未知緯度條件下基于空間圓擬合的SINS初始對準方法
2021-09-28 06:36:40管世印張志利周召發
導航定位與授時 2021年5期
關鍵詞:方法
管世印,張志利,周召發,梁 哲
(火箭軍工程大學導彈工程學院,西安 710025)
0 引言
捷聯慣導系統(Strapdown Inertial Navigation System,SINS)在進入導航狀態前必須進行初始對準。SINS的初始對準通常需要精確的緯度值來構建參考矢量模型,而當對準環境較為惡劣時,如在隧道、水下、地下等環境中獲得精確的緯度值并不容易,研究未知緯度條件的對準具有一定的理論意義與應用背景。為此可以從兩方面考慮,一是進行緯度的估計,通過2個不同時刻的重力加速度夾角與緯度之間的幾何關系進行求解[1-2];二是通過重力矢量幾何運算求得北向信息,改進對準算法[3-4]。
在處理晃動基座對準問題上,通常采用基于慣性系或中間參考坐標系的對準方法,通過空間中凝固某一時刻坐標系作為過渡傳遞矩陣,求得對準矩陣,且粗對準的結果尤其是偏航角的對準結果往往誤差較大[5-7]。
理想情況下,在任一慣性系中觀察,重力矢量繞地軸旋轉形成一錐面,重力矢量的端點形成一空間圓即圓錐底面。為此,本文以初始時刻凝固載體坐標系為慣性系,對重力矢量低通濾波后進行空間圓數值擬合得到旋轉地軸矢量,通過矢量解算得到對應時刻的地理坐標系,進行矩陣連乘得到對準矩陣,完成對準過程。
1 基于空間圓擬合的對準方法
定義地理系東北天為導航坐標系n系,載體坐標系為b系,初始時刻載體坐標系為b0系,初始時刻地理坐標系為n0系。
1.1 傳統的基于慣性系的對準方法
基座晃動會引入晃動角速度,而地球自轉角速度ωie數量級為10-5rad/s,導致陀螺儀無法從測量值中將地球自轉角速度識別出來,因此基于地球自轉角速度和重力加速度矢量的雙矢量定姿方法無法在晃動基座下使用[8]。為此,傳統晃動基座對準方法采用基于重力矢量的慣性系間接對準方法,根據慣性系的不同,可以分為地理系、地心慣性系、地球系等,以地理系為例,其對準傳遞矩陣為
(1)

(2)
式中,sl、cl為lat的正弦和余弦值。

(3)

多矢量Wahba方法是指通過構建指標函數求解最優矩陣,通常其求解方法包括奇異值分解法和最優四元數估計方法等[10-12],不同的求解方法之間存在等價性[13]。對重力矢量進行m次觀測時的指標函數為
(4)
式中,ωi為標量權值,可選為1。
1.2 基于空間圓擬合的對準模型

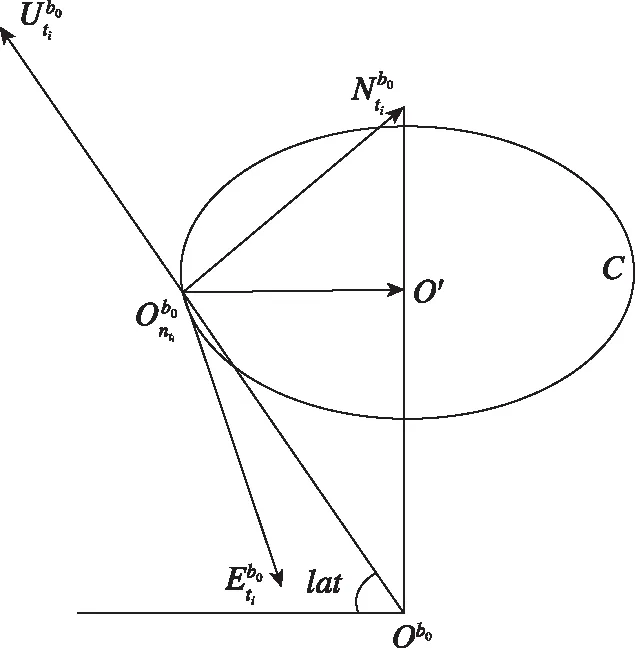
圖1 凝固載體系內構建地理坐標系示意圖
(5)
(6)
(7)
通過矩陣連乘
(8)
2 旋轉地軸解算模型
2.1 重力矢量投影至載體系

