多系統混頻非差非組合精密單點定位方法研究
2021-09-28 06:37:24李宏宇侯毅男楊福鑫
導航定位與授時 2021年5期
趙 琳,李宏宇,侯毅男,楊福鑫,李 亮
(哈爾濱工程大學智能科學與工程學院,哈爾濱 150001)
0 引言
精密單點定位(Precision Point Positioning,PPP)具有作業靈活、無需基站輔助的優勢,廣泛應用于海洋高精度定位,具有重要的應用價值。根據電離層處理策略的不同,PPP模型可以分為無電離層組合模型、Uofc模型以及非差非組合模型。其中,非差非組合PPP模型直接使用原始偽距和載波相位觀測值,具有不會放大噪聲;可引入外部電離層約束,加快收斂;可提供高精度的電離層延遲信息的優點[1]。隨著全球導航衛星系統(Global Navigation Satellite System,GNSS)的建設與發展,圍繞多系統多頻率特征開展的相關研究已成為GNSS應用領域的重要研究內容。盧秋陽結合實測北斗三頻數據,通過對現有三頻周跳檢測與修復方法進行系統的比較研究,提出了一種基于電離層變化的實時周跳探測方法[2]。王澤民等論述了Galileo系統4個頻率的載波組合觀測值及相關的誤差特性,并按一定標準篩選出具有特定性能的組合觀測值[3]。張小紅等從定位精度和收斂性兩方面,研究分析了三頻無電離層組合模型、三頻消電離層組合模型和三頻非組合模型PPP靜態及動態定位性能,并與傳統雙頻無電離層組合進行比較,結論是三頻PPP定位精度有所提高,并且具有更高的可靠性和抗差性能[4]。M.Elsobeiey根據不同策略選取了9組全球定位系統(Global Positioning System,GPS)三頻線性組合PPP方案,實驗結果表明,三頻線性組合PPP可將傳統雙頻PPP的收斂時間和定位精度提高大約10%[5]。李博峰等研究了使用GNSS組合觀測量進行長距離實時精密導航的方法[6]。