高速公路改擴建期間強制變道行為駕駛模擬的有效性研究
2021-09-27 05:31:22張彥寧孟凌霄劉學強
重慶交通大學學報(自然科學版) 2021年9期
孫 智,張彥寧,孟凌霄,劉學強
(1. 中國建設基礎設施有限公司,北京 100044; 2. 同濟大學 道路與交通工程教育部重點實驗室,上海 201804;3. 中建筑港集團有限公司,山東 青島 266031)
0 引 言
為了保證正常的交通運營,高速公路改擴建施工一般采用封閉部分車道,邊運營邊施工的策略。封閉部分車道使得車輛在進入施工路段前由當前車道向未封閉車道變道,而在這種強制變道過程中易發生追尾、側向碰撞等交通事故[1]。駕駛模擬技術是研究類似交通安全問題的有效工具,可在安全環境中再現危險行車場景并采集駕駛行為數據,具有良好的安全性和可靠性。
在駕駛模擬實驗前,需要確定駕駛模擬器有效,以保證實驗結果可靠。駕駛模擬的有效性是使用駕駛模擬技術研究交通問題的前提[2],一般通過駕駛行為數據進行判斷,包含速度、距離、時距、越線行為等;張翔等[3]提出駕駛模擬器的有效性可通過實車、駕駛模擬對比實驗和統計檢驗方法進行分析;劉兆等[4]用車速驗證了不同平面線形下駕駛模擬器的有效性,對比發現預測速度軌跡曲線與實車速度軌跡曲線具有相同的變化規律;毛喆等[5]指出可以使用車速和車輛橫向偏移距離進行駕駛模擬器的校驗,研究結果表明實車駕駛環境和模擬環境下車速變化規律基本一致;涂輝招等[6]用速度、加速度、油門剎車踏板力來分析不同自由度下駕駛模擬實驗結果的差異,并通過t檢驗判斷駕駛模擬有效性。
有時候,難以實現駕駛模擬器的絕對有效性,因為安全封閉的駕駛環境讓駕駛人無法感受到駕駛危險性,從而產生激進的駕駛行為。V. BRANZI等[7]發現在研究交叉路口駕駛行為的駕駛模擬實驗中,駕駛人總是超過臨時限速并且發生急減速;J.TORNROS[8]指出使用駕駛模擬器研究隧道內駕駛行為時,車輛速度比實車駕駛時要大;D. LLOPIS-CASTELL等[9]、F. BELLA[10]通過實車駕駛實驗和駕駛模擬實驗的對比,也發現駕駛人在駕駛模擬實驗時車速比實車實驗時高。
