量子密鑰分發系統中抗擾動偏振編碼模式的實驗研究*
2021-10-08 08:55:12沈琦琦張毅王金東於亞飛魏正軍張智明
物理學報 2021年18期
關鍵詞:實驗
沈琦琦 張毅 王金東 於亞飛 魏正軍 張智明
(華南師范大學信息光電子科技學院,廣東省量子調控工程與材料重點實驗室,廣州 510006)
基于移動設備的自由空間量子密鑰分發系統能夠為實時全覆蓋多節點網絡提供有效的解決方案,然而該系統目前依舊存在著穩定性不足的問題,偏振編碼器的抗擾動性在移動設備應用中非常重要.在擾動情況下保偏光纖的偏振保持特性將受到很大程度的影響,進而使得基于該特性的編碼器的穩定性也隨之受到影響.為解決擾動情況下偏振編碼的穩定性問題,本文提出了一種雙向差分調制模式,該種調制模式可以使基于雙向回路的偏振編碼器即使在擾動情況下依舊能夠實現穩定編碼.為此設計了雙向差分調制的原理驗證實驗,實驗在250 MHz的重復頻率下進行,并使用200 Hz的振動來模擬實際擾動環境,在實驗最后使用了商用雪崩型單光子探測器進行了持續2 h的測試,得到了在擾動情況下系統的平均量子比特誤碼率為0.36%,誤碼率波動范圍不超過0.2%.
1 引 言
量子密鑰分發(quantum key distribution,QKD)允許遙遠的兩個通信雙方,通常稱為Alice 和Bob,通過交換編碼在單光子上的量子比特來共享安全密鑰[1].OKD 與“一次一密”相結合,能夠在理論上保證通信的安全性[2,3].
自從1984 年第一個QKD 協議提出以來,眾多實驗已被公開報道[4?6].在光纖信道中,光纖損耗及器件不完美等原因將限制QKD的安全傳輸距離.而由于光在自由空間中的低散射損耗,基于衛星的QKD 系統[7?9]將有望為建立全球規模的量子網絡提供有效方法.進一步地,移動設備與衛星QKD 系統結合能夠實現QKD 網絡接入的靈活性,并且有助于構建全覆蓋低成本的QKD 網絡[10,11].
偏振編碼是QKD 系統的主要編碼方法之一,由于自由空間信道擁有良好的保偏性能,偏振編碼成為自由空間QKD[12?14]的最佳選擇.然而,現有的基于移動設備的自由空間QKD 系統仍存在穩定性不足的問題[15?17].一個具有長期穩定性和低量子比特誤碼率(quantum bit error rate,QBER)的偏振編碼器對于存在擾動的自由空間QKD 系統至關重要.現有偏振編碼器在穩定環境中已經表現出良好的性能[18?24],但在實際移動應用中將不可避免地會產生擾動,保偏光纖(polarization maintaining fiber,PMF)的偏振保持特性在擾動環境下將受到很大程度的影響,一些基于保偏光纖偏振保持特性的編碼器穩定性也將隨之受到影響.
因此,為了保證在擾動環境中偏振編碼的穩定性,本文提出了一種雙向差分調制模式,該模式可應用于雙向回路系統中,使得編碼器能夠保持長時間穩定編碼.為驗證該調制模式的可行性,將其應用于本課題組提出的偏振調制單元(polarizationmodulated unit,PMU)[25]中并進行了原理驗證實驗,結果表明,在頻率為200 Hz的擾動情況下該方案能夠保持良好的偏振穩定性.同時,針對高重復頻率情況下串擾對系統的影響問題,進一步提出了時域濾波和頻域濾波的方法以降低串擾的影響.
本文的安排如下:第2 節給出在200 Hz 擾動情況下PMF的偏振保持特性分析并提出雙向差分調制模式;第3 節結合PMU 對雙向差分調制模式進行原理驗證實驗,并針對串擾問題進行處理;第4 節給出系統在無擾動和有擾動情況下的穩定性測試結果,驗證了雙向差分調制模式的抗擾動特性;第5 節給出本文的結論.
