基于特征放大的小波反應堆CRDM動作檢測
2021-10-09 09:44:34徐鳴睿朱振杰霍孟友李建偉
自動化儀表 2021年9期
徐鳴睿,朱振杰,霍孟友,李建偉
(1.山東大學機械工程學院,山東 濟南 250100; 2.山東核電有限公司,山東 煙臺 264010)
0 引言
控制棒驅動機構(control rod drive mechanism,CRDM)是用于驅動控制棒的裝置,是反應堆內的核心部件。反應堆通過控制棒驅動機構來實現對控制棒的提升與插入,從而控制反應堆功率以及反應堆安全啟停。
目前,國內核電站廣泛采用了磁力驅動型CRDM[1]。該CRDM通過三組線圈的交替配合來實現控制棒的步進運動。如果控制棒行進過程中鉤爪動作出現異常,可能導致控制棒無法到達預期的位置,嚴重時甚至會導致控制棒意外下落[2-3]。線圈電流上的動作點可用于識別該故障,但是國內核電站中普遍缺少對該動作點的監測手段,因此設計一種對控制棒驅動機構線圈電流上動作點進行可靠檢測的方法極其重要。針對控制棒驅動機構線圈電流的動作點檢測問題:文獻[4]提出對動作點部分進行微分,判斷是否有小于零的值,但要求電流曲線及動作點處于較為理想的條件下;文獻[5]提出使用小波變換對動作點進行識別,經小波分解后的信號在第五層可較為明顯地看出動作點與非動作點的差異,但是其差異度不是很高,易受到噪聲的干擾,辨識存在風險。
為實現對控制棒驅動機構線圈電流動作點的可靠檢測,本文設計了基于特征放大的小波檢測算法。首先,對控制棒驅動機構線圈電流上升段建立模型,通過建立的模型突出動作點的特征,實現對動作點的特征放大;然后,對特征放大后的動作點進行小波分解檢測。檢測結果表明,這種方法相較于相同條件下的小波變換具有更好的辨識度。
1 控制棒驅動機構結構及動作原理
控制棒驅動機構包含有驅動軸、鉤爪、銜鐵、線圈等部件。控制棒驅動機構結構如圖1所示。一組控制棒驅動機構中包含有提升線圈、鎖緊線圈、固定線圈各一個,磁通環與線圈構成電磁鐵,電磁鐵的通電與否可用于控制鉤爪的運動,三個線圈按一定的時序密切配合,實現驅動棒的提升與插入[6]。以提棒為例:當需要將驅動軸提升一步時,先是鎖緊線圈通電,使鎖緊鉤爪抱住驅動軸;然后固定線圈斷電,使固定鉤爪脫離驅動軸;最后提升線圈通電,將鎖緊鉤爪連同驅動軸一起向上提升一步。