(9)
式中
(10)
由于基座的晃動往往會引入線運動的干擾,導致無法使用真實的重力信息,為此通常選擇引入低通濾波器等方式對投影的重力矢量進行濾波處理。濾波原理為在b0系內觀察重力信息,重力信息的變化頻率為
(11)
而一般情況下基座晃動引起的線運動干擾的頻率遠高于此,因此可以采取低通濾波處理線運動的干擾。
低通濾波器參數通常設置為:濾波器類型為巴特沃斯低通模擬濾波器,通帶頻率Wp=0.001Hz,通帶衰減Rp=1dB,截止頻率Ws=0.05Hz,阻帶衰減Rs=40dB,采樣頻率為125Hz,該濾波器可以使低頻的重力信號通過而對高頻的擾動信號起到衰減作用。
2.2 求解擬合端點平面方程
ax+by+cz-1=0
(12)
式中,a、b、c為平面參數,理想情況下,b0系內所有重力矢量投影點端點均在一個平面方程上,以此構建誤差觀測方程
(13)
根據最小二乘理論,平面法向量為
[a,b,c]T=(ATA)-1ATI
(14)
式中
(15)
(16)
2.3 求解擬合圓圓心坐標
根據圓心O′(x0,y0,z0)與任意弦中點連線垂直于弦的特點,對于圓上任意兩點可構建中垂線方程
(17)
結合平面方程(12),可構建誤差觀測方程
(18)
式中
(19)
式(18)和式(19)即為間接平差模型[14-15],根據最小二乘理論,圓心O′的最小二乘解為
O′T=(FTPF)-1FTPl
(20)
其中,權值矩陣P為單位陣
(21)
(22)
通過上述分析可知,對準方法不需要知道具體的位置信息,對準前首先利用慣性器件測量信息進行空間圓擬合,得到空間圓圓心O′,再通過空間矢量計算與矩陣連乘得到對準矩陣。
3 仿真驗證
為說明基于空間圓擬合SINS初始對準方法(以下簡稱為擬合對準方法)的有效性,設置仿真環境如下:
(23)
由于基座晃動引起的載體3個軸向的線運動干擾(單位為m/s)設定為
(24)
分別使用擬合對準方法、積分雙矢量方法和多矢量Wahba方法進行50次對準,其中多矢量Wahba方法采用最優四元數估計方法進行求解,其姿態角誤差如圖2所示,姿態角誤差均值如表1所示。