2 雙向差分調制模式
由于一般機械振動的頻率在幾Hz 至500 Hz內,為了驗證偏振編碼器在實際場景中的穩定性,我們選擇了200 Hz的振動頻率來模擬常見的擾動情況,并測試了PMF 在該頻率擾動下的偏振保持特性.在實驗中,首先使用1 個能夠輸出在PMF快軸和慢軸上均有分量的確定線偏振態的激光器(LD100-D)作為光源,使用偏振分析儀(DPC5500)作為偏振檢測裝置,兩個設備之間僅使用一根PMF 連接,同時在固定PMF的平面上施加200 Hz的低頻振動.在連續30 min的測試中,PMF的偏振變化如圖1(a)所示,可以發現,在存在擾動的情況下,光在PMF 快軸和慢軸上均有投影時其偏振態將產生較大偏移.隨后,還測試了在擾動情況下光僅沿PMF 慢軸傳輸的情況.在實驗中,用另一個激光器(KG-ELD-C33-10-M-FA)代替光源,該激光器輸出光的偏振態僅在PMF的慢軸上傳輸,測試結果如圖1(b)所示,由測試結果可知,光即使僅在PMF 一個軸上進行傳輸,但是在擾動情況下依舊無法很好地保持偏振狀態.
我們知道對于一些基于PMF 保偏特性的編碼器來說,需要被調制的脈沖分量僅在相位調制器(phase modulator,PM)一個軸上進行傳輸[18,19]或該脈沖在PM 兩個軸上的投影分量相同[20,21],然而如圖1的測試結果所示,當PMF 在擾動環境下,其保偏特性將受到很大程度的影響,進而導致基于該特性的偏振編碼器穩定性不可避免地也受到影響.因此,本文提出一種基于法拉第鏡(Faraday mirror,FM)回路的雙向差分調制模式,在該調制模式下,被調制的分量脈沖往返經過偏振無關PM時,PM 對該部分分量施加兩次完全相同的電壓,使得PM 對該分量脈沖施加的總相位相同,進而實現穩定調制.接下來對雙向差分調制進行理論分析.
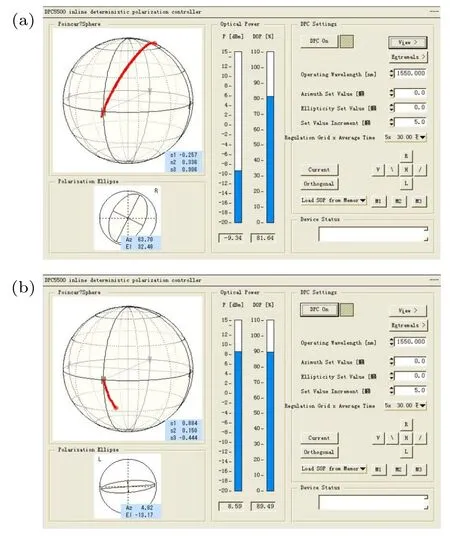
圖1 PMF 在擾動環境下的測試,圖中紅線表示偏振態在邦加球上的變化軌跡 (a) 在擾動情況下,光在PMF 快軸和慢軸上均有分量的偏振態變化;(b) 在擾動情況下,光僅在PMF 慢軸上傳輸時的偏振態變化Fig.1.Testing of the PMF under a disturbance,the red line represents the change in the polarization state on the Poincare sphere:(a) Polarization state change with components on both the fast axis and the slow axis of the PMF under a disturbance;(b) polarization state change when light transmits only along the PMF slow axis under a disturbance.
首先,如圖2 所示,對于大部分的相位調制偏振編碼器而言,均需要保證輸入到編碼器的光脈沖偏振態為

圖2 相位調制偏振編碼方案Fig.2.Phase modulation polarization coding scheme.

其中|H〉和|V〉分別表示光子的水平和豎直偏振態.隨后,脈沖經偏振分束器(polarization beam splitter,PBS)分成兩個正交的偏振態,其中假設|V〉為需要被調制的分量.在穩定情況下,|V〉經PMF 傳輸到達PM 時,其偏振態不會發生變化,經過PM 后,該分量變為

其中φ表示PM 對|V〉分量加載的相位.如(2)式所示,PM 調制的電壓將全部加載在|V〉分量上,由于此時從PBS 分束后的兩分量脈沖振幅相同、偏振態正交且存在固有相位差,因此當兩分量脈沖耦合時,其輸出的偏振態將僅由PM 施加的相位決定.