X.Lou等研究了GPS+GLONASS+BDS+Galileo四系統聯合的非差非組合PPP模型與算法,并利用105個多模GNSS實驗跟蹤網(Multi-GNSS Experiment,MGEX)測站的多系統觀測數據,分析了不同系統聯合的單、雙頻PPP定位精度和收斂速度,結果表明,多系統觀測值的加入可以明顯改善PPP定位性能和可靠性[7]。
在多模多頻條件下,沿用現有組合觀測值的策略(無電離層組合)處理數量眾多的原始觀測值,將存在以下問題:1)隨著信號個數的增加,待求的獨立偏差個數增多,特征組合數量增加,合理選擇與評價最優組合的難度就會隨之增加;2)特征組合會損失某類信息;3)需要所有觀測單元的原始觀測值中必須包括組合所需的特征信號,若缺失其中一類觀測值,將使得其他觀測值也無法參與解算,從而導致原始觀測信息損耗;4)需要針對不同的解算目的選擇特定的觀測組合。采用非差非組合思路能夠最大限度地保留原始觀測信息,利于單頻、雙頻、多頻模型的統一表達,靈活兼容各類應用需求。
現有關于多模多頻的研究幾乎沒有將多模與多頻結合起來,研究多系統采用多系統雙頻模型,研究多頻率采用單系統三頻模型。這主要是由于除了北斗系統外,其余系統無法保證全星座都提供三頻信號。
綜上,本文對多系統混頻非差非組合PPP進行了研究,推導了多系統混頻模型即北斗三頻+GPS雙頻+GLONASS雙頻PPP模型,實現了多系統混頻非差非組合PPP,進而達到增強PPP可靠性、提高PPP定位性能的目的。
1 多系統混頻非差非組合PPP函數模型
隨著多導航系統多頻觀測值的獲取以及數據處理理論的深入發展,相對硬件延遲的定義也進一步延伸,通常分為系統間偏差(Inter-System Bias,ISB)和頻間偏差(Inter-Frequency Bias,IFB)。ISB描述了不同系統間的通道延遲偏差,在使用多模信號時,必須要考慮該項偏差;IFB為同一系統不同頻率信號的通道延遲偏差,由于GLONASS系統采用頻分多址(Frequency Division Multiple Access,FDMA)技術,不同衛星具有不同的頻率、偽距和載波IFB,需考慮該項偏差。北斗系統采用三頻信號,同樣需考慮IFB。