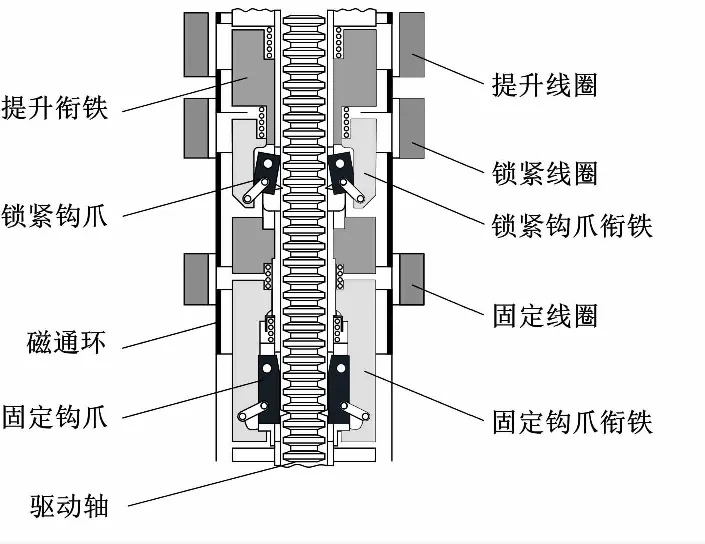
圖1 控制棒驅動機構結構示意圖
因為驅動軸的提升與插入需要各個部件之間的密切配合,所以稍有差錯即可能導致相應的鉤爪動作失敗。其在控制棒驅動機構線圈電流圖上表現為動作點的缺失。正常情況下,線圈電流增大,鉤爪會產生相應的動作。而鉤爪產生動作后會引起磁通量的減小,造成線圈電感增大、電流減小,并在線圈電流圖上產生一個類似于回溝的動作點[7]。一旦出現異常,該動作點將會消失。正常狀態下,控制棒驅動機構提升一步線圈電流如圖2所示。
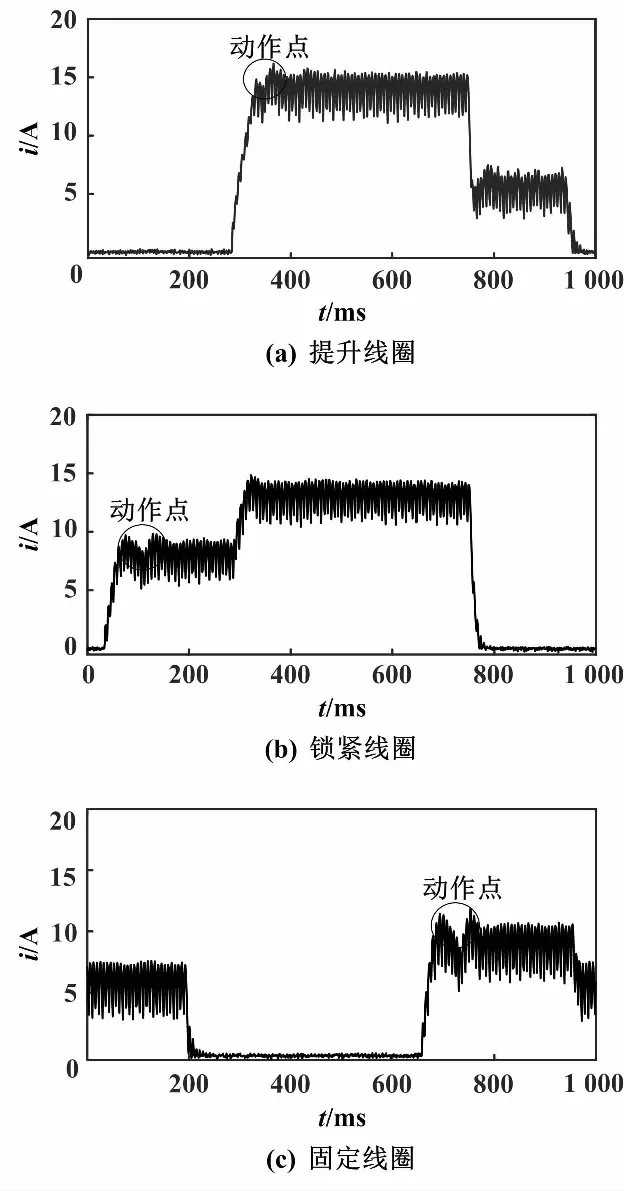
圖2 提升一步線圈電流(正常狀態)
以提升一步時的提升線圈為例,異常狀態提升一步線圈電流如圖3所示。
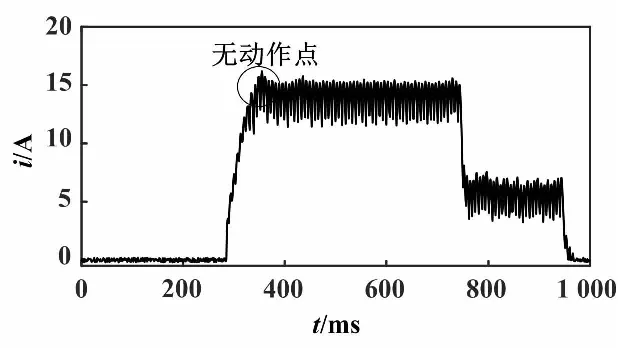
圖3 提升一步線圈電流(異常狀態)
2 檢測原理
對控制棒驅動機構線圈動作點的檢測方法是小波奇異點檢測,通過檢測后的結果來判斷控制棒驅動機構的動作是否成功。
通常將信號奇異點分為兩類。第一類奇異點是信號幅值在某時刻發生變化,在該處產生一個奇異點,信號不再連續。第二類奇異點是信號的一階微分產生突變,但原始信號仍然是連續的[8]。
對信號的奇異點進行檢測就相當于在不同尺度上對信號進行“磨光”,本質是對原始信號進行濾波,然后對“磨光”后信號的一階或者二階導數的零點或者極值點進行檢測。
信號奇異點檢測的原理如下。
設f(t)是k(t)和g(t)的卷積。
f(t)=k(t)?g(t)
(1)
根據傅里葉變換的性質可得:
F[f′(t)]=F[k′(t)]G(ω)=F[g′(t)]K(ω)
(2)
式中:G(ω)和K(ω)分別為g(t)和k(t)的傅里葉變換。
進一步微分可得:
f′(t)=k′(t)?g(t)=g′(t)?k(t)
(3)
根據式(3)可知,如果將k(t)作為原始信號,將g(t)作為濾波器,則原始信號與濾波器導數的卷積與濾波器與原始信號的卷積相同。因此,原始信號經過小波變換后的突變點或者極值點與原始信號的奇異點相對應,可以利用小波變換來檢測信號的奇異點。
使用θ(t)表示“磨光”函數,θ(t)起到低通濾波的作用,通常使用高斯函數或者B-樣條函數,且一般滿足如下的條件:

(4)
(5)
設θ(t)為二次可導函數,有如下定義:
(6)
(7)

(8)
(9)

根據式(8)和式(9)可知,尺度因子s的大小對小波函數平滑后的結果有顯著的影響。當尺度因子s較小時,小波函數對原始信號k(t)的奇異點的平滑效果較小;當尺度因子s較大時,小波函數對原始信號k(t)的平滑效果比較明顯,k(t)較小的奇異點將會被平滑掉,只有較大的奇異點將會被保留。由此可知,當小波函數為某一平滑函數的一階導數時,原始信號經小波變換后呈現的局部極值與原始信號的奇異點對應;而當小波函數為某一平滑函數的二階導數時,原始信號經小波變換后呈現的過零點與原始信號的奇異點對應[9-10]。
3 檢測模型
如圖2所示,所有動作點均出現在上升段末端,且提升線圈中的動作點幅度最小,難以識別。如果對局部信號特征進行放大,就可以很容易地對動作點進行辨識。現以提升線圈為例:對提升線圈電流信號進行濾波以及后續建模后,使用基于特征放大的小波變換識別控制棒驅動機構的動作。
3.1 線圈電流濾波
由于采集到的線圈電流信號中包含較多的噪聲信號,為防止噪聲信號對動作點分析的影響,在進行小波分析前,需要對線圈電流信號進行數字濾波。
對信號的頻譜進行分析,發現電流信號的有效部分主要集中在信號的低頻段。提升線圈電流信號頻譜如圖4所示。
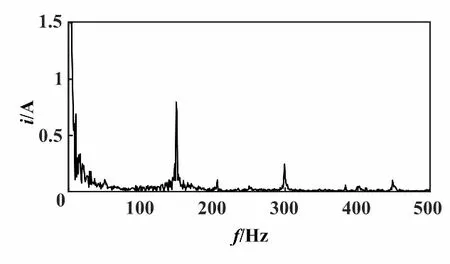
圖4 提升線圈電流信號頻譜圖