然而在擾動情況下,PMF的偏振保持特性將受到很大程度的影響,此時如果不考慮偏振相關損耗,則到達PM的|V〉分量脈沖將會變為

其中 cosθ和 sinθ分別表示由于擾動導致|V〉分量脈沖的偏振變化后在PM 兩軸上的投影分布,滿足|cosθ|2+|sinθ|2=1;φ′表示脈沖在傳播過程中兩分量之間引入的附加相對相位,隨后經PM 調制得到

其中φo和φe分別表示對偏振無關PM 施加電壓時,對o 光和e 光引入的相移.由于偏振無關PM對o 光和e 光有不同的調制效率,因此有φeφo.
而另一分量脈沖|H〉的偏振態也將發生隨機變化,若此時兩分量脈沖進行耦合,得到耦合后的脈沖偏振態也將隨機地發生變化.
同樣地,若此時使用的是基于FM的雙向回路系統,如PMU 方案[25].如圖3 所示,脈沖經過FM返回至PBS 時,該回路結構能夠自動補償光纖中的偏振態變化,但是當該脈沖經過PM 時,該分量在PM 兩軸上均有投影,而此時PM 對該脈沖兩軸上的分量施加的相位和比例均不同,因此即使最終由于FM 自補償特性將光纖中的偏振變化補償回來,但該分量被PM 調制的相位將會持續變化,這也將導致兩分量耦合輸出的偏振態產生隨機變化.
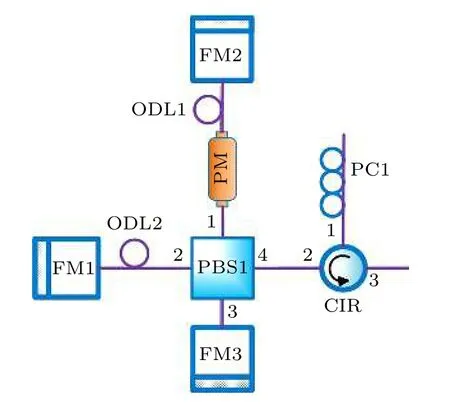
圖3 PMU 結構示意圖Fig.3.PMU structure diagram.
對于雙向差分調制模式而言,在FM 回路系統中,通過控制時域調制信號,使得被調制的分量脈沖往返經過PM,PM 會對其施加兩次完全相同的調制電壓,具體調制方式如下.
在擾動情況下|V〉分量脈沖到達PM 被調制后,其偏振態變化如(4)式所示,隨后該分量脈沖將繼續沿光纖傳輸到達FM 處,被FM 操作,FM的作用算符為P?FM=|H〉〈V|+|V〉〈H|,隨后反射再次回到PM 處,此時該分量偏振態變化為

隨后再次經過PM,在雙向差分調制模式下,還需要對PM 再次施加相同的電壓,此時得到該分量偏振態變化為

由于FM的自補償特性,該脈沖再次返回到達PBS 時,其偏振態變化為

由(7)式可知,當兩脈沖分量耦合時,輸出的偏振態將僅由PM 加載兩次相同電壓得到的(φe+φo)決定.即在雙向差分調制模式下,由于擾動的存在使得光脈沖經過光纖和PM 時,即使脈沖分量的偏振態產生了隨機變化,但是憑借FM 自補償特性及控制PM 在時域上的調制,即可實現穩定編碼.
3 實驗設置
PMU 是目前基于FM 回路系統非常穩定的編碼器,根據編碼器內部使用的光纖類型不同分為偏振相關調制和偏振無關調制模式[26]兩種,這里以PMU 為例,將雙向差分調制模式應用于PMU 中并進行實驗實現.對于雙向調制模式而言,無論PMU內部使用單模光纖(single-mode fiber,SMF)還是PMF 均能夠實現穩定編碼.
