1=14 m已知,任意時刻t的sinθ與cosθ也已知,可得到xb與yb的關系式。將式(4)(8)聯立,求出內后輪的軌跡坐標,帶入內輪差公式,得到模型一最終內輪差區域,即為模型一的禁停區域。
2.2 模型二
考慮到部分公交車駕駛員的實際駕駛情況,習慣雙手控制方向盤的駕駛員一般采用分階段轉彎,不一次將方向盤打到轉向最適合角度。因此,模型二假設駕駛員路口處90°轉向分為0~30°,30°~60°,60°~90°共3階段。由阿克曼公式可知,當車輛軸距不變,內前輪轉角變大時,公交車轉彎半徑會變小,由于3個階段的30°需組合成完整的90°拐角,因此O2設置于O1A連線上,取半徑為13.5 m;O3設置于O3A連線上,取半徑為12.88 m,且12.88 m恰好為最小轉彎半徑。由2.1節可知,公交車內前輪轉向最大角度β=27°,模型二假設第1、2、3階段中公交車內前輪轉角為9°、18°、27°,轉彎半徑R2=14.00、13.50、12.88 m。繪制出模型二的車輛軌跡圖,如圖3。
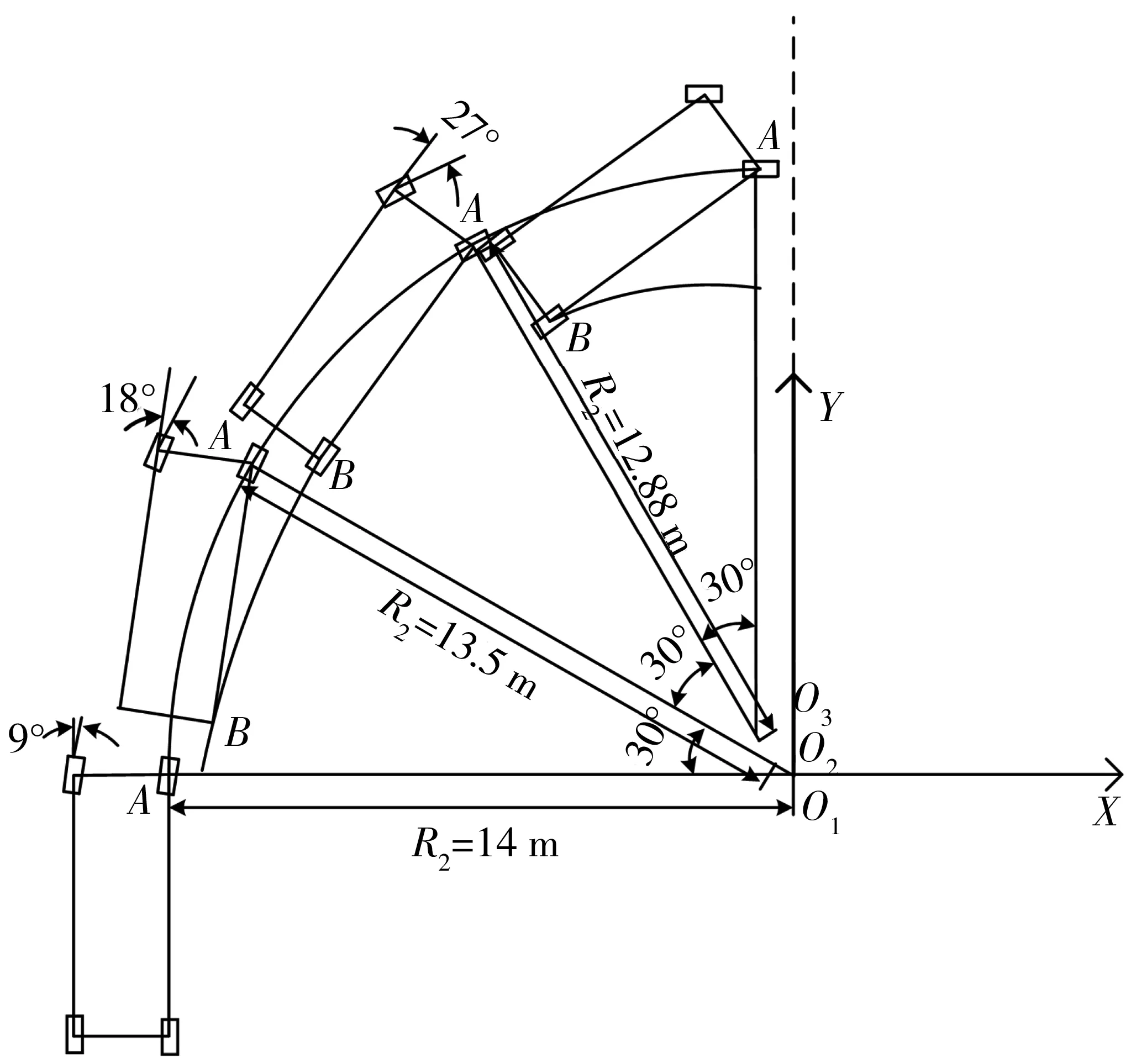
圖3 模型二車輪軌跡Fig. 3 Wheel trajectory of model 2
由圖3可知,當車輛在交叉口處剛準備右轉時,駕駛員先將方向盤打半圈,對應著的內前輪轉動了9°,并保持這一狀態運行了前1/3路程;當剛到達第1、2階段臨界點處時,駕駛員將方向盤再轉動1/2,對應內前輪再次轉動9°,并保持這一狀態運行了1/3路程;到達第2、3階段臨界點處時,駕駛員將方向盤打滿,再次轉動9°,保持這一狀態運行了1/3路程,最終完成路口處的90°轉向。模型二全過程用如表1。