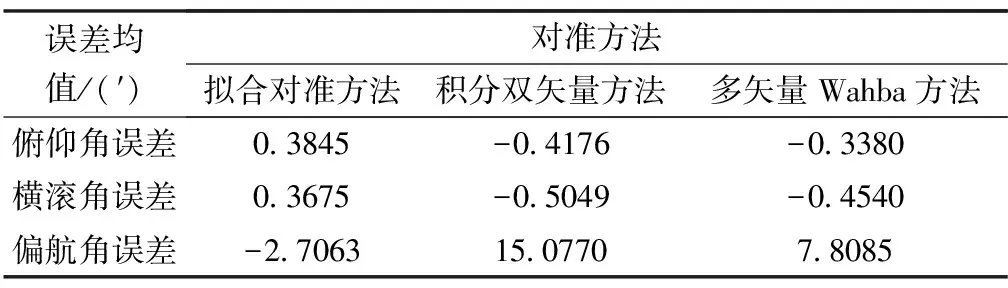
表1 三種對準方法姿態角誤差均值比較
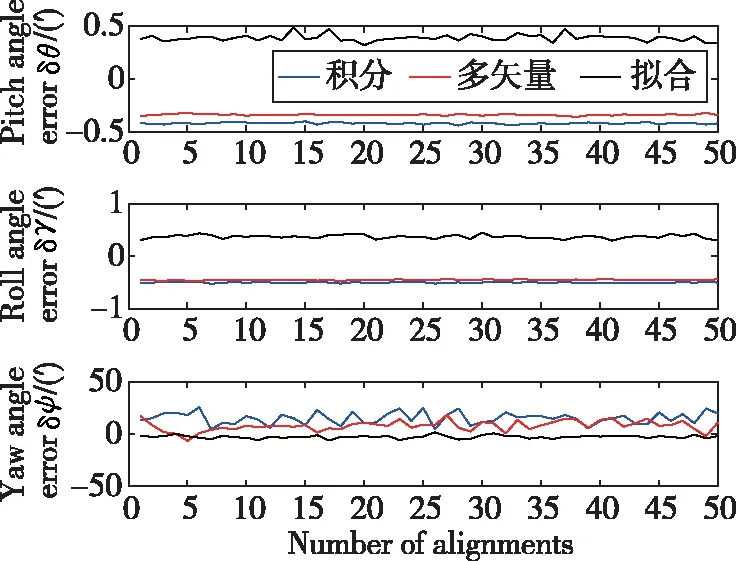
圖2 不同對準方法姿態角誤差
通過分析可知,三種方法的姿態角誤差均值均能達到粗對準要求,且三種方法的水平姿態角精度相當,擬合對準方法的偏航角精度相比于積分雙矢量方法和多矢量Wahba方法分別提升了12.37′和5.10′。
從算法穩定性上看,如表2所示,多矢量Wahba方法的水平姿態角誤差穩定性要好于擬合對準方法和積分雙矢量方法,但偏航角誤差穩定性不如擬合對準方法。
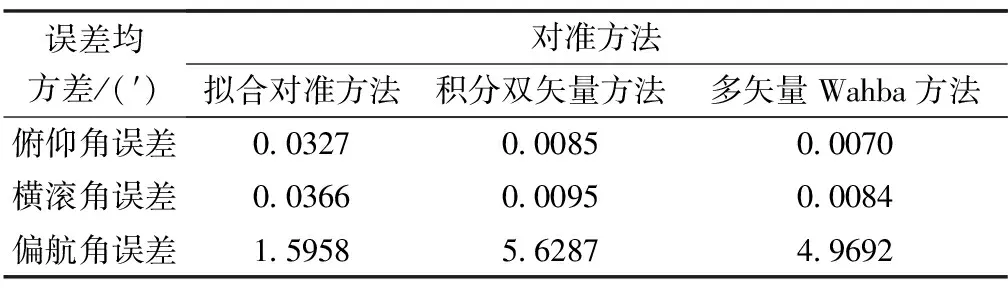
表2 三種對準方法姿態角誤差均方差比較
需要說明的是,與積分雙矢量方法和多矢量Wahba方法不同的是,為了取得較好的空間圓擬合效果,擬合對準方法需要利用一定時間段內的慣導測量數據進行擬合來得到對準結果,在多次驗證中表明,最小擬合時間可預先設定為1min,這也是下一步需要對算法進行優化的方面。
4 結論
1)本文提出了一種未知緯度條件下基于空間圓擬合的SINS初始對準方法,首先將重力信息投影至凝固載體系并進行濾波處理,根據重力矢量繞地軸旋轉特性建立間接平差模型,利用慣組測量數據進行空間圓擬合得到旋轉地軸,并通過幾何關系解算對準矩陣;
2)為了獲得較好的空間圓擬合效果,通常需要采集一定的慣導測量數據才能進入對準過程,實時性不如傳統方法,但仍可在常用對準時間內獲得優于傳統方法的對準精度,下一步研究的側重點在于對算法實時性進行優化;
3)與傳統對準方法相比,其優點在于通過矢量積反求對準點緯度,對準不需要精確緯度信息且偏航角對準精度與穩定性提升明顯。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12