對電流信號采取低通濾波,選用切比雪夫I型數字低通濾波器,通帶截止頻率選擇為28 Hz,阻帶截止頻率選擇為33 Hz。經過低通濾波后,大部分噪聲被濾除干凈,剩下部分噪聲未對動作點部分形成明顯的影響,動作點能較為清晰地顯示。提升線圈電流濾波信號如圖5所示。
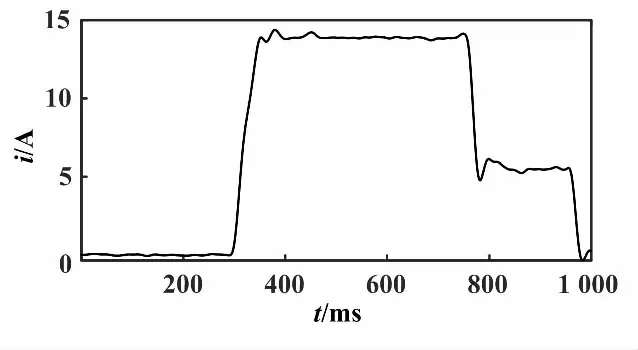
圖5 提升線圈電流濾波信號
為保證算法識別的準確性,僅對信號的上升段進行分析。首先對提升線圈包含動作點部分的上升段進行截取,截取部分為圖5中300~380 ms的曲線。由此獲得的提升線圈電流上升段如圖6所示。
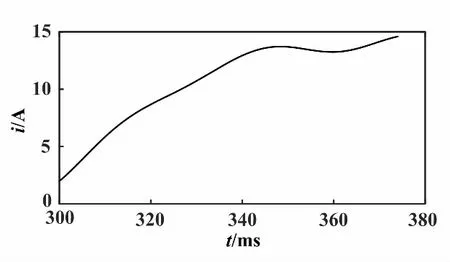
圖6 提升線圈電流上升段示意圖
3.2 電流上升段模型構建
控制棒驅動機構電路如圖7所示。圖7中:R為工作線圈的內阻;L為線圈的等效電感;VT1為逆變管,用于控制電流時序;VT2為斬波管,用于控制電流的大小;R0為一個耗能電阻。當VT1和VT2都不導通時,R0可用于釋放工作線圈中產生的自感電動勢[11]。
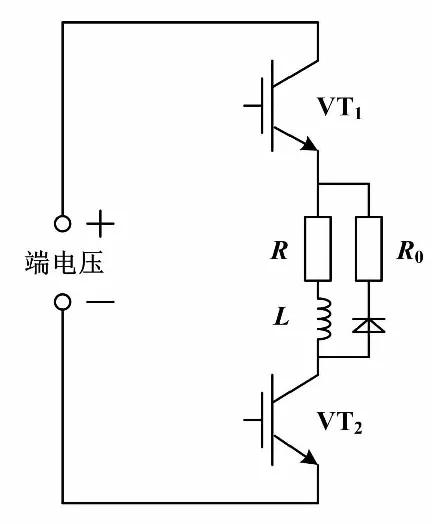
圖7 控制棒驅動機構電路圖
根據圖7所示的電路圖,由基爾霍夫電壓定律可得到相應的電路方程:
(10)
式中:E為線圈的電壓;L為磁路的等效電感;I為線圈上的電流;R為線圈的等效電阻;x為線圈位移。
因為磁路的電感值會隨著線圈的移動而發生改變,所以磁路的等效電感L是一個以線圈位移x為自變量的函數。
在線圈電流上升的初段,線圈的位置不變。此時,若假設L的值不發生變化,則式(10)可以簡化成式(11)。
(11)
式(11)為一個零狀態響應方程,可以推得線圈電流的大小為:
(12)
當線圈電流信號中不包含動作點時,表示鉤爪的動作沒有完成。此時,線圈的位置沒有發生變化,即電感值也沒有改變。所以可以根據推導出的線圈電流計算式,對線圈電流上升段曲線進行擬合,最終得到線圈電流上升段模型。

(13)
將擬合得到的模型與無動作點信號的上升段進行比較,得到的無動作點上升段模型與實際無動作點上升段對比如圖8所示。由圖8可以看出,構建的模型能較好地擬合無動作點電流上升段曲線,表明建立的無動作點線圈電流上升段模型是準確的。