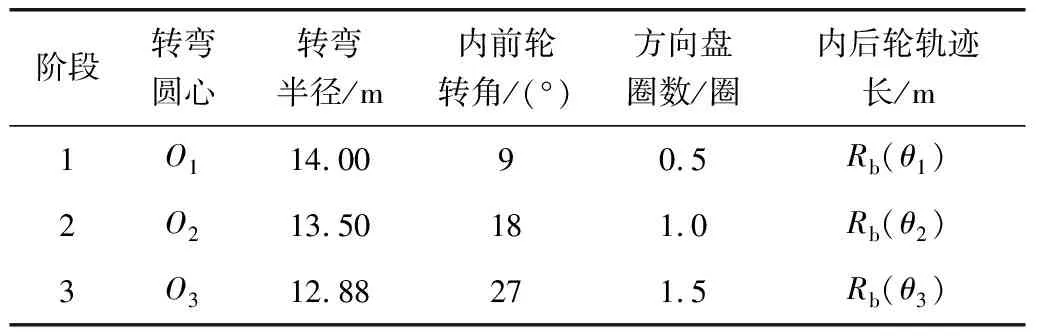
表1 三個階段的模型數據Table 1 Three-stage model data
表1中θ1、θ2、θ3分別為車輛前內輪與圓心O1、O2、O3所在X軸負方向的夾角,其中0≤θ1<30°;30°≤θ2<60°;60°≤θ3<90°因為(xa,ya)=(-R2cosθ-1.12,R2sinθ+1.12),且內前輪A的速度方向沿著軌跡的切線方向,規律同2.1節,故內前輪的轉向角β可由公式(5)~(8)求得。
由于用數據理論力學中的速度投影定理:剛體上任意兩點的速度在這兩點的連線上的投影相等。帶入公式(8)可得內后輪的速度分量形式為:
(9)
因θ=90°時,內后輪的坐標可通過幾何代數計算得到,對公式(9)積分就可得到內后輪的軌跡方程,進一步可求出內輪差區域,即為模型二的禁停區域。
2.3 模型三
模型三是在模型二的基礎上,進一步貼近實際情況的模型。在模型二中將轉彎分為3個不同階段,而在模型三中整個轉彎過程作為一個整體,公交車內前輪的轉角不是陡然變化,而是循序漸進地逐步達到最大轉向角度。即轉角隨時間的導數可能為一個定值。因此模型三中內前輪軌跡并非勻速圓周運動,而是“轉彎半徑”不斷變化的軌跡。并且模型需滿足已知的車輛在轉彎時曲率半徑先增大后減小的規律。
在高等數學中,有下列曲線:
(10)
式(10)滿足:①當0≤θ<45°時,曲率半徑是關于θ的單調遞增函數;②當45°<θ≤90°時,曲率半徑是關于θ的單調遞減函數;③當θ=45°時,曲率半徑達到最大值。此曲線的性質恰好滿足公交車內前輪轉彎軌跡規律。因此可以假設內前輪軌跡函數如式(11):