實驗設置如圖4 所示.一個高速皮秒脈沖激光器(LD100-D)輸出一個波長為1550.15 nm的光脈沖,脈寬為100 ps,激光器輸出后連接一個隔離器,以避免反射光進入激光器,隨后經過一個手動偏振控制器(polarization controller,PC),調整輸入到PMU的脈沖偏振態,然后經光環形器輸入到PMU中.進入編碼器后,光脈沖首先經過一個PBS,分為互為正交的兩部分分量從PBS的兩個端口輸出,隨后經過兩個50∶50的分束器,分束器一端輸出連接光功率計,用以實時監控輸入偏振態的變化,另一端繼續連接光路.3 個FM 用于將輸入的光脈沖旋轉至正交態反射回去,形成自補償回路,PM 由1 個電脈沖發生器(EPG-210)和1 個射頻放大器(DR-DG-12-MO)共同驅動,用以對目標光脈沖調制相位,兩條光延遲線(optical delay line,ODL)用于調整從PBS 分離出的兩個光脈沖的時間間隔,以及同一脈沖兩次經過PM的時間間隔.光脈沖完成編碼輸出后,首先經過1 個光濾波器(filter,FI),將可通過的光波長范圍調整至中心波長附近,用以降低系統串擾的影響.隨后,采用可變衰減器將光脈沖的平均光子數降至單光子量級,然后經量子信道進行傳輸.PC 用于校準Alice 和Bob 之間的參考系,單光子探測器(single-photon detector,SPD)用于檢測單光子信號.
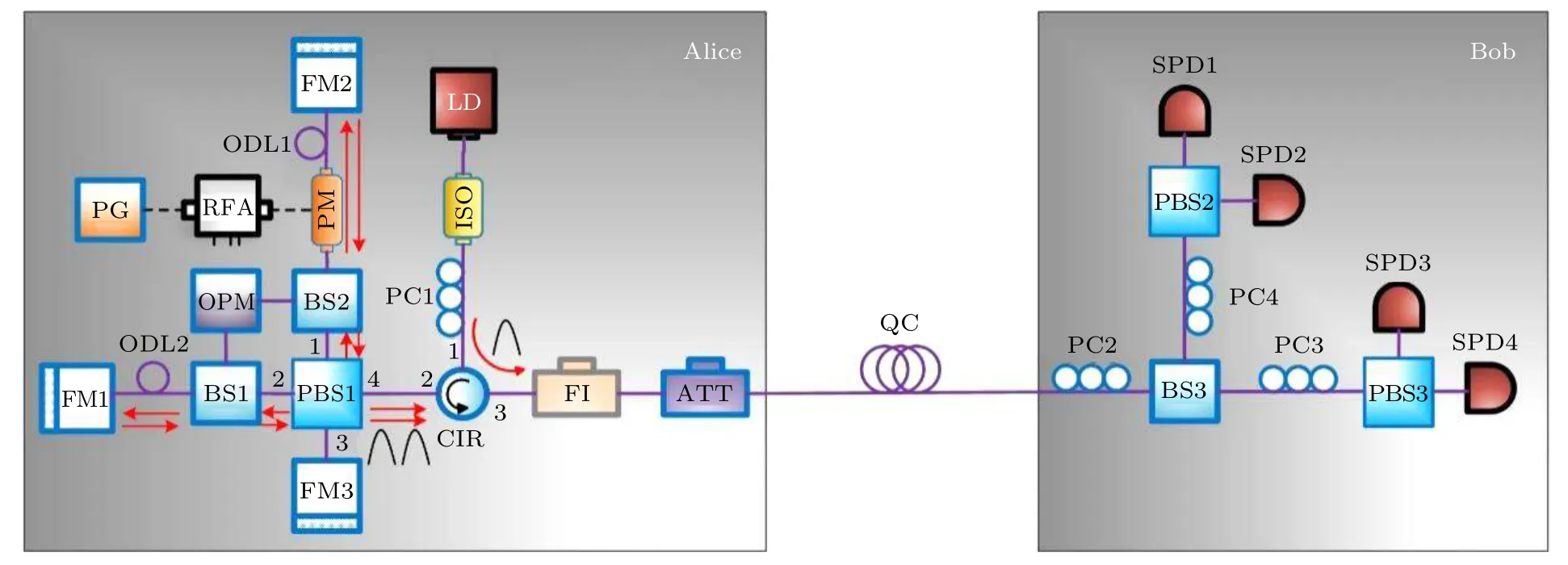
圖4 雙向差分調制模式在PMU上的應用,圖中紅色箭頭表示串擾的方向.LD,激光二極管;ISO,隔離器;PC,偏振控制器;CIR,光環形器;PBS,偏振分束器;BS,分束器;PM,相位調制器;ODL,光延遲線;FM,法拉第鏡;OPM,光功率計;PG,電脈沖發生器;RFA,射頻放大器;FI,濾波器;ATT,衰減器;QC,量子信道;SPD,單光子探測器Fig.4.Application of two-way differential modulation mode to PMU,the red arrow in the figure indicates the direction of crosstalk.LD,laser diode;ISO,isolator;PC,polarization controller;CIR,optical circulator;PBS,polarization beam splitter;BS,beam splitter;PM,phase modulation;ODL,optical delay lines;FM,Faraday mirror;OPM,optical power meter;PG,electrical pulse generator;RFA,radio-frequency amplifier;FI,filter;ATT,attenuator;QC,quantum channel;SPD,single photon detector.