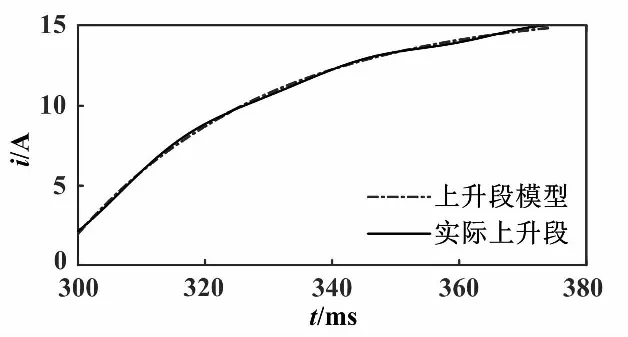
圖8 無動作點上升段模型與實際無動作點上升段對比圖
3.3 模型構建
含動作點的線圈電流信號和無動作點的線圈電流信號之間的差值就是動作點信號,與高斯函數的一階導數相似。使用高斯函數的一階導數來擬合動作點,數學表達式如下:
(14)
式中:a為信號的幅值;μ為信號相對于y軸的偏移量;σ為信號的平緩程度。
根據實際信號,可以計算得到a=3.4、μ=53、σ=10。
將得到的動作點模型與前面建立的無動作點的上升段模型進行疊加后,構建含動作點電流曲線上升段模型。將模型與圖6中的含動作點電流上升段進行對比,得到的含動作點上升段模型與實際含動作點上升段對比如圖9所示。
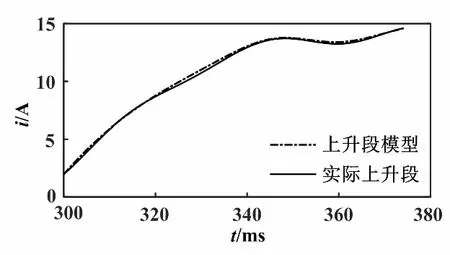
圖9 含動作點上升段模型與實際含動作點上升段對比圖
由圖9可以看出,構建的含動作點電流上升段模型能較好地擬合含動作點電流上升段曲線,表明建立的含動作點線圈電流上升段模型是準確的。同時,含動作點電流上升段曲線的動作點部分可通過建立的模型進行特征放大。
3.4 檢測結果對比分析
利用無動作點電流上升段模型,對動作點部分進行特征放大,使用含動作點電流上升段曲線減去已建立好的無動作點電流上升段模型,也就是“放大”后的動作點部分。含動作點上升段與無動作點上升段對比如圖10所示。
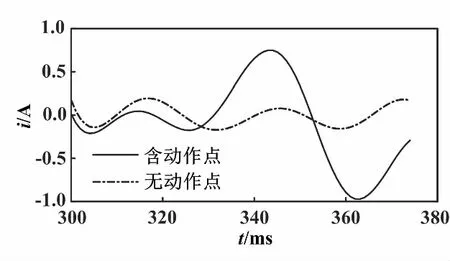
圖10 含動作點上升段與無動作點上升段對比圖
為驗證算法效果,在MATLAB平臺中選用小波基函數sym2對特征放大后的動作點部分使用小波變換,得到的小波分解第五層高頻系數結果對比如圖11所示。
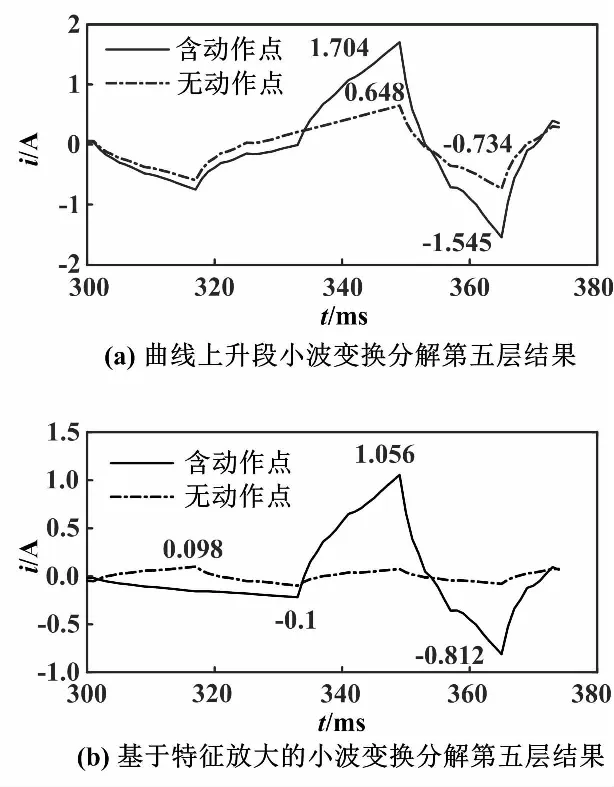
圖11 小波分解第五層高頻系數結果對比圖