針對高速公路改擴建期間強制變道場景,筆者進行了駕駛模擬有效性分析并提出了統一的有效性檢驗方法。首先,設計實車駕駛和駕駛模擬實驗方案;然后,提出強制變道有效性分析的關鍵行為指標,開展實車駕駛實驗和駕駛模擬實驗,觀察駕駛模擬環境下駕駛人是否產生相對激進的駕駛行為;最后,進行駕駛模擬有效性分析。研究結果表明:駕駛模擬器可以有效地應用于高速公路改擴建期間強制變道行為的研究。
1 實驗方案
1.1 實驗設備
1)實車駕駛實驗。用整合慣導系統、GPS以及數據處理系統的實驗用車〔圖1(a)〕來采集實驗數據;用車載數據處理系統和行車記錄儀記錄特殊事件時間(如車輛開始變道時間),采集數據的頻率為10 Hz。
2)駕駛模擬實驗。同濟大學駕駛模擬平臺擁有8個自由度的運動平臺,駕駛艙內搭建250°環形屏幕和音響系統以模擬實車駕駛的視聽體驗,如圖1(b)。通過模擬各種交通環境,配合SCANeRTM軟件,由駕駛艙內實車上安裝的傳感儀采集各種交通運行狀態下駕駛人的駕駛行為數據以及車輛狀態數據,數據的采集頻率為10 Hz。

圖1 實驗設備Fig. 1 Test devices
1.2 實驗環境
1)實車駕駛實驗路段位于山東省某正在進行施工作業的高速公路,高速公路為雙向四車道、限速100 km/h,全長10 km。
2)與實車駕駛實驗場景相對應,在SCANeRTM駕駛模擬軟件中構建相同線形、相同施工路段設施布置的模擬場景進行駕駛模擬實驗。
實車駕駛實驗和駕駛模擬實驗施工路段限速60 km/h;按照JTG D 82—2009《公路交通標志和標線設置規范》要求,設置了相同的限速、施工警告及車道變窄等標志。
1.3 實驗人員
參照D. DAVENNE等[11]的實驗人員招募方案,實車實驗和駕駛模擬實驗均招募擁有合法駕駛執照、超過實習期并有日常駕駛經驗的駕駛人。為了避免年齡、駕駛經驗等對實驗結果產生干擾,對駕駛人年齡和駕駛經驗進行了控制:
1)實車駕駛實驗。20名駕駛人,平均年齡25.4歲,標準差3.5歲;平均駕齡3.3年,標準差1.5年。
2)駕駛模擬實驗。16名駕駛人,平均年齡25.6歲,標準差2.4歲;平均駕齡3.7年,標準差1.1年。