1.1 標準雙頻非差非組合PPP模型
本文模型采用北斗三頻+GPS雙頻+GLONASS雙頻非差非組合PPP模型,需顧及系統間偏差、GLONASS頻間偏差以及BDS頻間偏差。為了方便推導后續顧及IFB、ISB的PPP模型,首先推導統一的標準雙頻非差非組合PPP模型。
非差非組合PPP處理模型由原始偽距和載波相位模型推導而成,由于引入了各信號特征性時延偏差和電離層估計等參數,在靈活建模的同時,帶來許多參數間相關的問題。衛星端非校正偽距硬件延遲(Uncalibrated Code Delay,UCD)與衛星鐘差線性相關;接收機端UCD與接收機鐘差及電離層參數線性相關;非校正相位硬件延遲(Uncalibrated Phase Delay,UPD)與模糊度線性相關。在沒有額外基準約束的情況下,上述參數無法分離,故無法直接求解。
通常的解決方式是通過參數規整,利用鐘差、電離層延遲和模糊度等參數分別吸收部分偽距硬件延遲。相位硬件延遲與模糊度具有強相關性,且通常具有極高的時間穩定性,可被模糊度完全吸收[8]。
此外,觀測方程中的其他誤差項如衛星和接收機天線相位中心改正、測站對流層天頂干延遲、相對論效應、潮汐負荷形變(固體潮、極潮和海潮)、薩奈克效應和衛星天線相位纏繞等改正,均需事先通過模型改正[9]。
為了更好地描述參數規整,定義如下表達式
(1)

IGS精密衛星產品一般基于P1/P2無電離層組合觀測值估計,因此,其提供的衛星鐘差產品包含了雙頻P1/P2偽距觀測值UCD的線性組合,即


(2)

(3)

引入精密衛星軌道和鐘差改正,對原始觀測方程進行參數規整,線性化后可以得到標準雙頻非差非組合PPP模型,具體方程如下
(4)
(5)
(6)

該模型對應的待估參數X為
(7)
1.2 GLONASS非差非組合PPP模型