該實驗關鍵是需要對編碼器中各脈沖時序進行精確調節.首先對于雙向差分調制而言,需要對被調制的脈沖經過PM 時加載兩次完全相同的電壓,此時有兩種調制方法.首先,可以使得光脈沖分量往返經過PM 時均由同一電脈沖信號進行加載,此時需要該電脈沖信號足夠寬或脈沖往返經過PM的時間足夠短才行,然而寬的電脈沖信號需要系統降低重復頻率,而往返經過PM 時間足夠短則對器件尾纖有嚴格的要求,因此本文暫不考慮該種調制方法.其次也可以通過電脈沖倍頻的方法進行調制,即將電脈沖的頻率倍頻到光脈沖頻率的2 倍,通過調整ODL1的長度,使得脈沖往返經過PM的時間恰好被不同的電脈沖所調制,然后通過控制這兩個電脈沖使得電壓相等以實現調制.隨后,對于PMU 而言,為實現編碼,需要保證從PBS分束的兩個脈沖之間存在固有相位差,因此還需要調節ODL2的長度,使得一個分量被PM 調制兩次,另一分量完全不被調制.
該實驗由于使用的SPD 是工作在門控模式下的商用InGaAs/InP 單光子探測器,其門控頻率固定為1.25 GHz,因此需要將系統重復頻率設置為1.25 GHz的整數分之一,在這里設置為250 MHz.同時為實現雙向差分調制,電脈沖頻率需為系統重復頻率的2 倍,此處設置為500 MHz,并通過調節ODL1的延時,使得脈沖分量往返經過PM的時間間隔為22 ns,此時僅需要控制第n個和第(n+11)個電脈沖電壓值相同即可.而兩脈沖分量之間的相對延時也通過ODL2 調整至0.9 ns,可保證PM 加載電壓時,另一脈沖完全不被PM 調制到.在這里,所有器件都通過SMF 連接,在環形器之前,使用PC 控制輸入偏振態,隨后對PM 施加四種不同的電壓來調制45°偏振態|D〉、–45°偏振態|A〉、右旋偏振態|R〉和右旋偏振態|L〉.
此外,在系統重復頻率較高的情況下,串擾對系統影響的概率將會增大,如圖4 中紅色箭頭所示,由于器件的不完美系統將會產生額外的串擾.串擾主要來源于從CIR的P1端口輸入直接從P3端口輸出的部分脈沖,以及分別從PBS的P1和P2端口輸出經FM 反射后直接從PBS的P4端口輸出的脈沖.在系統高重復頻率的情況下,該部分串擾將有很大概率會與信號光一起被SPD 檢測到,從而導致系統誤碼率上升.因此,本文提出兩種方法來解決串擾帶來的影響.首先,由于從CIR 引入的串擾不會進入編碼器內部而是直接進入信道中傳輸,以及經過PBS 引入的兩部分串擾也僅經過編碼器中的一條光路輸出,因此可通過調整編碼器內部的延時,在時域上將信號光與串擾光脈沖分離開,降低串擾的影響.此外,還可以使用FI 濾除除中心波長以外的其他波長,減少串擾的影響.本研究采用時域濾波和頻域濾波兩種方法濾除了系統約70%的串擾脈沖.在未來,將可以通過更加準確地調整編碼器中光纖的長度以消除幾乎所有的串擾的影響.
4 結果與討論
在這個原理驗證實驗中,首次將雙向差分調制模式應用到PMU,分別在無擾動和有擾動環境下進行實驗.