1.4 實驗流程
根據R. A. WYNNE等[2]的相對有效性驗證方法,同時考慮施工路段的線形、布置方式等影響因素[12-13],筆者設計了2×4×3的實驗方案來觀察駕駛行為指標的變化趨勢,即2種實驗環境(實車駕駛環境、駕駛模擬環境)、4種施工路段長度(100、500、1 000、1 500 m)及3種施工路段線形(左轉、直線、右轉)。實驗中,要求駕駛人在指定車道行駛,當發現前方存在由于施工作業導致行車道封閉情況時,駕駛人自行判斷并實施變道操作。
實驗前,對駕駛人進行了預實驗,以幫助駕駛人熟悉實驗用車和駕駛模擬器。為避免重復實驗而影響結果,每人每場景只進行一次實驗。
2 有效性判別指標及判別方法
2.1 有效性判別指標
選取斷面車速v、特征斷面間距Δd、特征斷面時距Δt作為分析強制變道行為駕駛模擬有效性的行為指標。
2.1.1 斷面車速v
斷面車速v即車輛通過某一特征斷面時的速度。強制變道行駛狀態中,特征斷面包含變道開始點、越線點及變道結束點,如圖2,圖中縱坐標l為車輛距車道線的距離。
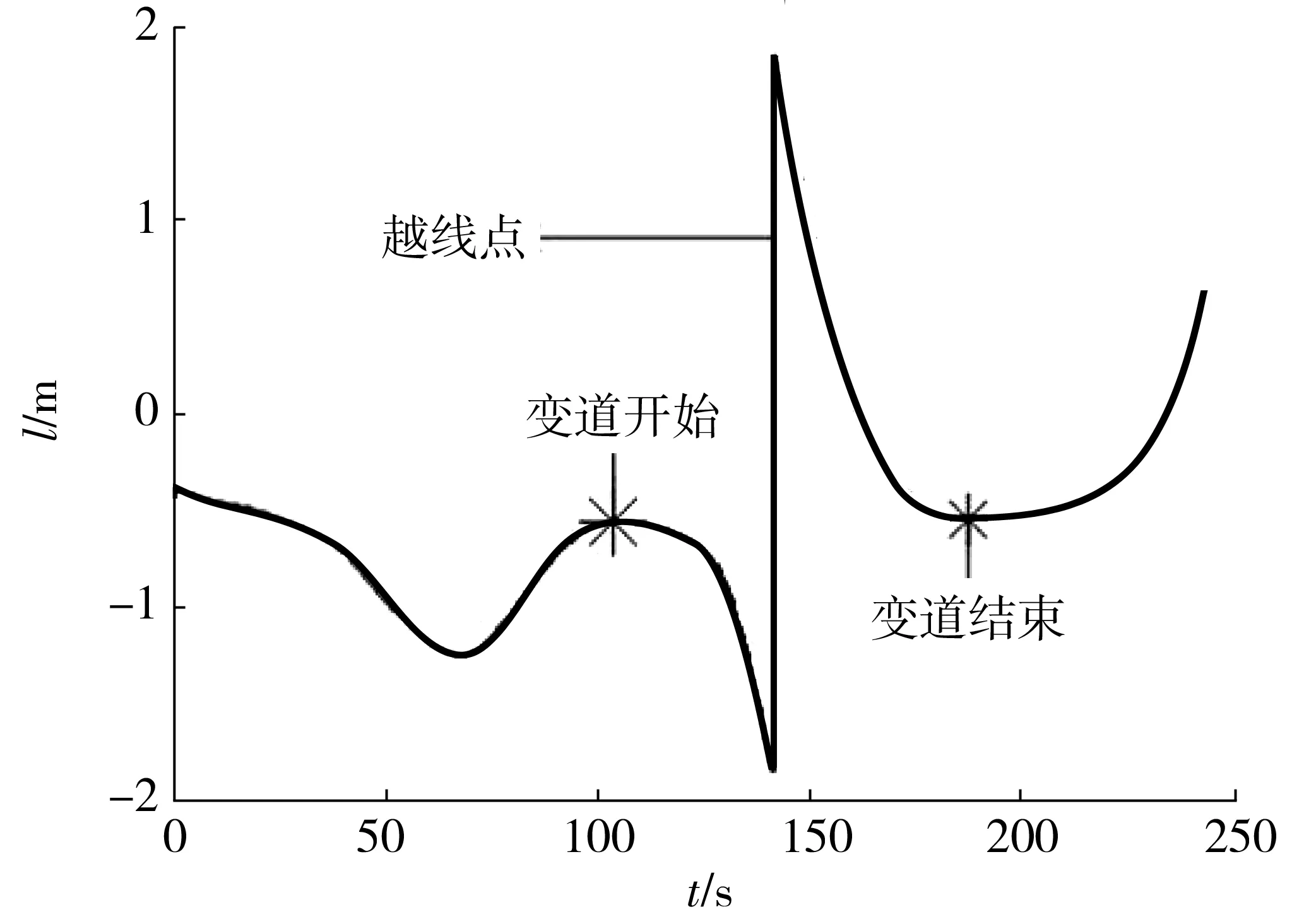
圖2 變道特征點示意Fig. 2 Schematic diagram of lane-changing feature points
2.1.2 特征斷面間距Δd
特征斷面間距Δd指變道特征點與施工路段過渡段起點(以下簡稱“施工路段起點”)之間沿道路中線的距離,按式(1)計算:
Δd=dend-dstart
(1)
式中:dstart、dend分別為變道特征點、施工路段起點斷面的樁號,m。
2.1.3 特征斷面時距Δt
特征斷面時距Δt指車輛通過變道特征點與施工路段起點的行駛時間差,按式(2)計算:
Δt=tend-tstart
(2)
式中:tstart、tend分別為車輛通過變道特征點、施工路段起點斷面時刻的時間,s。
2.2 變道特征點識別
變道特征點可通過車輛橫向位置進行識別[14-15]。筆者結合GPS、模擬平臺數據采集系統和行車記錄儀采集的視頻資料,對車輛橫向位置數據進行判斷,以識別變道特征點。