GLONASS采用頻分多址技術,需要考慮偽距頻間偏差的影響。在本文中考慮將頻間偏差模型化為頻率數的二次多項式函數。
GLONASS偽距頻間偏差可以表示為

(8)

(9)
該模型對應的參數向量X可表示為
(10)
后續模型中,GLONASS中的偽距頻間偏差都采用該處理策略。
1.3 北斗三頻非差非組合PPP模型
根據式(4)和式(5)可以得到北斗三頻非差非組合模型,但在第三個頻率上的偽距觀測值的碼間偏差(DCBr,13)無法被電離層參數完全吸收。所以需要在第三個頻率的偽距上引入一個額外的頻間偏差參數IFB,即
(11)
其中
(12)
IFB是B3頻率上的偽距頻間偏差,作為時間常數估計。
該模型的待估參數X為
(13)
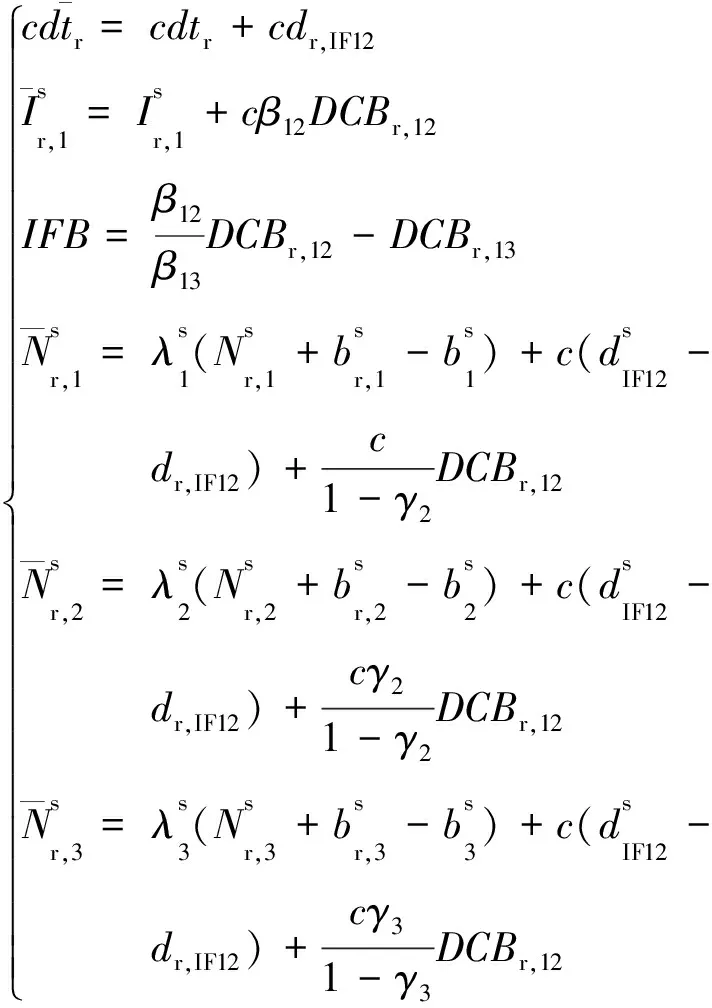
1.4 多系統混頻非差非組合PPP模型
將式(4)和式(5)擴展到多系統環境下,考慮IFB參數;引入ISB參數,以GPS接收機鐘差作為參考,可得到多系統混頻PPP模型,即
(14)
(15)
該模型對應的參數向量X可表示為

(16)
2 試驗及結果分析
本文采用開源軟件GAMP進行二次開發,并在其中擴展了多系統混頻PPP處理模塊[10]。
本節選取了JFNG、CUT0、NNOR、SIN1這4個站點在2018年5月(年積日為121~124)總計4d的30s采樣間隔的觀測數據進行實驗分析。實驗采用了德國地學研究中心提供的精密軌道和鐘差產品,衛星和接收機天線相位中心改正采用IGS絕對天線相位中心改正模型igs14.atx。由于BDS接收機端的天線相位中心改正不可用,因此用相應的GPS信號對應的接收機端天線相位中心改正替代。衛星截止高度角設置為10°。具體的PPP處理策略如表1所示。
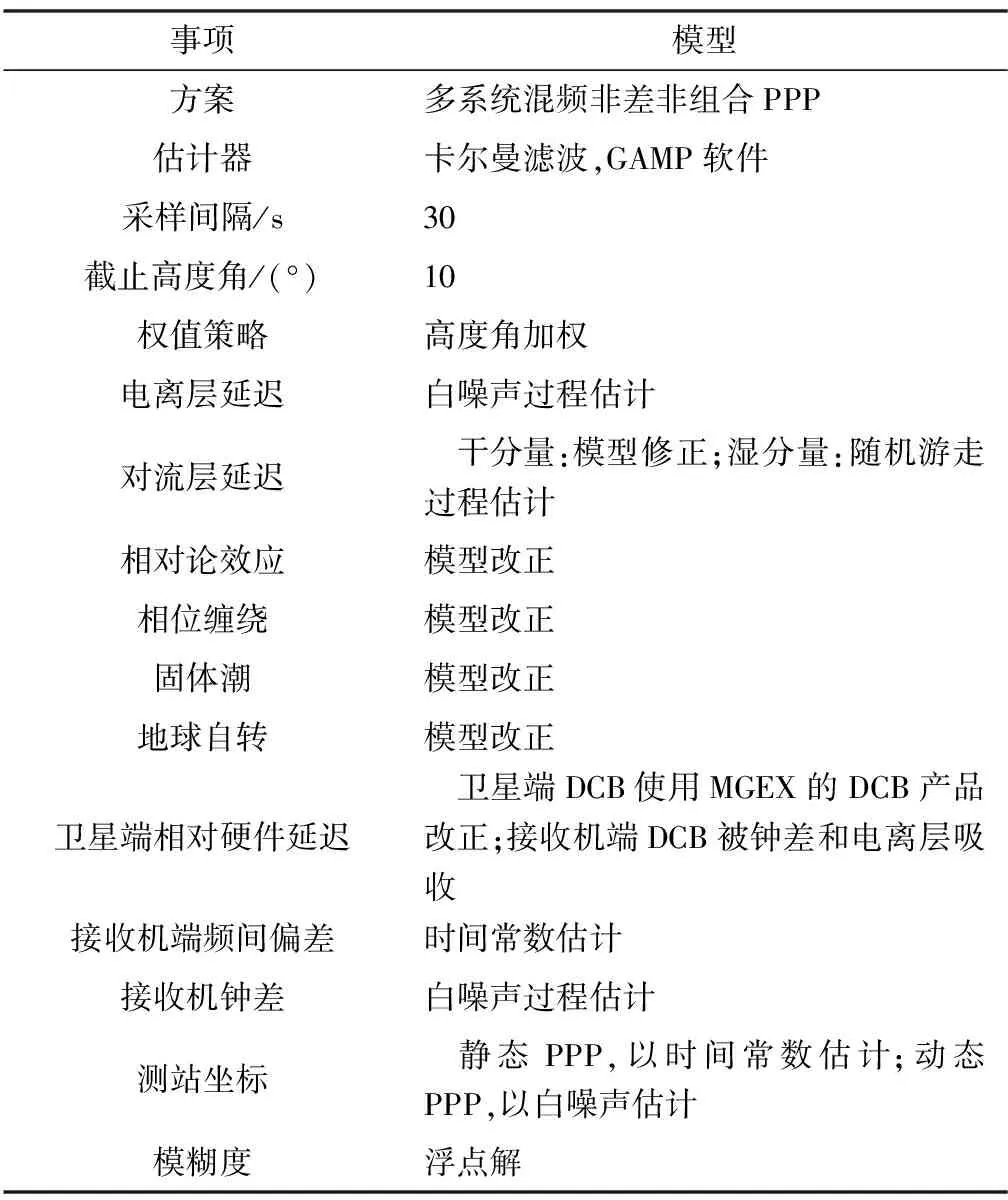
表1 多系統混頻PPP處理策略
2.1 靜態定位結果分析