x3+y3=12.883
(11)
由于公交車為剛體車輛,故由模型三內后輪狀況仍滿足上兩個模型的狀況,即內后輪的運動方向始終沿著公交車前內輪與后內輪的連線方向。因此繪制出模型三的車輛軌跡圖,如圖4。
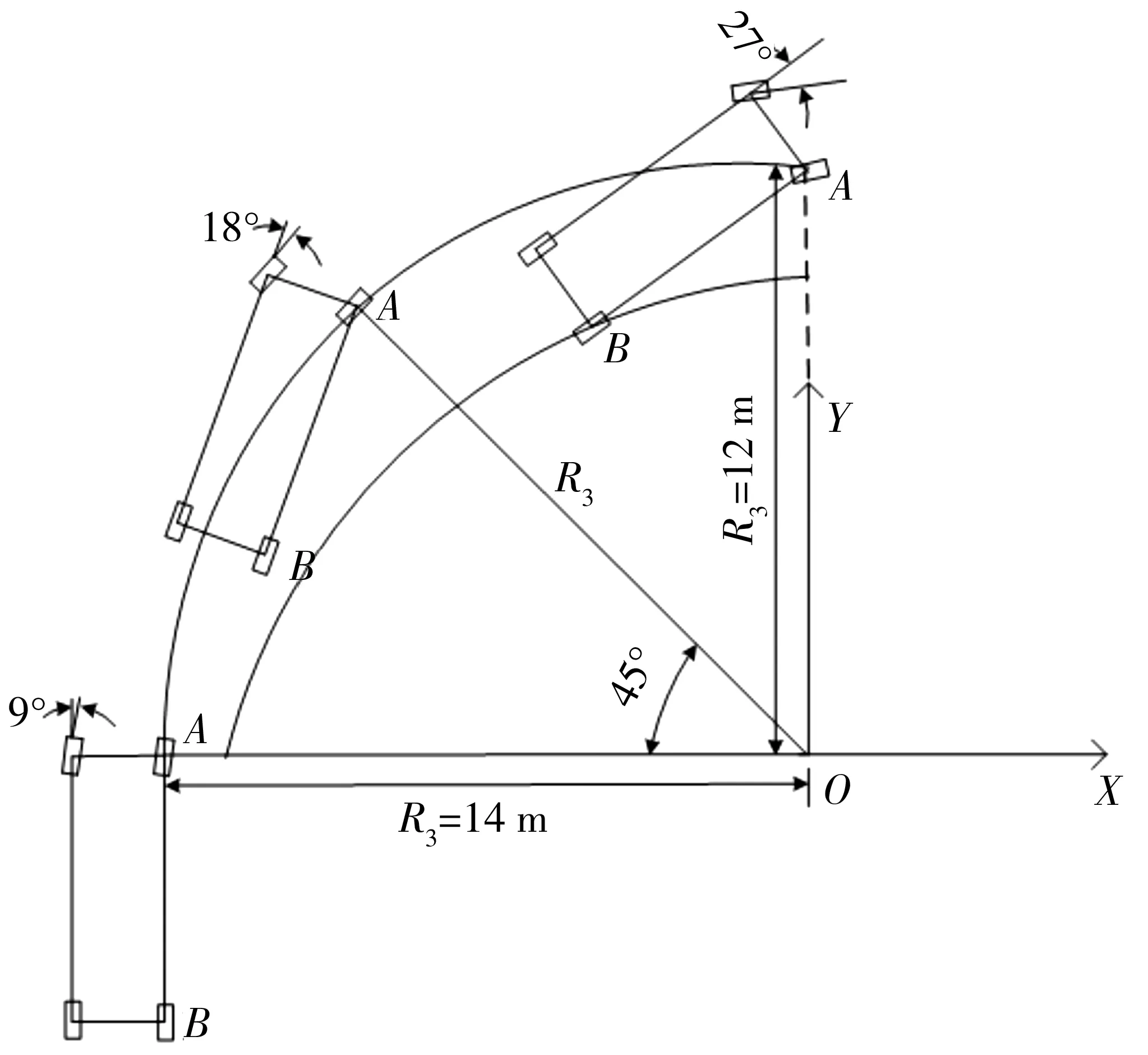
圖4 模型三車輪軌跡Fig. 4 Wheel trajectory of model 3
由圖5可知,內前輪的軌跡非勻速圓周運動,轉彎半徑R3起初為14 m,之后逐步減小,當完成轉向時,轉彎半徑R3為12.88 m,因此,模型三是最貼近實際情況的模型。如果可以在實際生活中測量出內后輪的實時運動軌跡,再與內前輪軌跡方程聯立,就可用MATLAB直觀地得出內輪差區域,即為模型三的禁停區域。
3 案例分析
對南京某一交叉口進行渠化設計。根據提出的3個模型所計算出的內輪差區域,以南進口道為例,對交叉口南進口道右轉專用車道進行內輪差禁停區域的分等級施劃,如圖5。
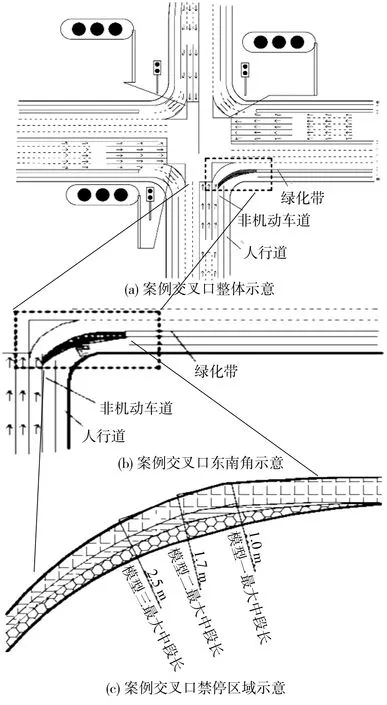
圖5 案例交叉口渠化示意Fig. 5 Schematic diagram of channelization of the case intersection
對第2節中3個模型的計算可知,模型三禁停區域的范圍最大,在轉彎完成一半時,內前輪的曲率半徑最大,于是施劃時區域中段長度最大,達到2.5 m;模型二施劃起終點的原則與模型一相同,且采用轉彎45°時內輪差最大的設計,以公交車為代表的大型車輛的內輪差最大可達到1.7 m;對模型一,相關研究最為詳盡,典型車型的最小轉彎半徑與軸距比也固定在2.0左右,且內輪差的數值分布多在0.5~1.0 m之間[15],于是考慮將轉彎45°時的最大值設置為1.0 m。