按式(3)進行變道開始點和變道結束點識別:
{i|i∈Pstart}={i|y′i-1·y′i<0}
(3)
按式(4)進行越線點識別:
{i|i∈Pend}={i|yi=ylane}
(4)
式中:Pstart為減速起始點集合;Pend為減速終止點集合;y′i-1、y′i分別為i-1、i時刻車輛橫向偏移率,m/s;yi為i時刻車輛橫向位置,m;ylane為車道線的橫向位置,m。
2.3 有效性判別方法
指標的有效性包括絕對有效性和相對有效性2種。
1)絕對有效性即實車實驗獲得的分析指標值與駕駛模擬實驗獲取的分析指標值相等,筆者采用非參數Wilcox檢驗進行指標的絕對有效性判斷。Wilcox檢驗的原假設為2種駕駛環境中駕駛行為無顯著差異。
2)相對有效性即駕駛模擬實驗結果具有與實車駕駛實驗結果相似或相同的趨勢,筆者采用多元線性回歸模型檢驗進行指標的相對有效性判斷。當2種駕駛環境自變量回歸系數符號相同時,駕駛行為隨自變量的變化趨勢相同,則認為該行為指標具有相對有效性。
3 實驗結果
1)斷面車速、特征斷面間距及特征斷面時距實驗結果如圖3。
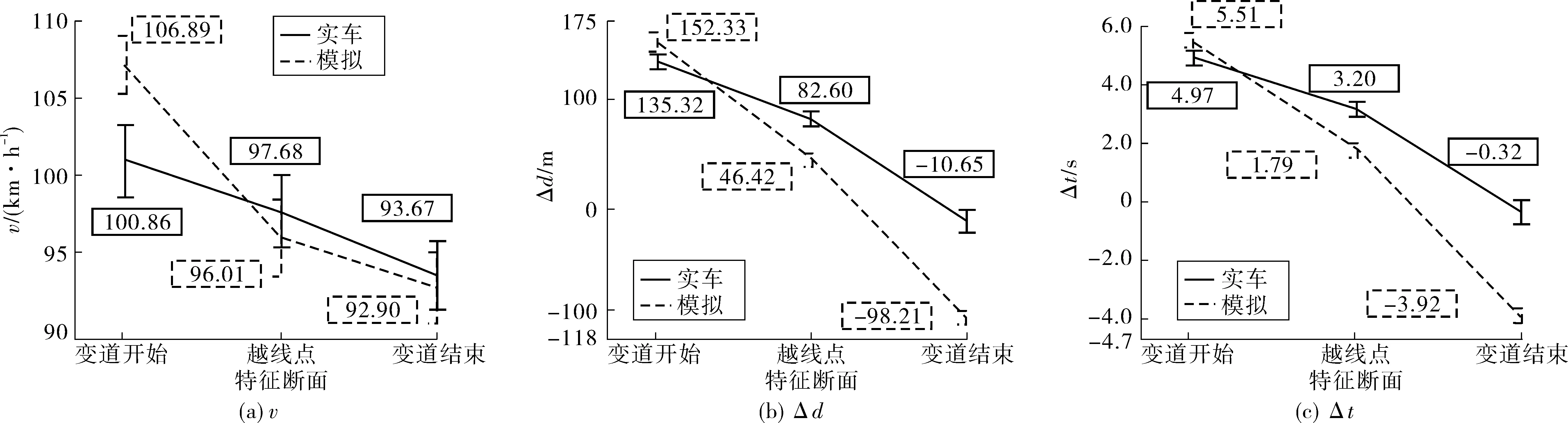
圖3 斷面車速v、特征斷面間距Δd及特征斷面時距Δt實驗結果Fig. 3 Test results of spot speed v, spot spacing Δd and headway Δt
2)斷面車速、特征斷面間距及特征斷面時距絕對有效性分析結果如表1。

表1 斷面車速v、特征斷面間距Δd及特征斷面時距Δt絕對有效性分析結果Table 1 Analysis result of absolute validily of spot speed v, spot spacing Δd and headway Δt
3)斷面車速、特征斷面間距及特征斷面時距相對有效性分析結果如表2。
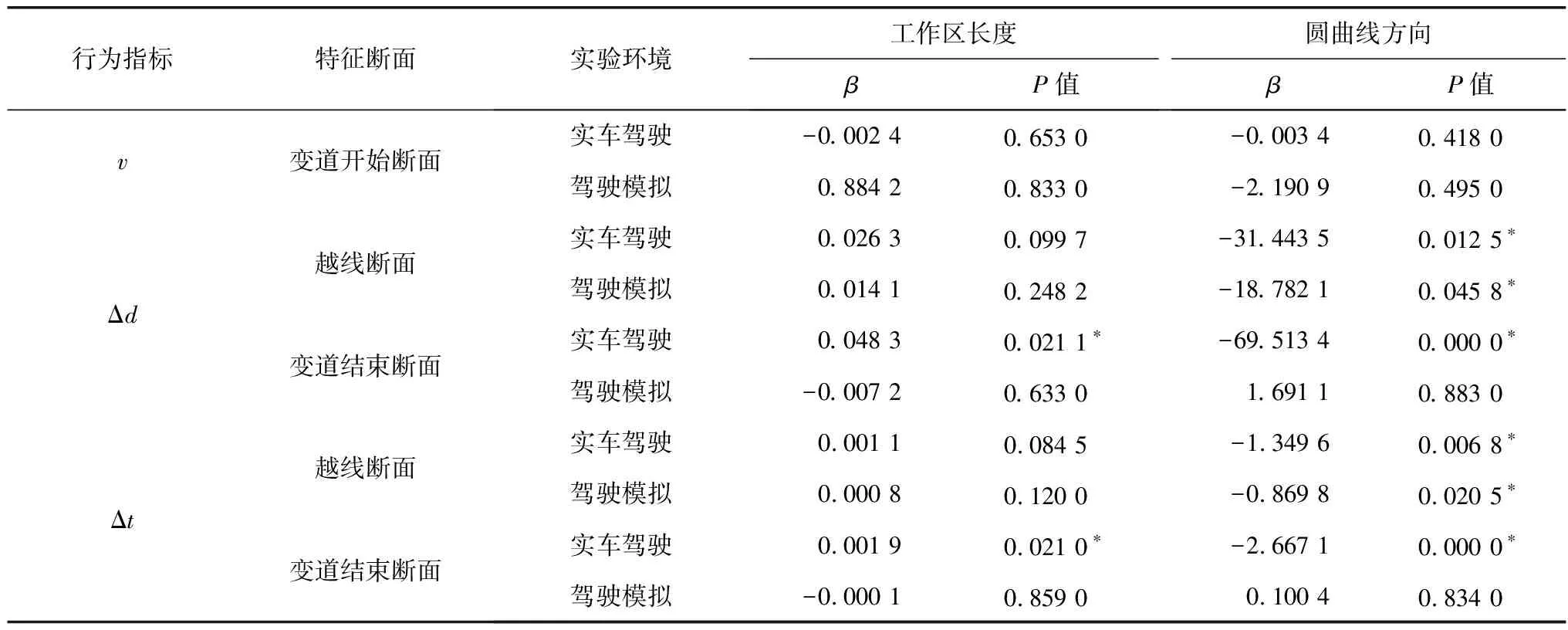
表2 斷面車速v、特征斷面間距Δd及特征斷面時距Δt相對有效性分析結果Table 2 Analysis result of relative validily of spot speed v, spot spacing Δd and headway Δt