整個實驗裝置安裝在室內光學平臺上,除實驗室空調外,沒有額外的溫度控制.實驗結果如圖5(a)所示,其中SPD的固定探測門寬為300 ps,每個門內的平均暗計數率為 1.1×10?6,100 ns 死時間,檢測效率約為23.6%.接下來,進行了持續2 h的測試,在沒有額外控制的情況下得到系統平均QBER 為0.39%.而在調制四種偏振態時,施加在PM 上的電壓值大小不同,調制|D〉態時加載的電壓為0,此時QBER 最低僅有0.16%;而在調制|A〉時加載的電壓值最大為Vπ,得到的QBER 最大為0.52%;同樣地,在調制|R〉時其電壓為負,大小與調制|L〉時相同,即調制|L〉和|R〉時所施加的電壓分別為,這兩種態的QBER 都為0.43%.
接下來對編碼器施加一個200 Hz的振動,在持續施加振動情況下進行了連續2 h的實驗.實驗結果如圖5(b)所示,可以看出,即使存在擾動,在雙向差分調制模式下PMU 依舊能夠保持長時間的穩定.實驗結果與無擾動情況類似,因為調制四種偏振態時PM 施加的電壓不同導致編碼出的四個態QBER 也不同,|D〉,|A〉,|L〉和|R〉四種偏振態對應的平均QBER 分別為0.17%,0.50%,0.39%和0.38%,系統總平均QBER 為0.36%,而系統誤碼率的波動也保持在0.2%以內.
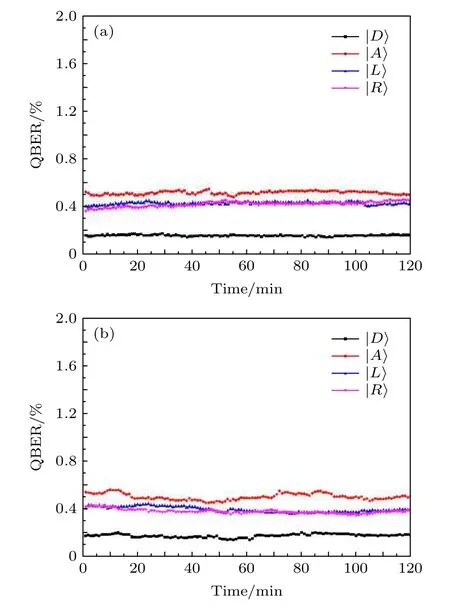
圖5 在PMU 雙向差分調制模式下,持續2 h 測試得到的|D〉 ,| A〉 ,| L〉 ,| R〉 四種偏振態的QBER (a) 無擾動情況下的QBER;(b) 200 Hz 振動情況下的QBERsFig.5.Measured QBERs of the four polarization states(|D〉,|A〉 ,| L〉 ,| R〉) for two hours under the two-way differential modulation mode applied to PMU:(a) QBERs in an undisturbed environment;(b) QBERs under a 200 Hz vibration environment.
該實驗在光脈沖輸入到PBS 之前使用了SMF連接.并且使用了手動PC 來控制偏振狀態,這不可避免地會導致輸入的偏振態無法很好地鎖定.在未來可以將編碼器應用于自由空間OKD 中,在自由空間信道中光子偏振態能夠很好地保持,同時編碼器本身具有強抗擾動特性,兩者結合將有望解決基于移動應用的自由空間QKD 穩定性不足的問題.
5 結 論
PMF的偏振保持特性在擾動情況下將受到很大程度的影響,現有的基于PMF 偏振保持特性的偏振編碼器的穩定性也會受到擾動的影響.因此本文首先討論了在擾動情況下基于PMF 保偏特性的編碼模式的穩定性,隨后提出了一種能夠在擾動情況下實現穩定編碼的雙向差分調制模式,并將該模式應用于PMU 進行了實驗實現.實驗結果表明,基于雙向差分調制模式的PMU 能夠在擾動環境下保持長期穩定編碼,在擾動情況下系統的平均誤碼率為0.36%,誤碼率波動范圍不超過0.2%.雙向差分調制模式未來可應用于基于移動應用的QKD 中,為構建實時全方位覆蓋的多節點網絡提供了有效解決方案.
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55