由于雙頻非差非組合模型相比無電離層組合模型更有優勢,本節使用兩種模型進行靜態精密單點定位,一種是GPS+GLONASS+BDS雙頻非差非組合模型(簡稱為GRC-2),另一種為北斗三頻+GPS雙頻+GLONASS雙頻模型(簡稱為GRC-3)。圖1給出了4個測站兩種PPP定位模型下連續4d單天靜態定位精度均方根(Root Mean Square,RMS)的平均值。圖1中,橫坐標軸表示4個測站,縱坐標表示E、N、U方向平均RMS。從圖1中可以看出,兩種PPP模型在各測站的定位精度在E、N、U方向均優于4cm,GRC-3模型的定位精度優于GRC-2模型。具體分析可知,在JFNG與NNOR站點下兩種模型的定位精度幾乎沒有差距,這2個站點下的定位精度相較其余2個站點(CUT0、SIN1)更好,NNOR站點的E、N方向的定位精度達到了毫米級;CUT0、SIN1站點的定位精度稍差,SIN1站點GRC-2模型下E向的定位精度較差,達到了4cm,這種情況下,GRC-3模型下E向的定位精度有所提升。
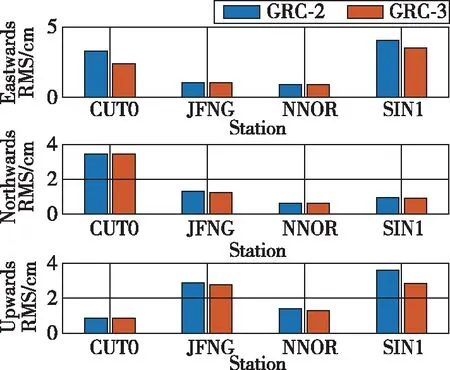
圖1 兩種PPP模型4個測站單天靜態定位平均RMS
表2統計了兩種PPP模型下4個測站連續4d單天靜態解的平均值。從表2的統計結果來看,相較于多系統雙頻非差非組合PPP模型,多系統混頻非差非組合PPP模型的定位精度有所提高,以單個測站為例,NNOR站點下兩種模型的定位精度在E、N方向達到毫米級,定位結果較好,GRC-3模型相較GRC-2模型的定位精度有所提升,但提升在5%以內,可以認為兩者精度相當。可以說,當GRC-2模型能取得良好定位精度時,使用GRC-3模型也能取得同水平的定位精度,但很難提升。SIN1站點的情況不同,該站點在E、U方向的定位精度在4個測站中是最差的,GRC-3模型的定位精度相較GRC-2模型取得了較大提升,在東向上提高了12.5%,在天向上提升了21.3%。可以看出,當GRC-2模型的定位結果較差時,GRC-3模型的定位精度會有明顯提高。從4個測站的RMS平均值綜合來看,GRC-3模型的定位精度相較GRC-2模型有所提高,在東向上提高了9.6%,北向上相當,天向上提高了11%。