4 分 析
4.1 斷面車速v
4.1.1 斷面車速實驗結果分析
由圖3(a)可見:
1)各斷面在不同駕駛環境中的斷面車速v差距均較小,如:在變道開始斷面,實車實驗的比駕駛模擬實驗的小5.6%;在越線斷面,實車駕駛的比駕駛模擬實驗的大1.7%;在變道結束斷面,實車駕駛的比駕駛模擬實驗的大0.8%。
2)駕駛模擬實驗中駕駛人在進行強制變道行為時減速較劇烈,變道過程中車速較高,表現出相對激進的駕駛行為。
4.1.2 斷面車速絕對有效性分析
由表1可見:在變道開始斷面,2種駕駛環境的斷面車速具有顯著的差別(P=0.012 4);越線斷面及變道結束斷面,2種駕駛環境的斷面車速的差異均不顯著,即具備統計顯著的絕對有效性。
4.1.3 斷面車速相對有效性分析
由表2可見:在變道開始斷面,工作區長度、圓曲線方向對斷面車速影響不顯著。因此,不可通過所選自變量來判斷變道開始斷面車速的相對有效性。模擬環境中變道開始斷面車速較高,分析原因可能是駕駛人在相對寬松和安全的模擬環境中表現出相對激進的駕駛行為。
4.2 特征斷面間距Δ d
4.2.1 特征斷面間距實驗結果分析
由圖3(b)可見:
1)在變道開始斷面,實車駕駛實驗的Δd比駕駛模擬實驗的小11.2%;在越線斷面,實車駕駛實驗的Δd比駕駛模擬實驗的大77.94%。
2)2種駕駛實驗中,變道結束斷面分別位于上游過渡段起點斷面的上游和下游。駕駛模擬實驗中,駕駛人在更靠近施工路段工作區的地方結束變道行為,這可能造成車輛與交通附屬設施的碰撞,表現出較為激進的駕駛行為。分析原因可能是由于相對安全的模擬駕駛環境影響了駕駛人對行車風險的認知而造成的。該結論與H.B.EKANAYAKE等[16]的研究結論相符。
4.2.2 特征斷面間距絕對有效性分析
由表1可見:不同駕駛環境中變道開始斷面至施工路段開始斷面之間間距沒有顯著差異(P=0.368 1),變道開始斷面的特征斷面間距Δd具有絕對有效性。
4.2.3 特征斷面間距相對有效性分析