為便于對結果進行分析,將小波變換后曲線中最大幅值與最小幅值之間的差值定義為該曲線的幅值差,將相同條件下含動作點曲線的幅值差與無動作點曲線的幅值差之比定義為動作點的辨識度。辨識度越大,含動作點曲線與無動作曲線間的差異就越大,可設定的辨識度閾值范圍也越大。這就能更方便地分辨兩種曲線,表明對動作點的檢測更可靠。
由圖11可知,基于特征放大的小波變換中含動作點曲線的幅值差為1.056 A-0.812 A=1.868 A,無動作點曲線的幅值差為0.098 A-(-0.1 A)=0.198 A,可算得基于特征放大的小波變換中動作點的辨識度為1.868÷0.198=9.43。同理可算得小波變換中動作點的辨識度為3.249÷1.382=2.35。兩種方法的小波分解比較結果如表1所示。
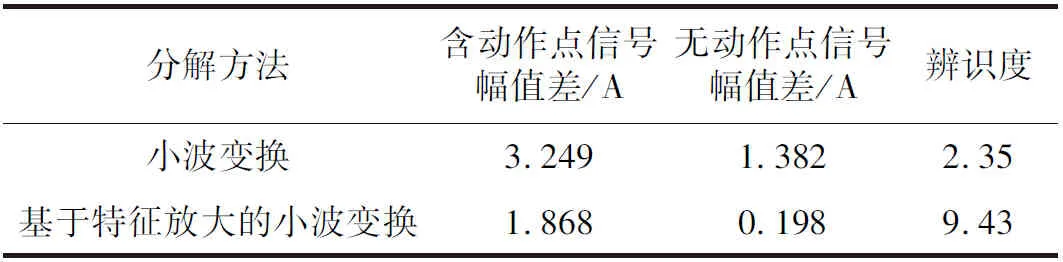
表1 兩種方法的小波分解比較結果
由表1可知,使用基于特征放大的小波變換動作點檢測方法后,動作點的辨識度由2.35提升至9.43,辨識度閾值范圍由1~2.35提升至1~9.43。因此,可在辨識度1~9.43的范圍內選取一個合適的辨識度閾值,即可將含動作點信號與無動作點信號較為容易地區分開來。由此可見,與純小波變換動作點檢測方法相比,基于特征放大的小波反應堆CRMD動作檢測方法有更高的辨識度及更大的辨識度閾值選取范圍,所提供的檢測效果更為可靠。
4 結論
本文針對控制棒驅動機構動作點檢測可靠性的要求,在小波變換檢測控制棒驅動機構動作原理研究的基礎上,設計了基于特征放大的小波反應堆CRDM動作檢測方法,建立了無動作點電流上升段模型以及電流動作點模型。利用無動作點電流上升段模型對電流動作點的特征進行放大。該模型較好地擬合了無動作點電流上升段曲線和含動作點電流上升段曲線,表明所建模型的準確性。而檢測對比分析結果表明,相較于純小波變換動作點檢測方法,基于特征放大的小波反應堆CRDM動作檢測方法的辨識度更高、辨識度閾值可選取范圍更大,可以提供更為可靠的反應堆控制棒驅動機構動作點檢測。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