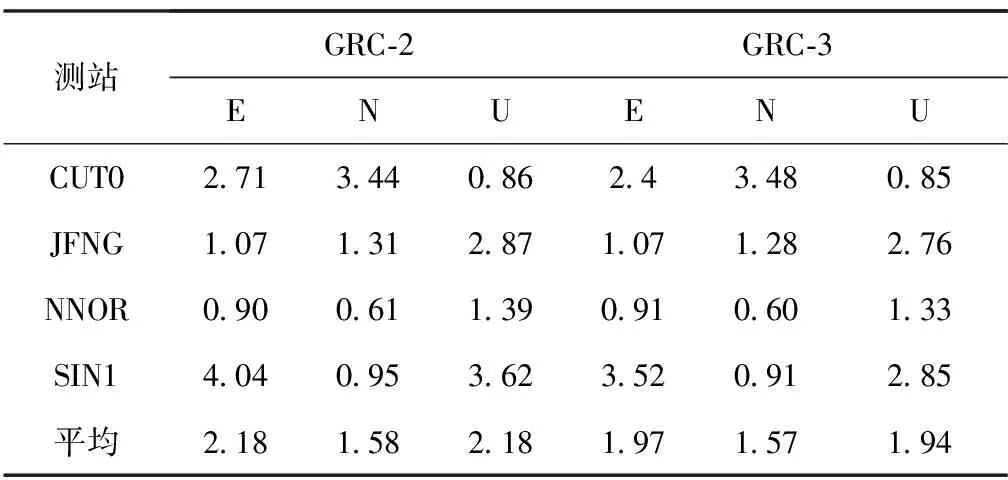
表2 兩種模型4個測站單天靜態定位RMS統計表
表3統計了4個測站的平均收斂時間,以E、N、U這3個方向定位偏差連續20個歷元均優于10cm時定義收斂。從表3中可以看出,兩種模型下4個測站的靜態定位平均收斂時間在15min左右,GRC-3模型下的收斂時間較GRC-2模型有所增長,收斂性能有所下降。這主要是因為使用GRC-3模型有更多待估參數,雖然提高了冗余度,但在定位的初始階段,待估參數更易受觀測方程病態性的影響,影響了GRC-3模型的收斂時間,并且GRC-3模型的數據處理時間也更長。
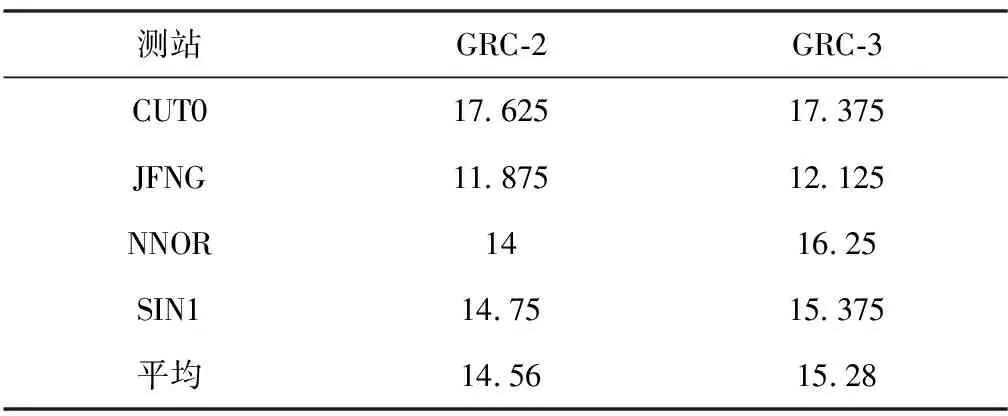
表3 兩種模型4個測站靜態定位收斂時間統計表
2.2 模擬動態定位結果分析
本節使用兩種模型進行偽動態精密單點定位,即解算測站坐標時使用白噪聲過程進行估計。圖2給出了4個測站兩種PPP定位模型下連續4d單天動態定位精度RMS的平均值。圖2中,橫坐標軸表示4個測站,縱坐標表示E、N、U方向平均RMS。從圖2中可以看出,除了SIN1站點,兩種PPP模型在各測站的定位精度在E、N、U方向均優于4cm,GRC-3模型定位精度優于GRC-2模型。在JFNG與NNOR站點下兩種模型的定位精度幾乎沒有差距,這2個站點下的定位精度相較其余2個站點(CUT0、SIN1)更好。CUT0和SIN1站點的定位精度稍差,SIN1站點GRC-2模型下天向的定位精度較差,達到了7cm,這種情況下,GRC-3模型下天向的定位精度有所提升。
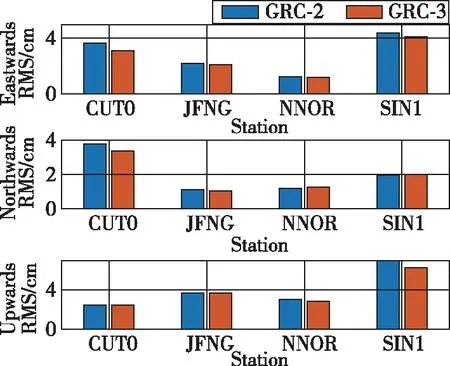