由表2可見:不同駕駛環境中越線斷面至施工路段起點斷面之間的間距均受圓曲線方向的顯著影響,且影響趨勢相同。說明越線斷面、變道結束斷面的特征斷面間距Δd具有相對有效性。
4.3 特征斷面時距Δ t
4.3.1 特征斷面時距實驗結果分析
由圖3(c)可見:
1)在變道開始斷面,實車駕駛實驗的Δt比駕駛模擬實驗的小9.8%;在越線斷面,實車駕駛實驗的Δt比駕駛模擬實驗的大78.8%;在變道結束斷面,實車駕駛實驗的Δt比駕駛模擬實驗的大91.8%。
2)不同駕駛環境中特征斷面時距Δt差別較大。同樣,駕駛模擬實驗中駕駛人表現出了更加激進的駕駛行為。
4.3.2 特征斷面時距絕對有效性分析
由表1可見:不同駕駛環境中變道開始斷面至施工路段開始斷面之間時距沒有顯著差異(P=0.339 3),變道開始斷面的特征斷面時距Δt具有絕對有效性。
4.3.3 特征斷面時距相對有效性分析
由表2可見:不同駕駛環境中越線斷面至施工路段起點斷面之間的時距均受圓曲線方向的顯著影響,且影響趨勢相同。說明越線斷面、變道結束斷面的特征斷面時距Δt具有相對有效性。
4 結 語
筆者開展了實車駕駛實驗和駕駛模擬實驗,分析了高速公路改擴建期間強制變道行為駕駛模擬的有效性,得到以下主要結論:
1)斷面車速、特征斷面間距以及特征斷面時距均在一定程度上表現出了駕駛模擬有效性。其中:越線斷面、變道結束斷面的斷面車速具有絕對有效性;變道開始斷面的特征斷面間距、時距具有絕對有效性,越線斷面、變道結束斷面的特征斷面間距、時距具有相對有效性。從而驗證了駕駛模擬器在高速公路改擴建強制變道行為研究中的有效性。
2)駕駛人在駕駛模擬環境中表現出了較為激進的駕駛行為,例如急減速、較高車速等。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
甘肅教育(2020年6期)2020-09-11 07:45:28
大眾投資指南(2020年10期)2020-07-24 08:03:48
甘肅教育(2020年12期)2020-04-13 06:24:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55