以往研究對于禁停區域的研究成果大多落實于警示系統的設計,僅上海市部分路口處設置了內輪差效應的禁停區域。筆者根據構建的3個模型,對內輪差效應的禁停區域范圍進行危險等級的劃分,即:① 3種禁停區域重合區為絕對禁止駛入的區域,如圖6中最寬為1.0 m的月牙形區域;②模型一與模型二重合的部分為相對危險的區域,在駛入時要嚴格注意轉彎車輛狀況,如圖6中最寬為1.7 m的月牙形區域;③為提醒道路使用者提高注意力區域,尤其是在有公交車轉彎時該區域也嚴禁駛入,如圖6中最寬為2.5 m的月牙形區域。
4 結 語
筆者通過現場觀測南京市公交車右轉時內部與外部規律,結合實時道路情況,將公交車駕駛員轉向操作分為3類,并據此設計出3種公交車轉向內輪差模型,對每種模型都用高等數學、理論力學等知識進行研究,計算出模型對應的內輪差區域即禁停區域。最后以南京市某一交叉口作為案例進行分析,給出3種模型禁停區域范圍:①模型一、二、三禁停重合區域,即最寬處1.0 m月牙形區域為絕對禁止駛入的區域;②模型一、二重合區域,即最寬處1.7 m月牙形區域為相對危險的區域,在駛入時要嚴格注意轉彎車輛狀況;③模型三禁停區域,即最寬處2.5 m的月牙形區域為提高注意力區域,道路使用者應提高注意力,尤其是在有公交車轉彎時該區域也嚴禁駛入。
筆者模型將模型計算得到的內輪差區域按危險等級進行施劃,從設施優化方面可以減少甚至避免內輪差效應導致的交通事故的風險。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52