圖2 兩種PPP模型4個測站單天動態定位平均RMS
表4統計了兩種PPP模型下4個測站連續4d單天偽動態解的平均值。從表4的統計結果來看,同靜態結果類似,相較于多系統雙頻非差非組合PPP模型,多系統混頻非差非組合PPP模型的定位精度有所提高,從4個測站的RMS平均值綜合來看,在東向上提高了7.3%,北向上相當,天向上提高了5.7%。
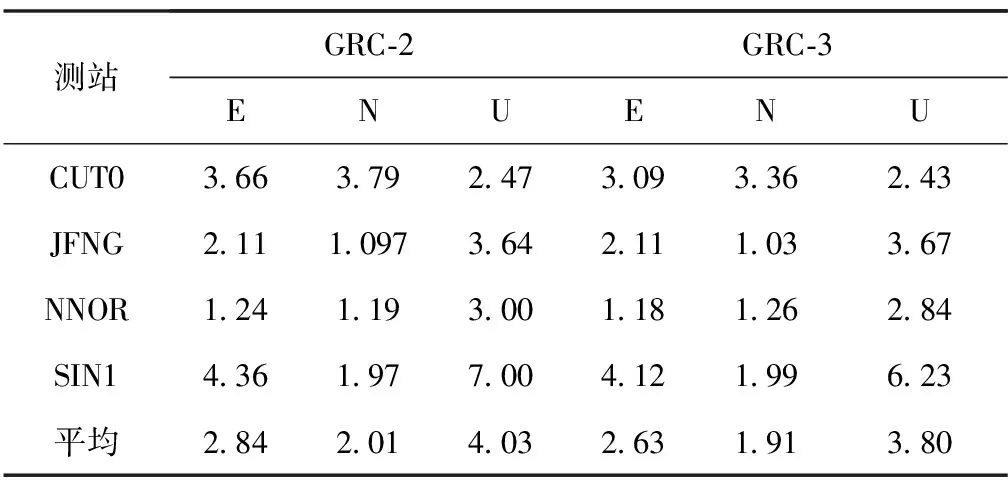
表4 兩種模型4個測站單天動態定位RMS統計表
表5統計了4個測站的平均收斂時間,以E、N、U這3個方向定位偏差連續20個歷元均優于10cm時定義收斂。從表5中可以看出,兩種模型下4個測站動態定位的平均收斂時間在23min左右,與靜態結果類似,GRC-3模型下的收斂時間相較GRC-2模型有所增長,收斂性能有所下降。
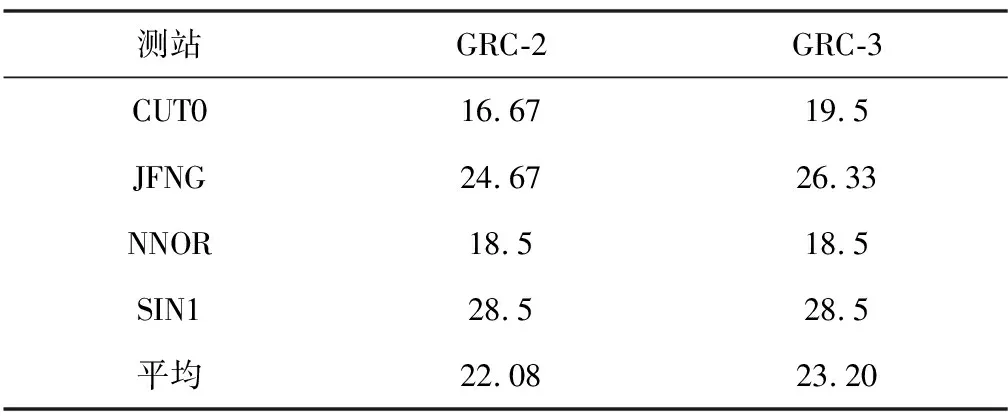
表5 兩種模型4個測站動態定位收斂時間統計表
3 結論
本文基于測站的觀測數據,主要從定位精度和收斂性方面,研究分析了多系統混頻非差非組合模型PPP的靜態及動態定位性能。
同多系統雙頻非差非組合PPP相比,多系統混頻非差非組合PPP的定位精度有所提高,靜態解RMS在東向提高了9.6%,北向相當,天向提高了11%;動態解RMS在東向提高了7.3%,北向相當,天向提高了5.7%,但多系統混頻PPP的收斂時間并沒有提升。
在多系統雙頻PPP因某一頻率異常導致定位精度較差時,多系統混頻PPP仍能保證較高的定位精度,由于本文實驗選用的觀測數據都從測站下載,質量較好。有理由可以相信,在使用質量稍差的觀測數據,如動態車載實驗的觀測數據時,多系統混頻PPP模型相較多系統雙頻PPP模型可以得到更好的提升。
綜上,多系統混頻PPP的定位性能有所提升,但收斂時間和解算速度還有待進一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19